机械手的手指组件安装结构的制作方法
本技术涉及机械手,具体涉及机械手的手指组件安装结构。
背景技术:
1、晶圆在加工过程中会经过数百道工艺,随着工艺流转,在某些工艺段需要使用机械手对晶圆进行取放片操作。机械手一般包括wrist组件(即手腕组件)和finger组件(即手指组件),手指组件固定在手腕组件上,用于承载晶圆。
2、实际使用时,由于会有不同尺寸及类型的晶圆需要在同一台设备上进行检测,因此就需要不同尺寸的手指组件。另外,在某些工艺段需要对晶圆的背面缺陷进行检测,但晶圆背面和正面的图形区域(图形区域即有芯片的区域)不允许被接触,因此需要带框晶圆(frame wafer)以满足上述背面缺陷检测需求。而带框晶圆(frame wafer)与普通晶圆(normal wafer)存在结构差异,也需要不同类型的手指组件。
技术实现思路
1、本实用新型主要解决的技术问题是如何使机械手满足不同目标物的使用需求的问题。
2、本实用新型提供了一种机械手的手指组件安装结构。
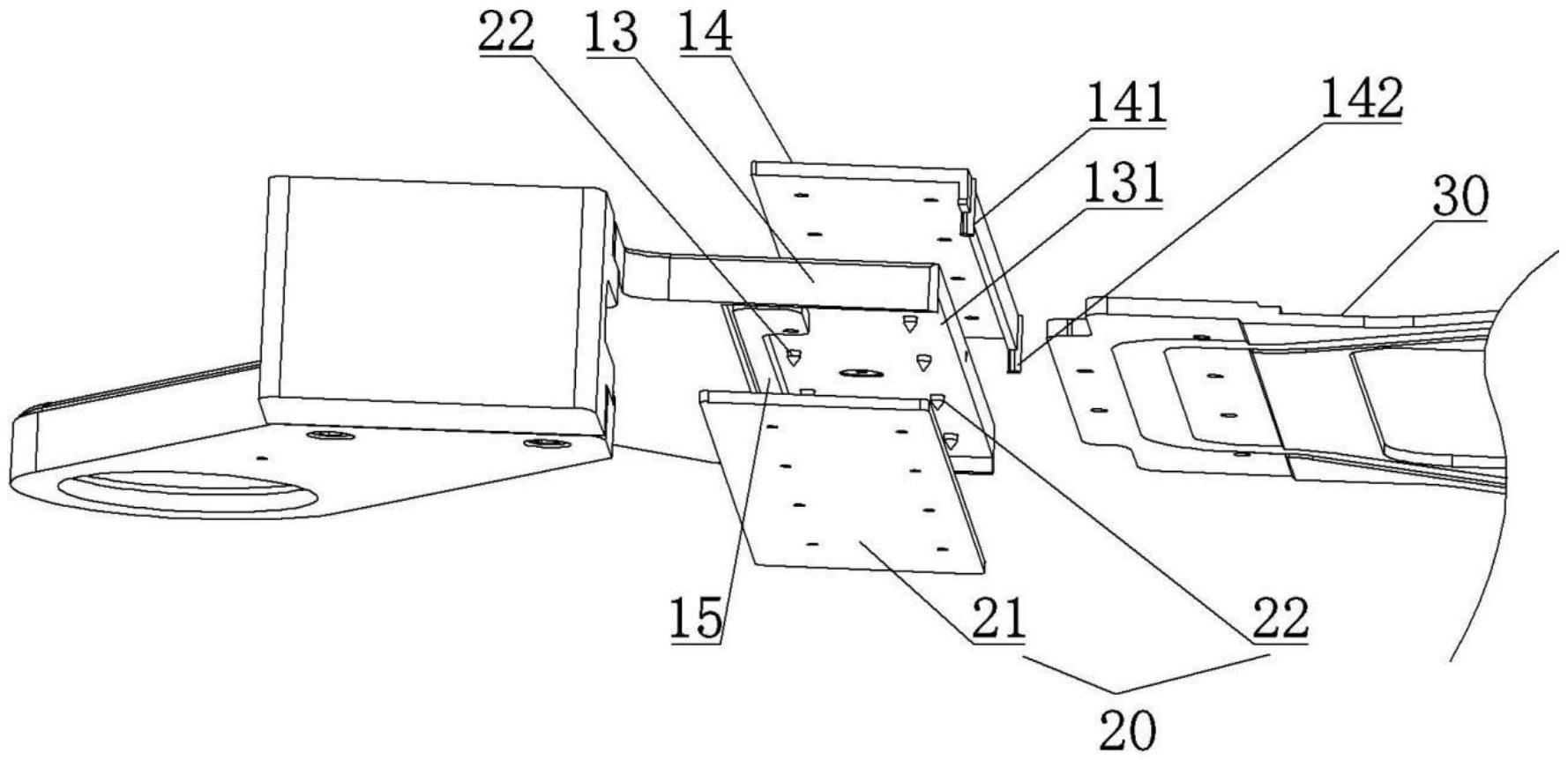
3、机械手的手指组件安装结构,包括:
4、手指组件,所述手指组件上设有适配定位结构;
5、手指安装基体,所述手指安装基体上设有公用定位结构,所述公用定位结构用于与所述适配定位结构定位配合,以将任一对应规格的所述手指组件定位安装到所述手指安装基体上;
6、以及固定件,所述固定件用于将任一对应规格的手指组件固定到所述手指安装基体上。
7、在一种技术方案中,所述固定件包括压板和压接螺钉,所述压板用于层叠至所述手指组件上,所述手指组件上设有供所述压接螺钉穿过的螺钉穿孔,所述压接螺钉用于对压板施加压紧力以将所述手指组件按压到所述手指安装基体上。
8、在一种技术方案中,所述手指安装基体上设有避让槽,所述压板嵌入所述避让槽内。
9、在一种技术方案中,所述公用定位结构包括定位凸部,所述定位凸部凸出于所述手指安装基体的用于支撑所述手指组件的一侧;所述适配定位结构包括定位凹腔,所述定位凹腔供所述定位凸部进入,所述定位凹腔具有与所述定位凸部适配的腔侧壁,所述腔侧壁用于定位所述手指组件。
10、在一种技术方案中,所述定位凹腔延伸至所述手指组件的侧边并在所述手指组件的侧边形成贯穿开口,所述贯穿开口供所述定位凸部沿所述定位凹腔的延伸方向进入所述定位凹腔内。
11、在一种技术方案中,所述手指安装基体上设有导向凸部,所述导向凸部与所述定位凸部间隔布置,间隔方向与所述定位凹腔的延伸方向垂直;所述导向凸部与对应定位凹腔的配合精度低于所述定位凸部与对应定位凹腔的配合精度,以避免所述导向凸部和所述定位凸部对所述手指组件形成过定位。
