扳手装置、前束调整装置及四轮定位系统的制作方法
本技术涉及汽车检测,特别涉及一种扳手装置、前束调整装置及四轮定位系统。
背景技术:
1、新车下线后车辆需要开至四轮定位设备上进行前束调整检测,操作人员通过四轮定位测量数据使用扭矩扳手松开横拉杆螺母,再使用开口扳手对车辆横拉杆进行调整。
2、开口扳手调整横拉杆无法实现快速360度调整,操作人员需要反复取下开口扳手去对准需要调整的拉杆才能完成调整,导致调整速度慢且人员劳动强度大,且前束调整需要两名操作工上下同时进行,配合上存在较多等待浪费。
技术实现思路
1、本实用新型的目的在于提供一种扳手装置,该扳手装置能够自动驱动横拉杆连续转动,无需人工反复取下开口扳手去对准,提升了调节效率。
2、本实用新型的目的在于还提供一种前束调整装置。
3、本实用新型的目的在于还提供一种四轮定位系统。
4、为实现本实用新型目的,本实用新型采用如下技术方案:
5、根据本实用新型的一个方面,提供了一种扳手装置,包括驱动机构、安装部以及第一传动组件,第一传动组件安装于安装部上,传动组件包括与驱动机构连接的主动齿轮、与主动齿轮啮合的第一行星齿轮、与主动齿轮啮合的第二行星齿轮以及c形齿轮,第一行星齿轮和第二行星齿轮均与c形齿轮啮合,c形齿轮的内环面设置有用于转动螺栓的棱边,驱动机构通过主动齿轮、第一行星齿轮和第二行星齿轮驱动c形齿轮转动。
6、根据本实用新型的一实施方式,其中,安装部包括盒体和封闭盒体的盖体,第一传动组件安装于盒体内,盒体的一端开设有开口,c形齿轮位于盒体的一端部位置,在初始状态和工作结束时,c形齿轮的缺口与开口重合。
7、根据本实用新型的一实施方式,其中,盒体的一端面为弧形面。
8、根据本实用新型的一实施方式,其中,还包括限位组件,所述限位组件包括安装于所述安装部上的电磁部和可转动安装于所述安装部上的棘齿头,所述电磁部接电时,所述电磁部吸附所述棘齿头,所述电磁部断电时,所述棘齿头与所述主动齿轮啮合。
9、根据本实用新型的一实施方式,其中,还包括第二传动组件,第二传动组件的一端与驱动机构连接,第二传动组件的另一端与主动齿轮连接。
10、根据本实用新型的一实施方式,其中,驱动机构为伺服电机。
11、根据本实用新型的一实施方式,其中,还包括扭力传感器,所述扭力传感器与所述驱动机构的动力轴连接,以检测驱动机构的扭力。
12、根据本实用新型的第二个方面,提供了一种前束调整装置,包括至少一个机器人、安装座、d视觉相机、控制器以及至少一个上述的扳手装置,安装座和d视觉相机均安装于机器人上,扳手装置安装于安装座上,控制器电连接机器人、d视觉相机以及扳手装置。
13、机器人为两个,扳手装置相应为两个,两个扳手装置分别安装于两个机器人上。
14、安装座包括第一夹臂和第二夹臂,第二夹臂与第一夹臂可拆卸式连接,扳手装置被夹紧安装于第二夹臂与第一夹臂之间。
15、根据本实用新型的第三个方面,提供了一种四轮定位系统,包括上述的前束调整装置。
16、本实用新型中的一个实施例具有如下优点或有益效果:
