一种用于电力隧道的智能巡检机器人的制作方法
本技术属于电力隧道维护,更具体地说,特别涉及一种用于电力隧道的智能巡检机器人。
背景技术:
1、在输配电过程中,部分电缆被铺设于电缆隧道(廊道)中。目前,隧道电力电缆线路的运行巡视和检修工作大部分都由人工完成。由于隧道中环境湿度大,积水情况常见,且经常伴有有毒气体存在,因此采用人工进行巡检工作的方式会存在工作环境危险、劳动强度大和工作效率低等弊端,并对人工巡视造成非常大的阻碍。同时,采用人工进行巡检工作的方式频率低和间隔长。因此,现需大力发展机器人自动巡检技术来代替传统的人工巡检方式。
2、现有中国专利公开了一种电力电缆隧道自动巡检机器人(公开号cn214187164u),包括底座与机器人本体,所述机器人本体设于底座的上方,所述底座的底部设有多个移动轮,所述底座的顶部固定连接有支撑板,所述机器人本体的底部固定连接有对称设置的两个支撑套,两个所述支撑套内均滑动连接有滑块,所述滑块的底部固定连接有连接块,所述连接块远离滑块的一端贯穿支撑套并与支撑板固定连接,所述连接块位于支撑套内的侧壁上套设有第一弹性装置,所述第一弹性装置的两端分别与滑块和支撑套内壁固定连接,所述机器人本体的两侧外壁上均固定连接有安装板,所述安装板的一侧设有缓冲板,所述缓冲板与安装板之间通过对称设置的两个阻尼减震器固定连接,所述缓冲板靠近安装板的一侧设有两个凹槽,两个所述凹槽内均滑动连接有楔形块,两个所述楔形块相背的一侧与凹槽内壁之间通过第二弹性装置固定连接,所述安装板的侧壁上对应凹槽位置处固定连接有安装块,所述安装块的一端上转动连接有滚轮,该电力电缆隧道自动巡检机器人,通过底座底部上的移动轮实现移动,机器人本体底部上的支撑套在移动过程中可受力下移带动滑块在内部运动,此时安装在连接块上的第一弹性装置在滑块的拉动下产生回弹力,从而使机器人本体在移动时的减震性更好。然而该电力隧道的智能巡检机器人缺少防护功能,在智能巡检机器人运行过程中隧道中的杂物或设备如果意外落下会对隧道侦测巡检机器人造成伤害,容易将摄像头砸伤,也容易对机器人的内部零件造成损伤,降低了机器人的使用寿命。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种用于电力隧道的智能巡检机器人,以期达到更具有更加实用价值性的目的。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种用于电力隧道的智能巡检机器人,以解决现在的电力隧道的智能巡检机器人缺少防护功能,在智能巡检机器人运行过程中隧道中的杂物或设备如果意外落下会对隧道侦测巡检机器人造成伤害,容易将摄像头砸伤,也容易对机器人的内部零件造成损伤,降低了机器人的使用寿命的问题。
2、本实用新型用于电力隧道的智能巡检机器人的目的与功效,由以下具体技术手段所达成:
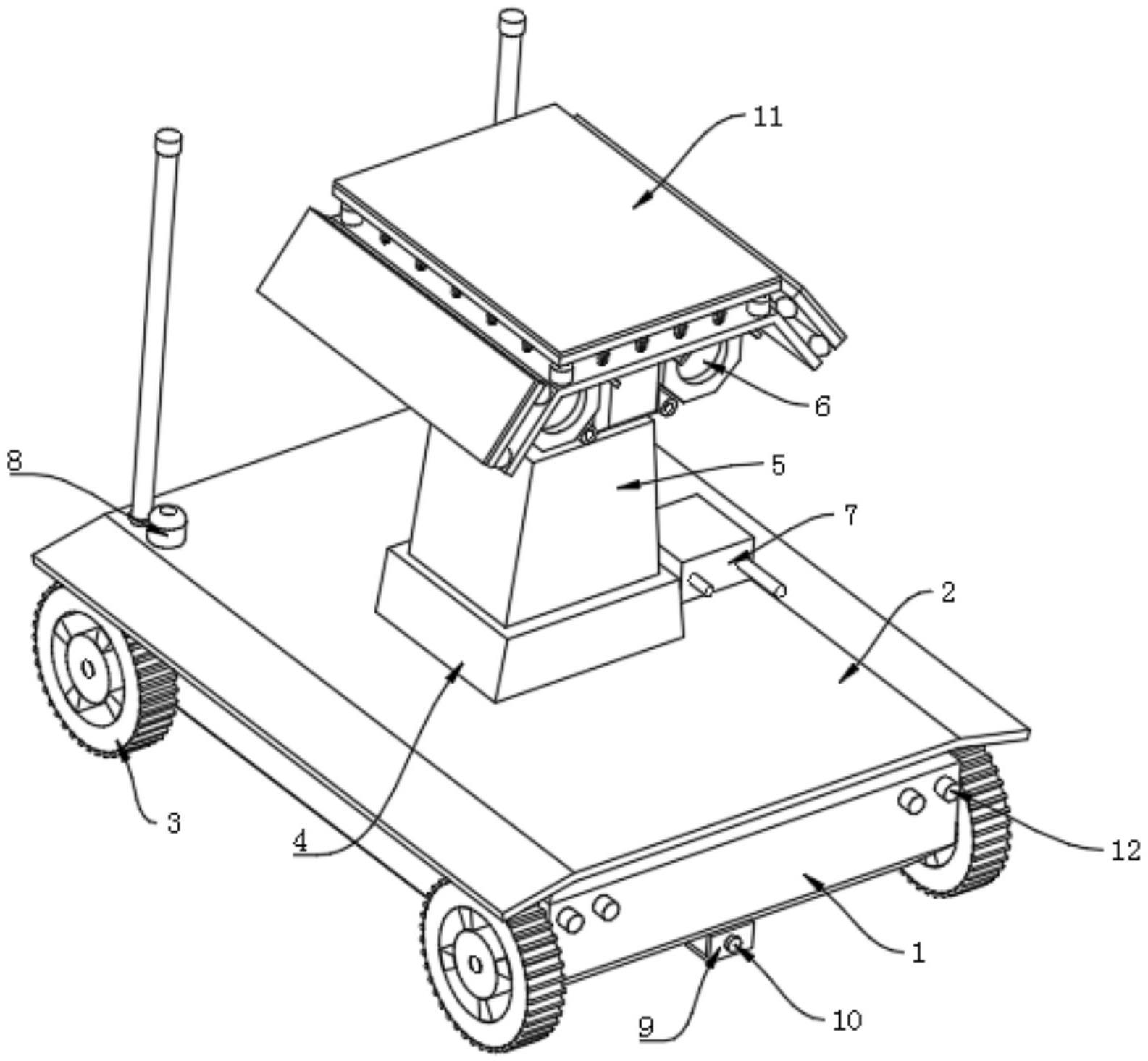