12、在一种技术方案中,所述定位凸部为柱状销,或者为条形键。
13、在一种技术方案中,所述手指安装基体包括基体主体和可拆定位件,所述可拆定位件可拆卸地固定在所述基体主体上,所述公用定位结构设置在所述可拆定位件上。
14、在一种技术方案中,所述固定件包括压接螺钉,所述压接螺钉用于对手指组件形成压紧力;在所述压接螺钉的轴向上,所述可拆定位件位于所述基体主体的最外侧,至少一处所述压接螺钉从所述可拆定位件上穿过。
15、在一种技术方案中,所述可拆定位件的对应边缘伸出所述手指安装基体的边沿外侧,伸出部分设有折边,所述折边与所述可拆定位件的主体形成l形结构,所述折边挡止在所述手指安装基体的对应侧端面上以与所述手指安装基体的对应侧端面形成定位配合。
16、在一种技术方案中,所述手指安装基体包括内衬件,所述内衬件与所述可拆定位件位于所述基体主体厚度方向的不同侧,所述手指安装基体、内衬件和所述可拆定位件上穿装有固定螺钉,所述固定螺钉使得所述手指安装基体被夹紧在所述内衬件和所述可拆定位件之间,并且实现所述可拆定位件的固定。
17、本实用新型的有益效果:
18、据上述机械手的手指组件安装结构,由于手指安装基体上的公用定位结构能够供任一对应规格的手指组件依靠适配定位结构定位配合,因此能够满足两种以上规格手指组件的各自定位需求,便于在更换不同的手指组件时可以快速的更换finger,可准确定位,直接更换后安装位置精度满足传片需求,无需重新示教robot点位,节省时间。
技术特征:
1.机械手的手指组件安装结构,其特征在于,包括:
2.如权利要求1所述的机械手的手指组件安装结构,其特征在于,所述固定件包括压板和压接螺钉,所述压板用于层叠至所述手指组件上,所述手指组件上设有供所述压接螺钉穿过的螺钉穿孔,所述压接螺钉用于对压板施加压紧力以将所述手指组件按压到所述手指安装基体上。
3.如权利要求2所述的机械手的手指组件安装结构,其特征在于,所述手指安装基体上设有避让槽,所述压板嵌入所述避让槽内。
4.如权利要求1-3中任意一项所述的机械手的手指组件安装结构,其特征在于,所述公用定位结构包括定位凸部,所述定位凸部凸出于所述手指安装基体的用于支撑所述手指组件的一侧;所述适配定位结构包括定位凹腔,所述定位凹腔供所述定位凸部进入,所述定位凹腔具有与所述定位凸部适配的腔侧壁,所述腔侧壁用于定位所述手指组件。
5.如权利要求4所述的机械手的手指组件安装结构,其特征在于,所述定位凹腔延伸至所述手指组件的侧边并在所述手指组件的侧边形成贯穿开口,所述贯穿开口供所述定位凸部沿所述定位凹腔的延伸方向进入所述定位凹腔内。
