一种药房机械臂抓取装置
本技术属于机械臂自动控制领域,特别涉及一种药房机械臂抓取装置。
背景技术:
1、随着现代医疗服务水平的提高和医药事业的不断发展,药房自动化系统纷纷走进各家医院,实现对药品的科学化、规范化、自动化管理已成为医药行业内的共识。而机械手臂是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分。机械手臂模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。针对药房药剂师取药任务繁重、效率低下,本实用新型设计了应用于医院的药房机械臂抓取装置。
技术实现思路
1、本实用新型是为了解决自动化药房缺乏合适的机械臂抓取药物的问题。本实用新型提出了一种药房机械臂抓取装置。
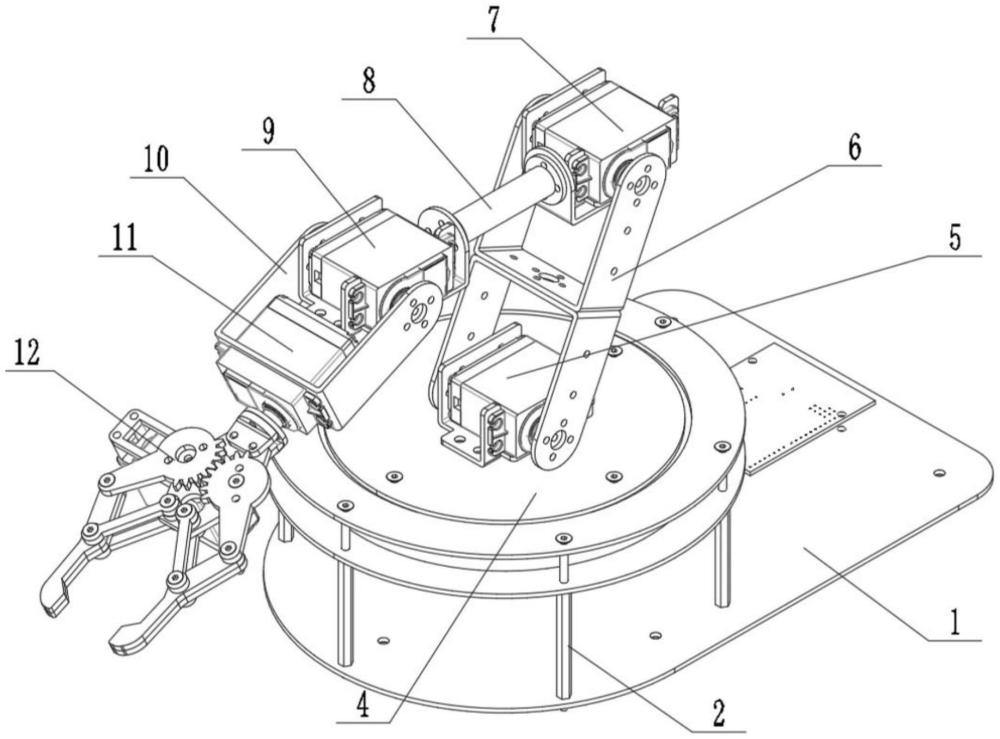
2、本实用新型的技术方案:主要包括底盘(1)、固定支架(2)、驱动杆(3)、运动平台(4)、驱动板(5)、安装支架(6)、步进电机(7)、连接轴(8)、舵机(9)、连接履带(10)、运动臂(11)和机械爪(12);底盘(1)和运动平台(4)通过固定支架(2)连接;驱动板(5)与驱动杆(3)固定连接,驱动板(5)通过安装支架(6)控制步进电机(7),步进电机(7)与舵机(9)通过连接轴(8)连接,舵机(9)通过连接履带(10)控制运动臂(11)和机械爪(12);
3、驱动板选用的是基于stm32单片机的舵机驱动,其中包括供电接口模块、舵机电压调节模块、控制板开关模块、过载保护模块和其他电源;驱动板具有8m的动作存储空间,pwm舵机为6路接口,总线舵机为2路,共可接8个舵机,本系统使用六个舵机;驱动板供电接口接在stm32单片机vdd1的32引脚,vdd1-vdd4均由vcc供电,供电范围为6.5-12v;舵机接口接在nrst的7号引脚,同时通过r14接入vcc,通过s1行程开关接入gnd,通过电容c23接入gnd,c23容量为100nf;舵机接口电压范围可调节,默认为6v,通过电位器可调节不同电压值以适应市场上不同品牌舵机的电压需求,顺时针旋转电位器增大舵机接口电压,反之减少电压;控制板开关接入stm32单片机pb5的57号引脚,控制的是供电接口电源接到板子上,拨到on接到板子使其工作,拨到off则切断供电,板子舵机停止工作;过载保护接入pa8的41号引脚,流经舵机接口的电源中加了2a保险丝,以确保舵机在堵转或者大电流情况下及时切断电源,以防止损坏舵机;其他电源可接入vss1-vss4接口,vss1-vss4接口与vssa共接gnd,电源接口板载为5.0v、3.3v方便接传感器其他模块时使用。
4、作为优选的是,舵机是一个微型的伺服控制系统,舵机的主体部分有:外壳、减速齿轮组、电机、电位器和控制电路;本实用新型中机械臂转轴转动选用六个舵机驱动,它可以通过接收控制信号从而输出一定的角度,适用于角度需要不断变化并保持稳定的控制系统;本实用新型中的舵机有三个引脚,分别是电源线、地线和控制线,以两两相对的方式与驱动板相连;舵机通过控制引脚接收控制信号,通过stm32单片机的定时器产生宽度可调的周期性脉冲信号,脉冲信号的周期为20ms,利用方波脉冲宽度的变化来改变舵机的输出转角;角度变化与脉冲宽度变化成正比,脉宽从0.5ms-2.5ms,分别对应-90°到+90°的位置从而带动机械手吸合,以此来完成机械臂抓取和放置的两个动作。
5、作为优选的是,关于舵机速度的控制,引用了位置pid算法,以下为该算法的程序:
6、velocityl=position_pid1(positionl,target1);
7、positionl+=velocity1;
8、tim4->ccr1=position1;
