调节装置及移动机器人的制作方法
本技术涉及机器人,具体而言,涉及一种调节装置及移动机器人。
背景技术:
1、目前,在金属结构加工领域(焊接、切割、打磨等加工),针对大型工程结构件(例如钢制储罐、球罐、管道、船体等大中型平面或弧面设备),在进行加工作业时,通常是采用机器人进行自动加工,机器人是通过多自由度机械手臂(即调节装置)夹持相应的功能组件(例如:焊枪,切割装置、打磨装置等)来进行自动加工,多自由度机械手臂通常是通过分别驱动多个铰接的操作臂进行转动,组合实现了对于功能组件的多自由度调节,但是因铰接结构的承载能力有限,对于功能组件无法实现有效承载,尤其是多自由度机械手臂在平移功能组件时(例如带动功能组件进行上下和左右移动),常常会出现平移阻滞现象,影响正常的金属加工作业。
技术实现思路
1、本实用新型提供了一种调节装置及移动机器人,以解决现有技术中的调节装置无法实现有效承载和多自由度调节的问题。
2、为了解决上述问题,根据本实用新型的一个方面,本实用新型提供了一种调节装置,包括依次连接的第一滑动总成、第二滑动总成、第一摆动总成、第二摆动总成和摆臂,所述第一滑动总成驱动第二滑动总成沿第一方向滑动,所述第二滑动总成驱动所述第一摆动总成沿第二方向滑动,所述第一方向和所述第二方向之间具有夹角,所述第一摆动总成驱动所述第二摆动总成绕第一轴线摆动,所述第二摆动总成驱动所述摆臂绕第二轴线摆动,所述第二轴线和所述第一轴线之间具有夹角。
3、进一步地,所述第一摆动总成包括第一座体、第一电机、第一传动组件和第一谐波减速器,所述第一座体安装在所述第二滑动总成上,所述第二滑动总成驱动所述第一座体滑动,所述第一电机、所述第一传动组件和所述第一谐波减速器均安装在所述第一座体上,所述第一电机通过所述第一传动组件驱动所述第一谐波减速器转动,其中,所述第二摆动总成和所述第一谐波减速器的输出端连接。
4、进一步地,所述第一传动组件包括依次配合的第一传动轮、第一传动带和第二传动轮,所述第一传动轮安装于所述第一电机的输出轴,所述第二传动轮安装于所述第一谐波减速器的输入端。
5、进一步地,所述第一摆动总成还包括第一张紧组件,所述第一张紧组件用于调节所述第一传动轮和所述第二传动轮之间的距离,以张紧所述第一传动带。
6、进一步地,所述第一张紧组件包括安装板和调节块,所述安装板滑动设置在所述第一座体上,所述第一电机安装于所述安装板,所述安装板具有凹槽,所述凹槽具有第一斜面,所述调节块具有第二斜面,所述调节块活动设置在所述第一座体上,所述调节块伸入所述凹槽内且伸入的深度可调节,所述第二斜面和所述第一斜面抵接,以调节所述安装板在所述第一座体上的位置。
7、进一步地,所述第二摆动总成包括第二座体、第二电机、第二传动组件和第二谐波减速器,所述第二座体安装在所述第二摆动总成上,所述第二摆动总成驱动所述第二座体摆动,所述第二电机、所述第二传动组件和所述第二谐波减速器均安装在所述第二座体上,所述第二电机通过所述第二传动组件驱动所述第二谐波减速器转动,其中,所述摆臂和所述第二谐波减速器的输出端连接。
8、进一步地,所述第二传动组件包括依次配合的第三传动轮、第二传动带和第四传动轮,所述第三传动轮安装于所述第二电机的输出轴,所述第四传动轮安装于所述第二谐波减速器的输入端;所述第二摆动总成还包括第二张紧组件,所述第二张紧组件用于调节所述第三传动轮和所述第四传动轮之间的距离,以张紧所述第二传动带。