17、本实用新型的一种扳手装置,可人工手持或设置在机器人机械臂上,将c形齿轮的缺口卡在前束拉杆上的螺栓上,驱动机构驱动主动齿轮转动,主动齿轮带动第一行星齿轮和第二行星齿轮转动,第一行星齿轮和第二行星齿轮带动c形齿轮连续转动,从而带动螺栓连续转动调节,无需人工反复取下开口扳手去对准,从而提升了调节效率,节省了人力。
技术特征:
1.一种扳手装置,其特征在于,包括:
2.根据权利要求1所述的扳手装置,其特征在于,所述安装部(2)包括盒体(21)和封闭所述盒体(21)的盖体(22),所述第一传动组件(3)安装于所述盒体(21)内,所述盒体(21)的一端开设有开口(211),所述c形齿轮(34)位于所述盒体(21)的一端部位置,在初始状态和工作结束时,所述c形齿轮(34)的缺口与所述开口(211)重合。
3.根据权利要求2所述的扳手装置,其特征在于,所述盒体(21)的一端面为弧形面。
4.根据权利要求1所述的扳手装置,其特征在于,还包括限位组件(4),所述限位组件(4)包括安装于所述安装部(2)上的电磁部(41)和可转动安装于所述安装部(2)上的棘齿头(42),所述电磁部(41)接电时,所述电磁部(41)吸附所述棘齿头(42),所述电磁部(41)断电时,所述棘齿头(42)与所述主动齿轮(31)啮合。
5.根据权利要求1所述的扳手装置,其特征在于,还包括第二传动组件(5),所述第二传动组件(5)的一端与所述驱动机构(1)连接,所述第二传动组件(5)的另一端与所述主动齿轮(31)连接。
6.根据权利要求1所述的扳手装置,其特征在于,所述驱动机构(1)为伺服电机。
7.根据权利要求6所述的扳手装置,其特征在于,还包括扭力传感器,所述扭力传感器与所述驱动机构(1)的动力轴连接,以检测驱动机构(1)的扭力。
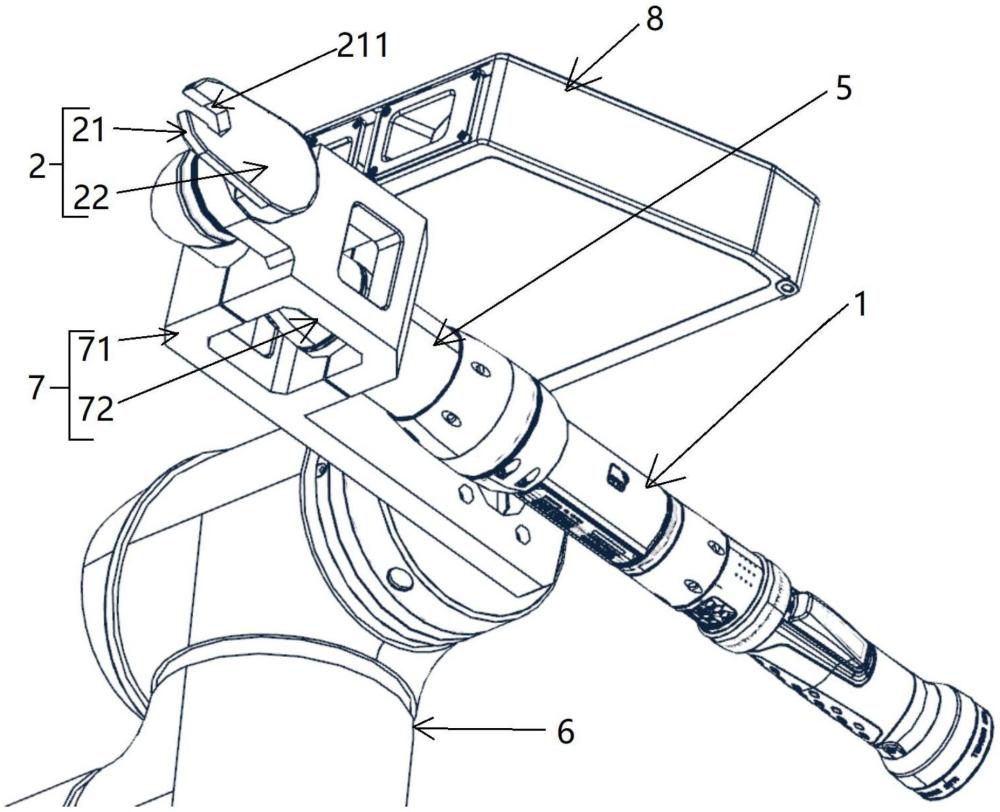
8.一种前束调整装置,其特征在于,包括至少一个机器人(6)、安装座(7)、3d视觉相机(8)、控制器以及至少一个权利要求1-7中任一项所述的扳手装置,所述安装座(7)和所述3d视觉相机(8)均安装于所述机器人(6)上,所述扳手装置安装于所述安装座(7)上,所述控制器电连接所述机器人(6)、所述3d视觉相机(8)以及所述扳手装置。
9.根据权利要求8所述的前束调整装置,其特征在于,所述机器人(6)为两个,所述扳手装置相应为两个,两个扳手装置分别安装于两个机器人(6)上。
10.一种四轮定位系统,其特征在于,包括权利要求8-9中任一项所述的前束调整装置。
技术总结
本技术提供了一种扳手装置、前束调整装置及四轮定位系统,属于汽车检测技术领域。该扳手装置包括驱动机构、安装部以及第一传动组件,第一传动组件安装于安装部上,传动组件包括与驱动机构连接的主动齿轮、与主动齿轮啮合的第一行星齿轮、与主动齿轮啮合的第二行星齿轮以及C形齿轮,第一行星齿轮和第二行星齿轮均与C形齿轮啮合,C形齿轮的内环面设置有用于转动螺栓的棱边,驱动机构通过主动齿轮、第一行星齿轮和第二行星齿轮驱动C形齿轮连续转动。
技术研发人员:黄靖,包超文,廖飞,李军辉,何奇
受保护的技术使用者:上汽通用五菱汽车股份有限公司
技术研发日:20230313
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!