一种外壳融合式轻量化机械臂关节的制作方法
本技术涉及机械臂,特别是涉及一种外壳融合式轻量化机械臂关节。
背景技术:
1、随着智能技术的发展,机械臂在越来越多的领域,替代以及协助人力执行工作。机械臂的应用场景很大程度上受限于其有限的扭矩和转速,提升扭矩和转速能够提升机械臂的处理性能和工作效率,对扭矩和转速的提升首先要解决的问题是关节发热的问题。cn215749262u中通过为机械臂安装散热装置实现机械臂的散热,其中散热装置包括散热盒,散热盒配置有内部槽、散热风扇和透气孔等部件,这种散热方式使得机械臂的结构复杂。
2、此外,机械臂关节的重量也是影响机械臂性能的关键因素,相对轻巧的机械臂更有利于提升机械臂的运行速度,传统增加散热结构的方式,虽然能改善机械臂关节的散热效果,但增加机械臂关节的结构负担和重量负担,不利于机械臂关节设计的轻量化,也将对机械臂性能有不利影响。
技术实现思路
1、本实用新型的目的在于提供一种外壳融合式轻量化机械臂关节,通过电机组件的外壳、谐波减速器组件的外壳和机械臂的关节外壳进行融合,能够使得电机外壳、谐波减速器外壳直接散热,改善了机械臂关节的散热问题,此外结构上简化了关节设计,有利于减轻关节重量,提升机械臂的工作节拍和使用寿命。
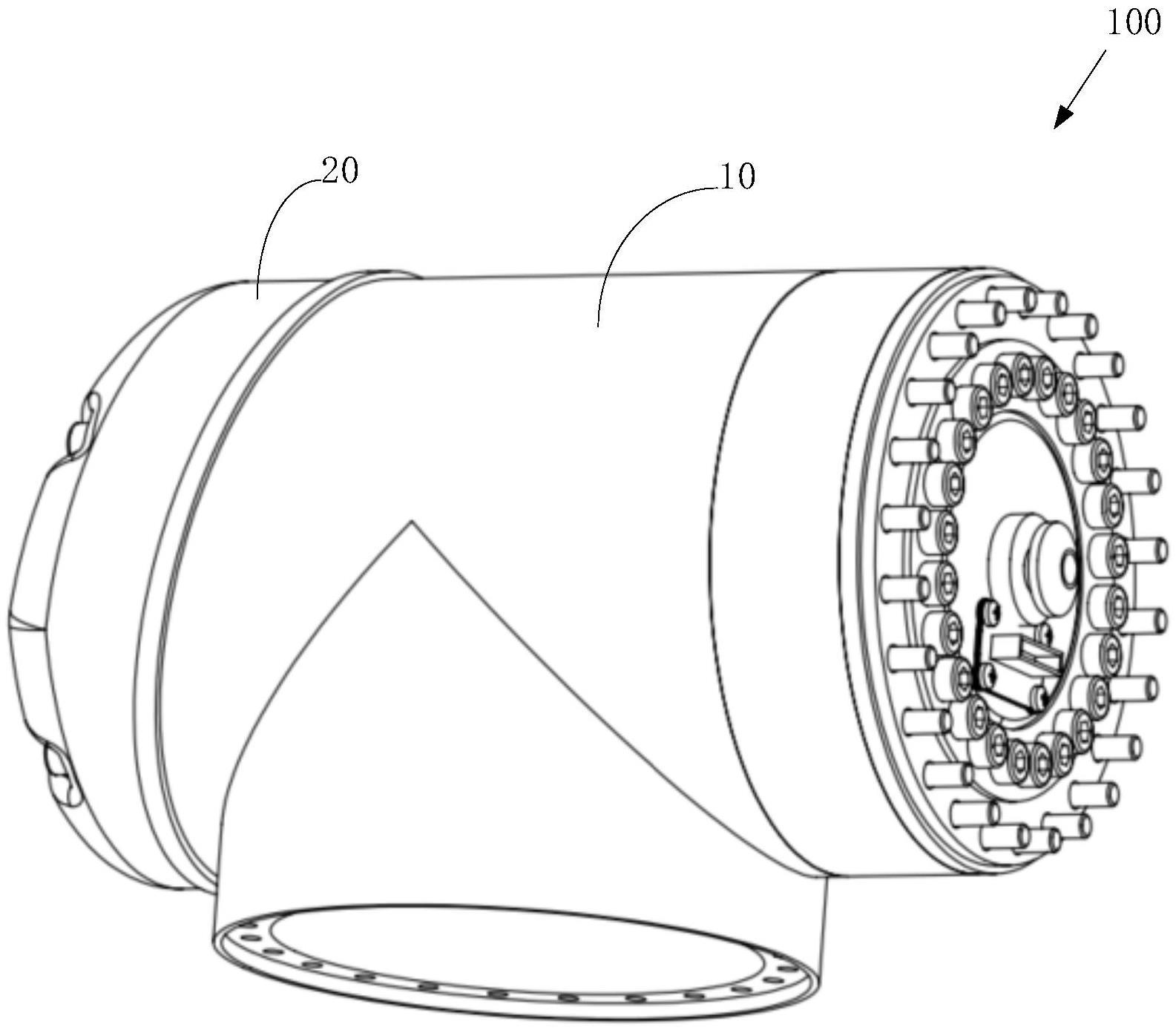
2、为解决上述技术问题,本实用新型可采用如下技术方案:一种外壳融合式轻量化机械臂关节,包括:壳体、电机组件和谐波减速器组件,所述壳体包括关节外壳和设置于关节外壳端部的关节端盖,所述关节外壳用作电机组件的外壳以使得电机组件的定子固定连接至关节外壳,所述关节外壳用作谐波减速器组件的外壳以使得谐波减速器组件的钢轮或柔轮固定连接于关节外壳。
3、进一步的,所述关节外壳包括第一外壳和第二外壳,所述第一外壳用作电机组件的外壳,所述第二外壳用作谐波减速器组件的外壳,所述第一外壳和第二外壳为一体式结构,或,所述第一外壳和第二外壳可分离地相连接。
4、进一步的,所述机械臂关节的端部设置交叉滚子轴承,所述交叉滚子轴承的一端固定于第二外壳,所述关节端盖固定于第一外壳。
5、进一步的,所述交叉滚子轴承的另一端固定柔性元件,所述柔性元件能够受力变形以使得机械臂关节具备柔性。
6、进一步的,所述电机组件包括电机后盖,所述电机后盖包括沿机械臂关节轴向延伸的若干连接柱,机械臂关节内部包括控制电路板,所述连接柱用于连接及固定所述控制电路板。