9、进一步地,所述第一滑动总成包括第一基座、第一丝杆、第一导轨和第一滑座,所述第一丝杆和所述第一导轨平行设置在所述第一基座内,所述第一丝杆和所述第一滑座螺纹连接,以驱动所述第一滑座沿所述第一方向往返移动,所述第一导轨和所述第一滑座配合以对所述第一滑座导向;所述第二滑动总成包括第二基座、第二丝杆、第二导轨和第二滑座,所述第二基座和所述第一滑座固定连接,所述第二丝杆和所述第二导轨平行设置在所述第二基座内,所述第二丝杆和所述第二滑座螺纹连接,以驱动所述第二滑座沿所述第二方向往返移动,所述第二导轨和所述第二滑座配合以对所述第二滑座导向,所述第一摆动总成安装于所述第二滑座。
10、进一步地,所述第一方向、所述第二方向和所述第一轴线两两垂直,所述第二轴线垂直于所述第一轴线。
11、进一步地,所述调节装置还包括焊枪,所述焊枪和所述摆臂可拆卸连接。
12、根据本实用新型的另一方面,提供了一种移动机器人,所述移动机器人包括移动小车和上述的调节装置,所述调节装置安装于所述移动小车。
13、应用本实用新型的技术方案,提供了一种调节装置,包括依次连接的第一滑动总成、第二滑动总成、第一摆动总成、第二摆动总成和摆臂,第一滑动总成驱动第二滑动总成沿第一方向滑动,第二滑动总成驱动第一摆动总成沿第二方向滑动,第一方向和第二方向之间具有夹角,第一摆动总成驱动第二摆动总成绕第一轴线摆动,第二摆动总成驱动摆臂绕第二轴线摆动,第二轴线和第一轴线之间具有夹角。在该方案中,摆臂用于安装焊枪,切割装置、打磨装置等功能组件,通过第一滑动总成和第二滑动总成可带动功能组件沿两个不同的方向平移,并且采用滑动结构承载力强、移动平稳,通过第一摆动总成和第二摆动总成,可实现功能组件沿两个不同方向摆动,这样功能组件可至少具有四个自由度,可根据使用需要灵活调整位置。
技术特征:
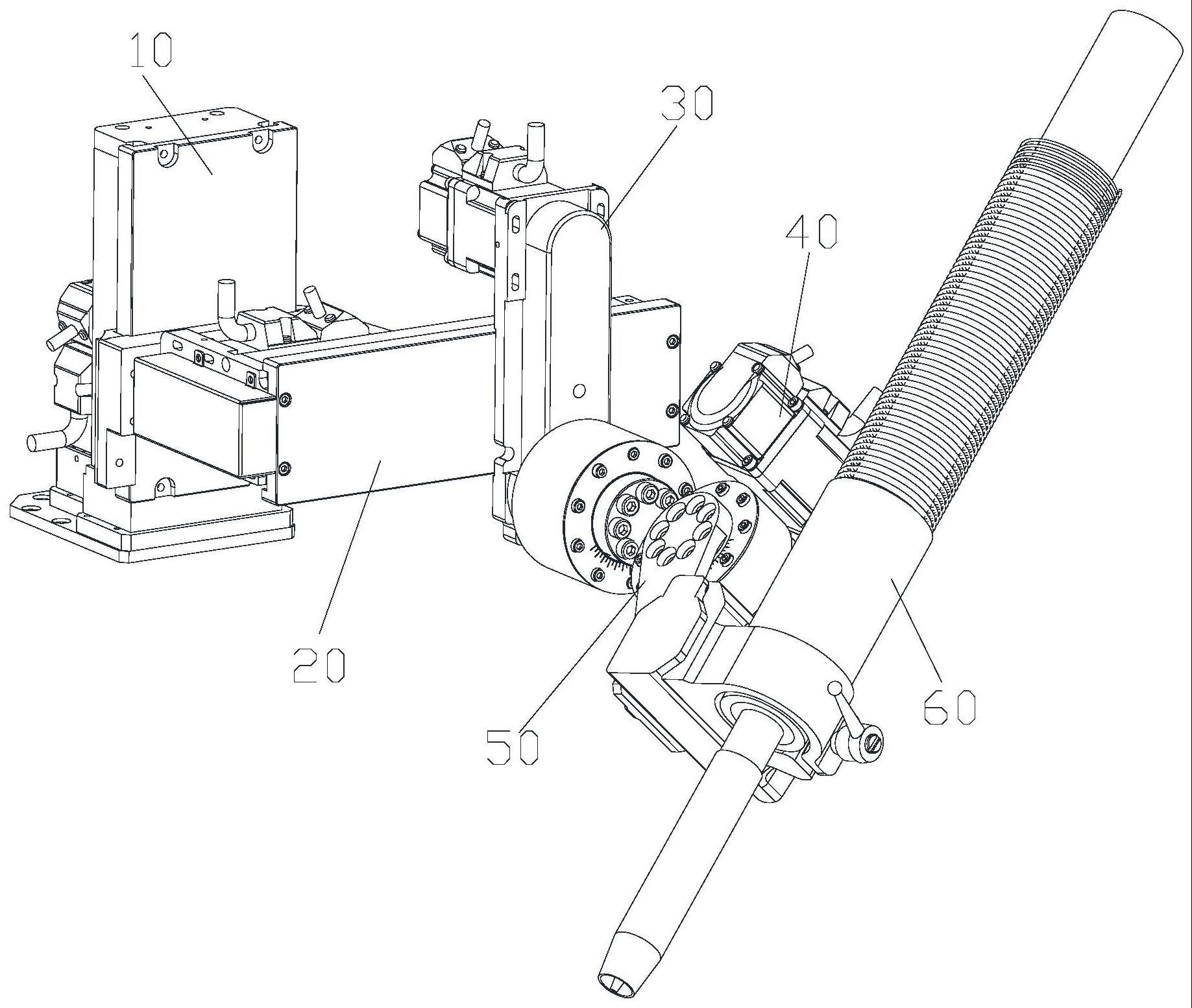
1.一种调节装置,其特征在于,包括依次连接的第一滑动总成(10)、第二滑动总成(20)、第一摆动总成(30)、第二摆动总成(40)和摆臂(50),所述第一滑动总成(10)驱动第二滑动总成(20)沿第一方向滑动,所述第二滑动总成(20)驱动所述第一摆动总成(30)沿第二方向滑动,所述第一方向和所述第二方向之间具有夹角,所述第一摆动总成(30)驱动所述第二摆动总成(40)绕第一轴线摆动,所述第二摆动总成(40)驱动所述摆臂(50)绕第二轴线摆动,所述第二轴线和所述第一轴线之间具有夹角。
2.根据权利要求1所述的调节装置,其特征在于,所述第一摆动总成(30)包括第一座体(31)、第一电机(32)、第一传动组件(33)和第一谐波减速器(34),所述第一座体(31)安装在所述第二滑动总成(20)上,所述第二滑动总成(20)驱动所述第一座体(31)滑动,所述第一电机(32)、所述第一传动组件(33)和所述第一谐波减速器(34)均安装在所述第一座体(31)上,所述第一电机(32)通过所述第一传动组件(33)驱动所述第一谐波减速器(34)转动,其中,所述第二摆动总成(40)和所述第一谐波减速器(34)的输出端连接。
3.根据权利要求2所述的调节装置,其特征在于,所述第一传动组件(33)包括依次配合的第一传动轮、第一传动带和第二传动轮,所述第一传动轮安装于所述第一电机(32)的输出轴,所述第二传动轮安装于所述第一谐波减速器(34)的输入端。
