侧挂式轨道机器人的制作方法
本申请涉及到巡检装置,特别是涉及到一种侧挂式轨道机器人。
背景技术:
1、目前,大多数轨道机器人可广泛应用于电力巡检领域,通过搭载摄像头,可代替人工在恶劣和特殊环境下执行特殊巡检任务或定制性巡检任务。常见的有轨机器人,通常结构包括有一滑动轨道和设置在滑动轨道上的行走机构,该行走机构上可搭载摄像头,该摄像头可用于实际采集巡检线路上的视频信息。
2、中国专利文献cn202010828588.5公开了一种轨道巡检机器人驱动系统和轨道巡检系统。该轨道巡检机器人驱动系统包括轨道、行走机构以及巡检机器人机架。轨道的两侧分别形成有导向面。行走机构包括至少一对马达直驱动力轮,每对马达直驱动力轮中的两个马达直驱动力轮分别支撑于轨道的两个导向面上,每对马达直驱动力轮通过连接板连接。由此可见,现有的轨道巡检机器人的行走机构采用在轨道的两侧上均设置驱动轮以带动摄像头的方式。由于两侧均设置有驱动轮,使得整个巡检系统臃肿,重量大且传动效率损耗大,同时轨道的两侧都需要较大的空间,不利于轨道机器人空间布局。
技术实现思路
1、本申请的主要目的为提供一种侧挂式轨道机器人,能够解决现有装置中的由于两侧均设置有驱动轮,使得整个巡检系统臃肿,重量大且传动效率损耗大,同时轨道的两侧都需要较大的空间,不利于轨道机器人空间布局的技术问题。
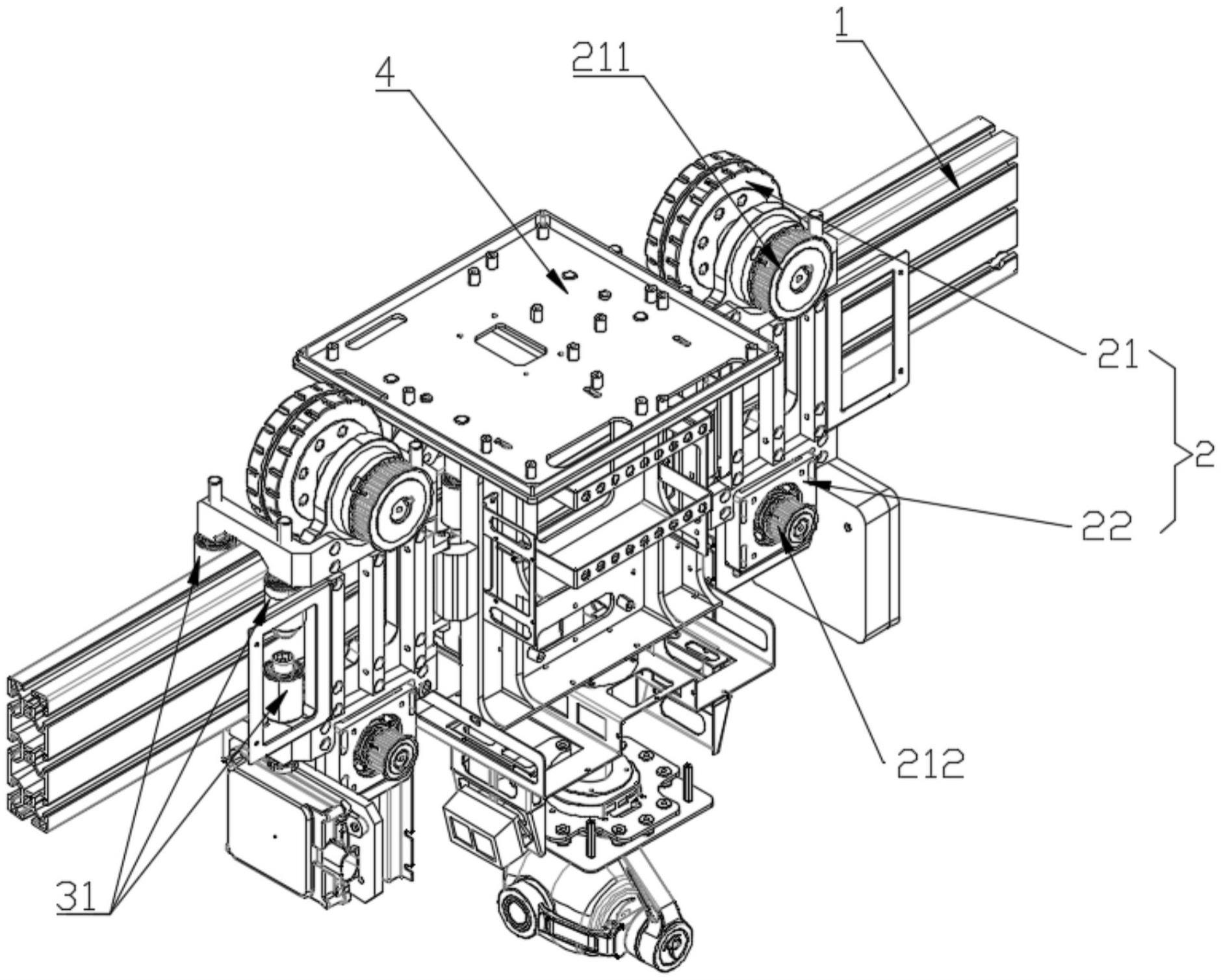
2、本申请提供的一种侧挂式轨道机器人,包括轨道、驱动机构、限位机构、摄像装置、中控装置以及机架,所述摄像装置设置在所述机架下侧,所述中控装置设置在所述机架上并与所述驱动机构及所述摄像装置形成接电及控制连接,所述驱动机构和所述限位机构均设置在所述机架上且所述驱动机构和所述限位机构相互配合将所述机架限定在所述轨道上的一侧,所述驱动机构带动所述机架沿所述轨道运动。
3、进一步地,所述驱动机构包括可转动地装设于所述机架上的移动辊轮和固定设置在所述机架上的驱动电机,所述移动辊轮的动力输入端设置有第一带轮,所述驱动电机的动力输出端设置有第二带轮,所述第一带轮和所述第二带轮上绕接有传动皮带。
4、进一步地,所述移动辊轮的外周面与所述轨道的上表面抵接,所述第一带轮和所述第二带轮位于所述轨道的同一侧上,所述驱动电机位于所述轨道的下方。
5、进一步地,所述移动辊轮和所述驱动电机均设置有两个,两个所述移动辊轮在第一方向上分别设于所述机架的两侧,两个所述驱动电机在第一方向上分别设于所述机架的两侧,其中,所述第一方向与所述机架的运动方向相同。
