一种改进型七轴并联机械手的制作方法
本技术涉及一种并联机机器人,具体涉及一种改进型七轴并联机械手。
背景技术:
1、多轴协作机械手通常采用各轴串联的结构,这种结构的缺点是后端轴的驱动零部件往往作为前端轴的额外负载,使得后端轴的功率有很大一部分用于这额外的负载,白白浪费了,而且轴数越多浪费也越大。
技术实现思路
1、本实用新型所要解决的技术问题是提供了一种改进型七轴并联机械手;通过在采用一个六轴并联机器人主体本体加一个延伸臂端轴的方式,简化了结构;而且主要的驱动零部件都是固定在基座上,不会作为负载消耗功率,效率会更高;通过杠杆放大作用,使得延伸臂末端有更大的运动范围和更快的运动速度。
2、本实用新型改进型七轴并联机械手是通过以下技术方案来实现的:包括六轴并联机器人主体和延伸臂;延伸臂安装于六轴并联机器人主体下端;
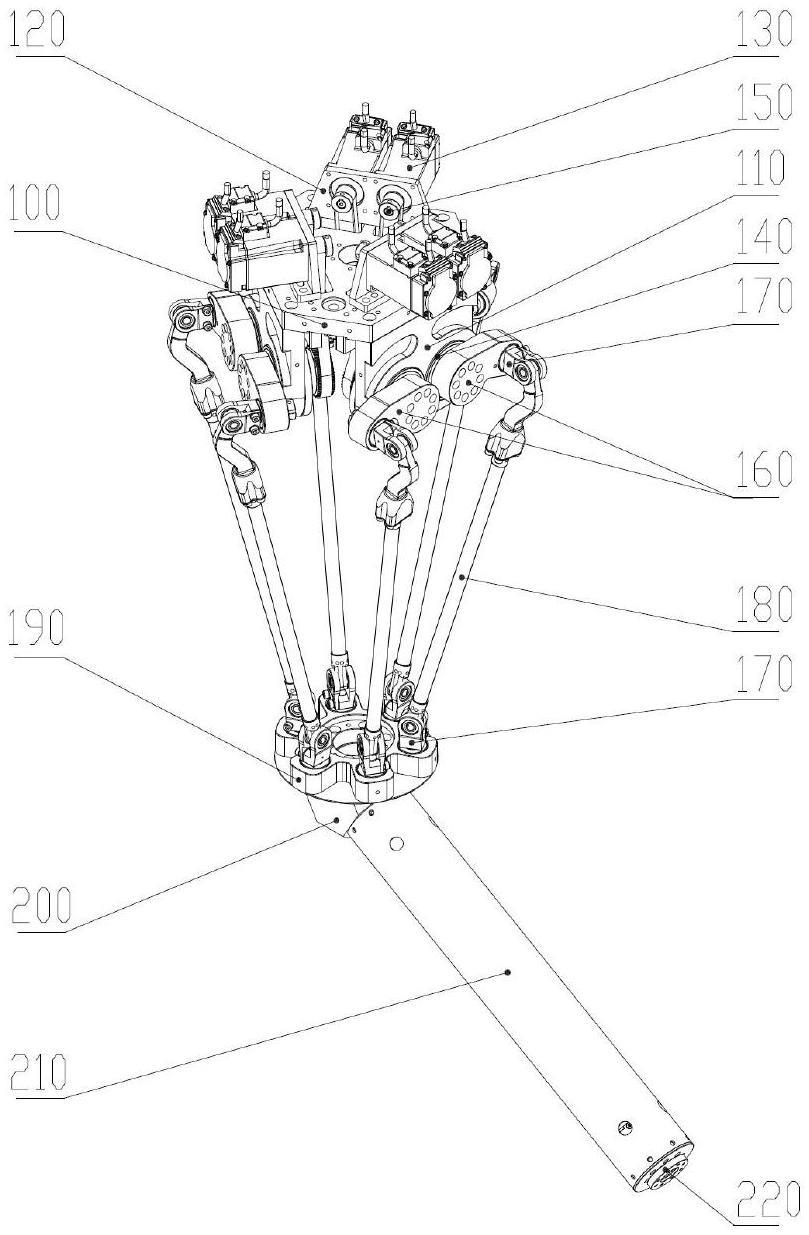
3、六轴并联机器人主体包括安装板、双减速机座、双电机座、电机以及中心盘;延伸臂包括弯头连接座和延长管以及减速电机;
4、装板用于整个机械手的安装固定,三个双减速机座围绕安装板中心等分均布安装在安装板的下方,每个双减速机座上并排安装有两个减速机;三个双电机座围绕安装板中心等分均布安装在安装板的上方,每个双电机座上并排安装两个电机;电机和减速机两两并排安装设置;六个电机,每个电机对应安装有一个减速机、一套同步带轮组件、一个摇臂、两套关节以及一套拉杆。
5、作为优选的技术方案,同步带轮组件由主动轮、同步带、被动轮以及张力调节轮组成;主动轮安装在电机的输出轴上,被动轮安装在减速机的输入轴上,主动轮和被动轮通过同步带连接;摇臂安装在减速机的输出端上。
6、作为优选的技术方案,摇臂的远端安装一套关节,此关节与拉杆的上端连接;中心盘上相应的位置装有六套关节,此关节分别与相应拉杆的下端连接。
7、作为优选的技术方案,关节与摇臂和中心盘的安装方式是一样的,关节的左夹板和右夹板内各装有一个深沟球轴承,拉杆两端设置有第一连接件和第二连接件;第一连接件和第二连接件安装在这两个深沟球轴承之间,拉杆可以以深沟球轴承的轴线为轴心旋转;左夹板和右夹板通过销轴和螺钉抱紧固定在芯轴的一端;一对第一角接触轴承以背对背的方式安装在摇臂或中心盘的轴承孔内,芯轴从第一角接触轴承的内孔穿过,第一锁紧螺母锁紧在芯轴另一端的螺牙上,即将关节安装在摇臂或中心盘上。
8、作为优选的技术方案,第一连接件和第二连接件围绕拉杆的轴心相对旋转;拉杆的第一连接件采用弯曲的形状;拉杆的第二连接件的螺纹侧轴穿过一对背对背的第二角接触轴承的内孔,用第二锁紧螺母将第二角接触轴承锁紧在第二连接件的螺纹侧轴上;将第二角接触轴承的外圈装入第一连接件的轴承孔内,用螺丝将轴承压盖压紧第二角接触轴承的外圈。
9、作为优选的技术方案,延伸臂作为机械手的前臂,通过弯头连接座固定在六轴并联机器人主体的中心盘下方;延长管采用碳纤维材质;延长管的近端与弯头连接座固定,远端与减速电机固定,减速电机通过安装法兰安装在延长管的远端,减速电机输出轴法兰上安装负载元件。
10、本实用新型的有益效果是:通过采用一个六轴并联机器人主体本体加一个延伸臂端轴的方式,简化了结构;而且主要的驱动零部件都是固定在基座上,不会作为负载消耗功率,效率会更高;通过杠杆放大作用,使得延伸臂末端有更大的运动范围和更快的运动速度;延伸臂远端的位置和状态便跟随着中心盘位置、旋转角度和倾斜度的变化而改变,由于杠杆放大的作用。
技术特征:
1.一种改进型七轴并联机械手,其特征在于:包括六轴并联机器人主体(001)和延伸臂(002);延伸臂(002)安装于六轴并联机器人主体(001)下端;