6.如权利要求5所述的机械手的手指组件安装结构,其特征在于,所述手指安装基体上设有导向凸部,所述导向凸部与所述定位凸部间隔布置,间隔方向与所述定位凹腔的延伸方向垂直;所述导向凸部与对应定位凹腔的配合精度低于所述定位凸部与对应定位凹腔的配合精度,以避免所述导向凸部和所述定位凸部对所述手指组件形成过定位。
7.如权利要求4所述的机械手的手指组件安装结构,其特征在于,所述定位凸部为柱状销,或者为条形键。
8.如权利要求1所述的机械手的手指组件安装结构,其特征在于,所述手指安装基体包括基体主体和可拆定位件,所述可拆定位件可拆卸地固定在所述基体主体上,所述公用定位结构设置在所述可拆定位件上。
9.如权利要求8所述的机械手的手指组件安装结构,其特征在于,所述固定件包括压接螺钉,所述压接螺钉用于对手指组件形成压紧力;在所述压接螺钉的轴向上,所述可拆定位件位于所述基体主体的最外侧,至少一处所述压接螺钉从所述可拆定位件上穿过。
10.如权利要求8所述的机械手的手指组件安装结构,其特征在于,所述可拆定位件的对应边缘伸出所述手指安装基体的边沿外侧,伸出部分设有折边,所述折边与所述可拆定位件的主体形成l形结构,所述折边挡止在所述手指安装基体的对应侧端面上以与所述手指安装基体的对应侧端面形成定位配合。
11.如权利要求8所述的机械手的手指组件安装结构,其特征在于,所述手指安装基体包括内衬件,所述内衬件与所述可拆定位件位于所述基体主体厚度方向的不同侧,所述手指安装基体、内衬件和所述可拆定位件上穿装有固定螺钉,所述固定螺钉使得所述手指安装基体被夹紧在所述内衬件和所述可拆定位件之间,并且实现所述可拆定位件的固定。
技术总结
本技术涉及机械手,具体涉及机械手的手指组件安装结构。机械手的手指组件安装结构,包括:手指组件,手指组件上设有适配定位结构;手指安装基体,手指安装基体上设有公用定位结构,公用定位结构用于与适配定位结构定位配合,以将任一对应规格的手指组件定位安装到手指安装基体上;以及固定件,固定件用于将任一对应规格的手指组件固定到手指安装基体上。公用定位结构能够供任一对应规格的手指组件依靠适配定位结构定位配合,因此能够满足两种以上规格手指组件的各自定位需求,便于在更换不同的手指组件时实现各手指组件的准确定位,同时固定件能够满足手指组件的固定需求,从而仅通过更换局部的手指组件即可满足不同目标物体的使用需求。
技术研发人员:董坤玲,张鹏斌,陈鲁,张嵩
受保护的技术使用者:深圳中科飞测科技股份有限公司
技术研发日:20230307
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!