4.根据权利要求3所述的调节装置,其特征在于,所述第一摆动总成(30)还包括第一张紧组件,所述第一张紧组件用于调节所述第一传动轮和所述第二传动轮之间的距离,以张紧所述第一传动带。
5.根据权利要求4所述的调节装置,其特征在于,所述第一张紧组件包括安装板(35)和调节块(36),所述安装板(35)滑动设置在所述第一座体(31)上,所述第一电机(32)安装于所述安装板(35),所述安装板(35)具有凹槽,所述凹槽具有第一斜面,所述调节块(36)具有第二斜面,所述调节块(36)活动设置在所述第一座体(31)上,所述调节块(36)伸入所述凹槽内且伸入的深度可调节,所述第二斜面和所述第一斜面抵接,以调节所述安装板(35)在所述第一座体(31)上的位置。
6.根据权利要求1所述的调节装置,其特征在于,所述第二摆动总成(40)包括第二座体(41)、第二电机(42)、第二传动组件(43)和第二谐波减速器(44),所述第二座体(41)安装在所述第二摆动总成(40)上,所述第二摆动总成(40)驱动所述第二座体(41)摆动,所述第二电机(42)、所述第二传动组件(43)和所述第二谐波减速器(44)均安装在所述第二座体(41)上,所述第二电机(42)通过所述第二传动组件(43)驱动所述第二谐波减速器(44)转动,其中,所述摆臂(50)和所述第二谐波减速器(44)的输出端连接。
7.根据权利要求6所述的调节装置,其特征在于,所述第二传动组件(43)包括依次配合的第三传动轮、第二传动带和第四传动轮,所述第三传动轮安装于所述第二电机(42)的输出轴,所述第四传动轮安装于所述第二谐波减速器(44)的输入端;所述第二摆动总成(40)还包括第二张紧组件,所述第二张紧组件用于调节所述第三传动轮和所述第四传动轮之间的距离,以张紧所述第二传动带。
8.根据权利要求1所述的调节装置,其特征在于,
9.根据权利要求1所述的调节装置,其特征在于,所述第一方向、所述第二方向和所述第一轴线两两垂直,所述第二轴线垂直于所述第一轴线。
10.根据权利要求1所述的调节装置,其特征在于,所述调节装置还包括焊枪(60),所述焊枪(60)和所述摆臂(50)可拆卸连接。
11.一种移动机器人,其特征在于,所述移动机器人包括移动小车和权利要求1至10中任一项所述的调节装置,所述调节装置安装于所述移动小车。
技术总结
本技术提供了一种调节装置及移动机器人,调节装置包括依次连接的第一滑动总成、第二滑动总成、第一摆动总成、第二摆动总成和摆臂,第一滑动总成驱动第二滑动总成沿第一方向滑动,第二滑动总成驱动第一摆动总成沿第二方向滑动,第一方向和第二方向之间具有夹角,第一摆动总成驱动第二摆动总成绕第一轴线摆动,第二摆动总成驱动摆臂绕第二轴线摆动,第二轴线和第一轴线之间具有夹角。在该方案中,摆臂用于安装功能组件,通过第一滑动总成和第二滑动总成可带动功能组件沿两个不同的方向平移,通过第一摆动总成和第二摆动总成,可实现功能组件沿两个不同方向摆动,这样功能组件可至少具有四个自由度,可根据使用需要灵活调整位置。
技术研发人员:冯消冰,梁炎
受保护的技术使用者:北京博清科技有限公司
技术研发日:20230131
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!