6、进一步地,所述移动辊轮的外周面上包覆有一层聚氨酯。
7、进一步地,所述限位机构包括可转动地装设于所述机架上的若干个第一限位轮和若干个第二限位轮,若干个所述第一限位轮将所述机架限制在所述轨道上的第二方向上,若干个所述第二限位轮将所述机架限制在所述轨道上的第三方向上,其中,所述第二方向位于水平面上且垂直于所述机架的运动方向,所述第三方向位于铅垂面上且垂直于所述机架的运动方向。
8、进一步地,所述第一限位轮设置有六个,其中两个在第一方向上的所述第一限位轮抵接于所述轨道的一侧,另外四个在所述第一方向上的所述第一限位轮抵接于所述轨道的另一侧,其中三个在第二方向上的所述第一限位轮抵接于所述移动辊轮的一侧,另外三个在所述第二方向上的所述第一限位轮抵接于所述移动辊轮的另一侧,其中,所述第一方向与所述机架的运动方向相同。
9、进一步地,所述第二限位轮设置有三个,其中两个在第一方向上的所述第一限位轮抵接于所述轨道的下表面,另外一个在所述第一方向上的所述第一限位轮抵接于所述轨道的上表面,其中,所述第一方向与所述机架的运动方向相同。
10、进一步地,所述第一限位轮和所述个第二限位轮的外周面上包裹有一层橡胶。
11、相对于现有技术,本申请提供了一种侧挂式轨道机器人,包括轨道、驱动机构、限位机构、摄像装置、中控装置以及机架,其中驱动机构述限位机构相互配合将所述机架限定在所述轨道上的一侧,驱动机构带动机架沿所述轨道运动,因此通过合理的结构设计使机架仅位于轨道的其中一层,减小了轨道两侧占用的空间以及整体质量,提高传动效率,利于巡航机器人空间布局。
技术特征:
1.一种侧挂式轨道机器人,其特征在于,包括轨道、驱动机构、限位机构、摄像装置、中控装置以及机架,所述摄像装置设置在所述机架下侧,所述中控装置设置在所述机架上并与所述驱动机构及所述摄像装置形成接电及控制连接,所述驱动机构和所述限位机构均设置在所述机架上且所述驱动机构和所述限位机构相互配合将所述机架限定在所述轨道上的一侧,所述驱动机构带动所述机架沿所述轨道运动。
2.根据权利要求1所述侧挂式轨道机器人,其特征在于,所述驱动机构包括可转动地装设于所述机架上的移动辊轮和固定设置在所述机架上的驱动电机,所述移动辊轮的动力输入端设置有第一带轮,所述驱动电机的动力输出端设置有第二带轮,所述第一带轮和所述第二带轮上绕接有传动皮带。
3.根据权利要求2所述侧挂式轨道机器人,其特征在于,所述移动辊轮的外周面与所述轨道的上表面抵接,所述第一带轮和所述第二带轮位于所述轨道的同一侧上,所述驱动电机位于所述轨道的下方。