7、进一步的,所述定子和关节外壳可拆卸地连接。
8、进一步的,所述谐波减速器组件为轻量化谐波减速器组件。
9、与现有技术相比,本实用新型具体实施例的有益效果至少在于:1、将电机组件的外壳、谐波减速器组件的外壳与关节外壳融合,使得电机组件的外壳、谐波减速器组件的外壳直接散热,提升关节散热效果,从而能够提高机械臂的工作节拍和使用寿命;2、简化机械臂关节的壳体设计,减轻机械臂关节重量,有利于机械臂关节轻量化设计;3、机械臂关节配备柔性元件,机械臂具备柔性,为机械臂关节提供缓冲能力,提升机械臂运行的安全性。
技术特征:
1.一种外壳融合式轻量化机械臂关节,其特征在于,包括:
2.根据权利要求1所述的外壳融合式轻量化机械臂关节,其特征在于,所述关节外壳包括第一外壳和第二外壳,所述第一外壳用作电机组件的外壳,所述第二外壳用作谐波减速器组件的外壳,所述第一外壳和第二外壳为一体式结构,或,所述第一外壳和第二外壳可分离地相连接。
3.根据权利要求2所述的外壳融合式轻量化机械臂关节,其特征在于,所述机械臂关节的端部设置交叉滚子轴承,所述交叉滚子轴承的一端固定于第二外壳,所述关节端盖固定于第一外壳。
4.根据权利要求3所述的外壳融合式轻量化机械臂关节,其特征在于,所述交叉滚子轴承的另一端固定柔性元件,所述柔性元件能够受力变形以使得机械臂关节具备柔性。
5.根据权利要求1所述的外壳融合式轻量化机械臂关节,其特征在于,所述电机组件包括电机后盖,所述电机后盖包括沿机械臂关节轴向延伸的若干连接柱,机械臂关节内部包括控制电路板,所述连接柱用于连接及固定所述控制电路板。
6.根据权利要求1所述的外壳融合式轻量化机械臂关节,其特征在于,所述定子和关节外壳可拆卸地连接。
技术总结
本技术涉及一种外壳融合式轻量化机械臂关节,包括:壳体、电机组件和谐波减速器组件,所述壳体包括关节外壳和设置于关节外壳端部的关节端盖,所述关节外壳用作电机组件的外壳以使得电机组件的定子固定连接至关节外壳,所述关节外壳用作谐波减速器组件的外壳以使得谐波减速器组件的钢轮或柔轮固定于关节外壳。通过将电机组件的外壳和谐波减速器组件的外壳和关节外壳进行融合,能够简化机械臂关节的结构、降低关节重量、提升关节散热效果。
技术研发人员:孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!