9、其中velocity1用于代表舵机的速度,其余参数为程序的常规参数;这个值根据目标值和舵机的实际位置计算得到,然后通过累积的方法,赋值给相关的寄存器作用到舵机;这样就把舵机的速度调节变成了pid参数大小的调节;另外,在接近目标位置的时候还可以实现减速,防止因为惯性的问题造成舵机齿轮减速箱的损坏。
10、作为优选的是,械臂的关节能够进行坐标变换,坐标系是根据dh法建立的;一般描述空间位置时大部分均适用于笛卡尔坐标系;在已知每个关节的姿态的前提下,解算出末端执行器的姿态即为正运动学分析,逆运动学是从正运动学反过来,对于机械臂而言,即已知末端执行器的位置和朝向,求每个关节的角度;机械臂的三维运动是比较复杂的,我们对模型进行精简,去掉下方云台的旋转关节,在二维的平面上进行运动学分析;其中l0,l1,l2为各关节之间的距离;θ1,θ2和θ3为各个关节的角度,未知量p(x,y,α)为末端执行器的位置,x和y为在oxy平面的两个坐标,α为末端执行器的朝向,由此可得以下方程:
11、x=l0cos1+l1cos(θ1+θ2)+l2cos(θ1+θ2+θ3) (1)
12、y=l0sinθ1+l1sin(θ1+θ2)+l2sin(θ1+θ2+θ3) (2)
13、α=θ1+θ2+θ3 (3)
14、完成逆运动学的计算可得出该模型的解。
15、本实用新型所述的一种药房机械臂抓取装置,该机械臂以stm32单片机作为主控芯片,通过动作预设由stm32微控制器编写的程序控制舵机配合的六自由度机械臂,实现在不同指令下运行不同动作对药物进行抓取,舵机运用pid算法,在接近目标位置的时候能够实现减速,防止因为惯性的问题造成舵机齿轮减速箱的损坏。
技术特征:
1.一种药房机械臂抓取装置,其特征在于,主要包括底盘(1)、固定支架(2)、驱动杆(3)、运动平台(4)、驱动板(5)、安装支架(6)、步进电机(7)、连接轴(8)、舵机(9)、连接履带(10)、运动臂(11)和机械爪(12);底盘(1)和 运动平台(4)通过固定支架(2)连接;驱动板(5)与驱动杆(3)固定连接,驱动板(5)通过安装支架(6)控制步进电机(7),步进电机(7)与舵机(9)通过连接轴(8)连接,舵机(9)通过连接履带(10)控制运动臂(11)和机械爪(12);
2.根据权利要求1所述的一种药房机械臂抓取装置,其特征在于,舵机是一个微型的伺服控制系统,舵机的主体部分有:外壳、减速齿轮组、电机、电位器和控制电路;机械臂转轴转动选用六个舵机驱动,它可以通过接收控制信号从而输出一定的角度,适用于角度需要不断变化并保持稳定的控制系统;舵机有三个引脚,分别是电源线、地线和控制线,以两两相对的方式与驱动板相连;舵机通过控制引脚接收控制信号,通过stm32单片机的定时器产生宽度可调的周期性脉冲信号,脉冲信号的周期为20ms,利用方波脉冲宽度的变化来改变舵机的输出转角;角度变化与脉冲宽度变化成正比,脉宽从0.5ms-2.5ms,分别对应-90°到+90°的位置从而带动机械手吸合,以此来完成机械臂抓取和放置的两个动作。
技术总结
一种药房机械臂抓取装置,涉及机械臂自动控制领域。本技术是为了解决自动化药房缺乏合适的机械臂抓取药物的问题。本技术所述的一种药房机械臂抓取装置,该机械臂以STM32单片机作为主控芯片,通过动作预设由STM32微控制器控制舵机机械臂,实现在不同指令下运行不同动作对药物进行抓取,解决了自动化药房缺乏合适的机械臂抓取药物的问题。其中舵机运用PID算法,在接近目标位置的时候能够实现减速,防止因为惯性的问题造成舵机齿轮减速箱的损坏。本技术在基于医院信息系统的自动化药房领域有重要作用。
技术研发人员:傅丽云,张轶晨,陈俊铭,蔡婷婷,孙春容,陈叶栋
受保护的技术使用者:温州医科大学
技术研发日:20230315
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!