4.根据权利要求2所述侧挂式轨道机器人,其特征在于,所述移动辊轮和所述驱动电机均设置有两个,两个所述移动辊轮在第一方向上分别设于所述机架的两侧,两个所述驱动电机在第一方向上分别设于所述机架的两侧,其中,所述第一方向与所述机架的运动方向相同。
5.根据权利要求2所述侧挂式轨道机器人,其特征在于,所述移动辊轮的外周面上包覆有一层聚氨酯。
6.根据权利要求2所述侧挂式轨道机器人,其特征在于,所述限位机构包括可转动地装设于所述机架上的若干个第一限位轮和若干个第二限位轮,若干个所述第一限位轮将所述机架限制在所述轨道上的第二方向上,若干个所述第二限位轮将所述机架限制在所述轨道上的第三方向上,其中,所述第二方向位于水平面上且垂直于所述机架的运动方向,所述第三方向位于铅垂面上且垂直于所述机架的运动方向。
7.根据权利要求6所述侧挂式轨道机器人,其特征在于,所述第一限位轮设置有六个,其中两个在第一方向上的所述第一限位轮抵接于所述轨道的一侧,另外四个在所述第一方向上的所述第一限位轮抵接于所述轨道的另一侧,其中三个在第二方向上的所述第一限位轮抵接于所述移动辊轮的一侧,另外三个在所述第二方向上的所述第一限位轮抵接于所述移动辊轮的另一侧,其中,所述第一方向与所述机架的运动方向相同。
8.根据权利要求6所述侧挂式轨道机器人,其特征在于,所述第二限位轮设置有三个,其中两个在第一方向上的所述第一限位轮抵接于所述轨道的下表面,另外一个在所述第一方向上的所述第一限位轮抵接于所述轨道的上表面,其中,所述第一方向与所述机架的运动方向相同。
9.根据权利要求6所述侧挂式轨道机器人,其特征在于,所述第一限位轮和所述第二限位轮的外周面上包裹有一层橡胶。
技术总结
本申请涉及到巡检装置技术领域,提供了一种侧挂式轨道机器人,包括轨道、驱动机构、限位机构、摄像装置、中控装置以及机架,所述摄像装置设置在所述机架下侧,所述中控装置设置在所述机架上并与所述驱动机构及所述摄像装置形成接电及控制连接,所述驱动机构和所述限位机构均设置在所述机架上且所述驱动机构和所述限位机构相互配合将所述机架限定在所述轨道上的一侧,所述驱动机构带动所述机架沿所述轨道运动,因此通过合理的结构设计使机架仅位于轨道的其中一层,减小了轨道两侧占用的空间以及整体质量,提高传动效率,利于巡航机器人空间布局。
技术研发人员:杨尚恒,周德忠,纪锡鹏
受保护的技术使用者:造物者智能科技(广州)有限公司
技术研发日:20230213
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!