2.根据权利要求1所述的改进型七轴并联机械手,其特征在于:同步带轮组件(150)由主动轮(151)、同步带(152)、被动轮(153)以及张力调节轮(154)组成;主动轮(151)安装在电机(130)的输出轴上,被动轮(153)安装在减速机(140)的输入轴上,主动轮(151)和被动轮(153)通过同步带(152)连接;摇臂(160)安装在减速机(140)的输出端上。
3.根据权利要求2所述的改进型七轴并联机械手,其特征在于:摇臂(160)的远端安装一套关节(170),此关节(170)与拉杆(180)的上端连接;中心盘(190)上相应的位置装有六套关节(170),此关节(170)分别与相应拉杆(180)的下端连接。
4.根据权利要求3所述的改进型七轴并联机械手,其特征在于:关节(170)与摇臂(160)和中心盘(190)的安装方式是一样的,关节(170)的左夹板(171)和右夹板(172)内各装有一个深沟球轴承(173),拉杆(180)两端设置有第一连接件(181)和第二连接件(182);第一连接件(181)和第二连接件(182)安装在这两个深沟球轴承(173)之间,拉杆(180)可以以深沟球轴承(173)的轴线为轴心旋转;左夹板(171)和右夹板(172)通过销轴(174)和螺钉(175)抱紧固定在芯轴(177)的一端;一对第一角接触轴承(176)以背对背的方式安装在摇臂(160)或中心盘(190)的轴承孔内,芯轴(177)从第一角接触轴承(176)的内孔穿过,第一锁紧螺母(178)锁紧在芯轴(177)另一端的螺牙上,即将关节(170)安装在摇臂(160)或中心盘(190)上。
5.根据权利要求4所述的改进型七轴并联机械手,其特征在于:第一连接件(181)和第二连接件(182)围绕拉杆(180)的轴心相对旋转;拉杆(180)的第一连接件(181)采用弯曲的形状;拉杆(180)的第二连接件(182)的螺纹侧轴穿过一对背对背的第二角接触轴承(1821)的内孔,用第二锁紧螺母(1822)将第二角接触轴承(1821)锁紧在第二连接件(182)的螺纹侧轴上;将第二角接触轴承(1821)的外圈装入第一连接件(181)的轴承孔内,用螺丝(1812)将轴承压盖(1811)压紧第二角接触轴承(1821)的外圈。
6.根据权利要求4所述的改进型七轴并联机械手,其特征在于:延伸臂(002)作为机械手的前臂,通过弯头连接座(200)固定在六轴并联机器人主体(001)的中心盘(190)下方;延长管(210)采用碳纤维材质;延长管(210)的近端与弯头连接座(200)固定,远端与减速电机(220)固定,减速电机(220)通过安装法兰(221)安装在延长管(210)的远端,减速电机(220)输出轴法兰(222)上安装负载元件。
技术总结
本技术公开了一种改进型七轴并联机械手,包括六轴并联机器人主体和延伸臂;延伸臂安装于六轴并联机器人主体下端;六轴并联机器人主体包括安装板、双减速机座、双电机座、电机和中心盘;延伸臂包括弯头连接座和延长管以及减速电机;装板用于整个机械手的安装固定,三个双减速机座围绕安装板中心等分均布安装在安装板的下方;通过采用一个六轴并联机器人本体加一个延伸臂端轴的方式,简化了结构;而且主要的驱动零部件都是固定在基座上,不会作为负载消耗功率,效率会更高;通过杠杆放大作用,使得延伸臂末端更大的运动范围和更快的运动速度;延伸臂远端的位置和状态便跟随着中心盘位置、旋转角度和倾斜度的变化而改变,由于杠杆放大的作用。
技术研发人员:韦志华,谭军
受保护的技术使用者:深圳市领略数控设备有限公司
技术研发日:20230222
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!