3、一种用于电力隧道的智能巡检机器人,包括机器人底座,所述机器人底座的顶部设置有盖板,所述盖板的顶部设置有云台座,所述云台座的顶部设置有云台,所述云台的顶部两侧均设置有红外线摄像头,所述云台的顶部设置有防护机构,所述防护机构包括防护板,所述防护板设置于云台的顶部,所述防护板的上方设置有横板,所述防护板的两侧均设置有斜板,所述防护板和横板之间等距分布有多个第一缓冲圆环,每个所述第一缓冲圆环的内部均套设有与第一缓冲圆环相垂直的第二缓冲圆环,每个所述第一缓冲圆环与第二缓冲圆环的交点为受力点,所述防护板和斜板之间分布有多个空气气囊。
4、进一步的,所述横板的顶部和两个斜板的顶部均设置有橡胶层。
5、进一步的,所述横板的底部四角均连接有活塞杆,所述防护板的顶部四角均连接有支撑柱,每个所述活塞杆均滑动插接于相对应的支撑柱内部。
6、进一步的,每个所述支撑柱内均设置有弹性胶泥层,每个所述活塞杆的底端均连接有活塞橡胶板,每个所述活塞橡胶板均与弹性胶泥层的顶部相接触。
7、进一步的,所述弹性胶泥层采用有机硅高分子化合物材料制成。
8、进一步的,所述机器人底座的底部四角均设置有移动轮,所述机器人底座的底部内设置有驱动电机,所述驱动电机与其中一个移动轮相连接。
9、进一步的,所述盖板的顶部安装有温湿度传感器,所述盖板的顶部后侧安装有警示灯,所述机器人底座的前侧安装有照明灯,所述机器人底座的底部前侧安装有支撑板,所述支撑板的前侧安装有避障传感器。
10、与现有技术相比,本实用新型具有如下有益效果:
11、1、本实用新型中的通过设置防护机构,利用第一缓冲圆环和第二缓冲圆环会受压发生形变,从而对外物撞击红外线摄像头顶部时产生的冲击力进行吸收,进行缓冲,直到趋于平稳,同时,利用空气气囊对红外线摄像头的外侧进行进一步缓冲,能够对机器人进行保护,避免机器人在运行过程中物体意外落下对巡检机器人造成伤害,对机器人的内部零件造成损伤,减少机器人的使用寿命,同时橡胶层减少了物体掉落在机器人上表面时产生的冲击力,起到了缓冲的效果,使得机器人的红外线摄像头不会在外物的撞击下发生损坏,保证了红外线摄像头正常的使用寿命;
12、2、通过设置温湿度传感器、警示灯、照明灯和避障传感器配合使用,在维护管理不够完善的电力隧道中,大大降低了巡检的工作强度,改善巡检的工作环境,还有效地提高工作效率,通过巡检机器人与地面远程控制中心的交互下,完成电力隧道的综合巡检,实现检测电力隧道的有害气体、烟雾、温度、湿度、图像采集、电力故障检测及紧急情况报警的功能。
技术特征:
1.一种用于电力隧道的智能巡检机器人,其特征在于:包括机器人底座(1),所述机器人底座(1)的顶部设置有盖板(2),所述盖板(2)的顶部设置有云台座(4),所述云台座(4)的顶部设置有云台(5),所述云台(5)的顶部两侧均设置有红外线摄像头(6),所述云台(5)的顶部设置有防护机构(11),所述防护机构(11)包括防护板(111),所述防护板(111)设置于云台(5)的顶部,所述防护板(111)的上方设置有横板(112),所述防护板(111)的两侧均设置有斜板(113),所述防护板(111)和横板(112)之间等距分布有多个第一缓冲圆环(115),每个所述第一缓冲圆环(115)的内部均套设有与第一缓冲圆环(115)相垂直的第二缓冲圆环(121),每个所述第一缓冲圆环(115)与第二缓冲圆环(121)的交点为受力点,所述防护板(111)和斜板(113)之间分布有多个空气气囊(120)。
2.如权利要求1所述用于电力隧道的智能巡检机器人,其特征在于:所述横板(112)的顶部和两个斜板(113)的顶部均设置有橡胶层(114)。
3.如权利要求1所述用于电力隧道的智能巡检机器人,其特征在于:所述横板(112)的底部四角均连接有活塞杆(116),所述防护板(111)的顶部四角均连接有支撑柱(117),每个所述活塞杆(116)均滑动插接于相对应的支撑柱(117)内部。
4.如权利要求3所述用于电力隧道的智能巡检机器人,其特征在于:每个所述支撑柱(117)内均设置有弹性胶泥层(119),每个所述活塞杆(116)的底端均连接有活塞橡胶板(118),每个所述活塞橡胶板(118)均与弹性胶泥层(119)的顶部相接触。
5.如权利要求4所述用于电力隧道的智能巡检机器人,其特征在于:所述弹性胶泥层(119)采用有机硅高分子化合物材料制成。
6.如权利要求1所述用于电力隧道的智能巡检机器人,其特征在于:所述机器人底座(1)的底部四角均设置有移动轮(3),所述机器人底座(1)的底部内设置有驱动电机,所述驱动电机与其中一个移动轮(3)相连接。
7.如权利要求1所述用于电力隧道的智能巡检机器人,其特征在于:所述盖板(2)的顶部安装有温湿度传感器(7),所述盖板(2)的顶部后侧安装有警示灯(8),所述机器人底座(1)的前侧安装有照明灯(12),所述机器人底座(1)的底部前侧安装有支撑板(9),所述支撑板(9)的前侧安装有避障传感器(10)。
技术总结
本技术提供一种用于电力隧道的智能巡检机器人,包括机器人底座,所述机器人底座的顶部设置有盖板,所述盖板的顶部设置有云台座,所述云台座的顶部设置有云台,所述云台的顶部两侧均设置有红外线摄像头,所述云台的顶部设置有防护机构,所述防护机构包括防护板,本技术中的通过设置防护机构,利用第一缓冲圆环和第二缓冲圆环会受压发生形变,从而对外物撞击红外线摄像头顶部时产生的冲击力进行吸收,进行缓冲,直到趋于平稳,同时,利用空气气囊对红外线摄像头的外侧进行进一步缓冲,能够对机器人进行保护,避免机器人在运行过程中物体意外落下对巡检机器人造成伤害,对机器人的内部零件造成损伤,减少机器人的使用寿命。
技术研发人员:徐爱红,邓康,徐拓鹏,李翠苗
受保护的技术使用者:旭能(深圳)建设有限公司
技术研发日:20230216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!