一种机器人末端抱夹机械手的制作方法
本技术涉及一种机器人末端抱夹机械手,属于机器人。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序爪取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,还能在有害环境下操作以保护人身安全,因而得到广泛应用。
2、机器人搬运工件需要设计各种不同的夹爪,对于圆柱形较长零件的夹取,现有技术中缺少用于搬运圆杆形零件的专业夹爪,只能使用简单的平面形夹爪夹取圆杆形零件,夹取效率低,夹取安全性、稳定性差。
3、申请号为cn202020947327.0的中国实用新型专利公开了一种用于机械手的圆柱工件夹紧装置,包括“t”形的导向座,导向座的纵向臂上设置第一导向块,导向座的横向臂的左右延伸端分别设置第二导向块、第三导向块,第二、三导向块的中轴延长线分别与第一导向块的中轴延长线呈60度角,第一导向块上滑动配合第一夹紧臂,第二导向块上滑动配合第二夹紧臂,第三导向块上滑动配合第三夹紧臂,第一夹紧臂左、右侧分别设置齿条,第二、三夹紧臂与第一夹紧臂相向一侧均设有齿条,第一夹紧臂的齿条分别通过过桥齿轮与第二、三夹紧臂的齿条啮合,第一夹紧臂、第二夹紧臂、第三夹紧臂夹紧头呈正三角形分布,各夹紧头的夹持部中心点位于同一水平面,第一夹紧臂与一驱动装置的活塞杆固定连接。上述技术方案中存在夹放圆柱形零件效率低,安全性、稳定性差的问题。
技术实现思路
1、本实用新型的目的在于针对上述现有技术中存在的夹取效率低,夹取安全性、稳定性差的技术问题,提供一种机器人末端抱夹机械手。
2、本实用新型是通过以下技术方案实现的:
3、即一种机器人末端抱夹机械手,包括门形架,门形架上端设有与机器人连接的机器人连接件,门形架底面上设有导轨,导轨上滑动安装有两个滑块,滑块下端固定设有移动架,移动架下部内侧面上固定设有夹紧支架,夹紧支架的两端分别固定设有第一抱爪和第二抱爪,穿过两个移动架安装有正反向丝杠,正反向丝杠两端安装在门形架的立板上,正反向丝杠一端安装有伺服电机。
4、伺服电机通过丝杠螺母机构驱动改变两个移动架之间的距离,即调节第一抱爪、第二抱爪夹紧或松脱,从而实现对圆柱形零件的夹放,第一抱爪、第二抱爪均包括两对架爪。本实用新型夹取圆柱形零件效率高,夹取安全性、稳定性高。
5、本实用新型的进一步改进还有,夹紧支架的一端内侧固定设有限位板。圆柱形零件夹装在第一抱爪、第二抱爪内,限位板起到限位圆柱形零件,防止零件滑脱,有助于提高安全性。
6、本实用新型的进一步改进还有,第一抱爪、第二抱爪位于夹紧支架两端内侧,第一抱爪、第二抱爪的内侧面均为平面设计。
7、本实用新型的进一步改进还有,第一抱爪、第二抱爪位于夹紧支架两端内侧,第一抱爪的内侧面为平面设计,第二抱爪为弧形结构。第二抱爪为弧形结构,有助于提高本实用新型夹取零件的安全性和稳定性。
8、本实用新型的进一步改进还有,夹紧支架一端与移动架平齐设置,第一抱爪、第二抱爪位于夹紧支架两端内侧。夹紧支架位于门形架的一侧,方便本实用新型夹取零件。
9、本实用新型的进一步改进还有,正反向丝杠上螺纹的旋向以中间为界左右相反。
10、与现有技术相比,本实用新型所具有的有益效果是:
11、伺服电机通过丝杠螺母机构驱动改变两个移动架之间的距离,即调节第一抱爪、第二抱爪夹紧或松脱,从而实现对圆柱形零件的夹放,第一抱爪、第二抱爪均包括两对架爪。本实用新型夹取圆柱形零件效率高,夹取安全性、稳定性高。
技术特征:
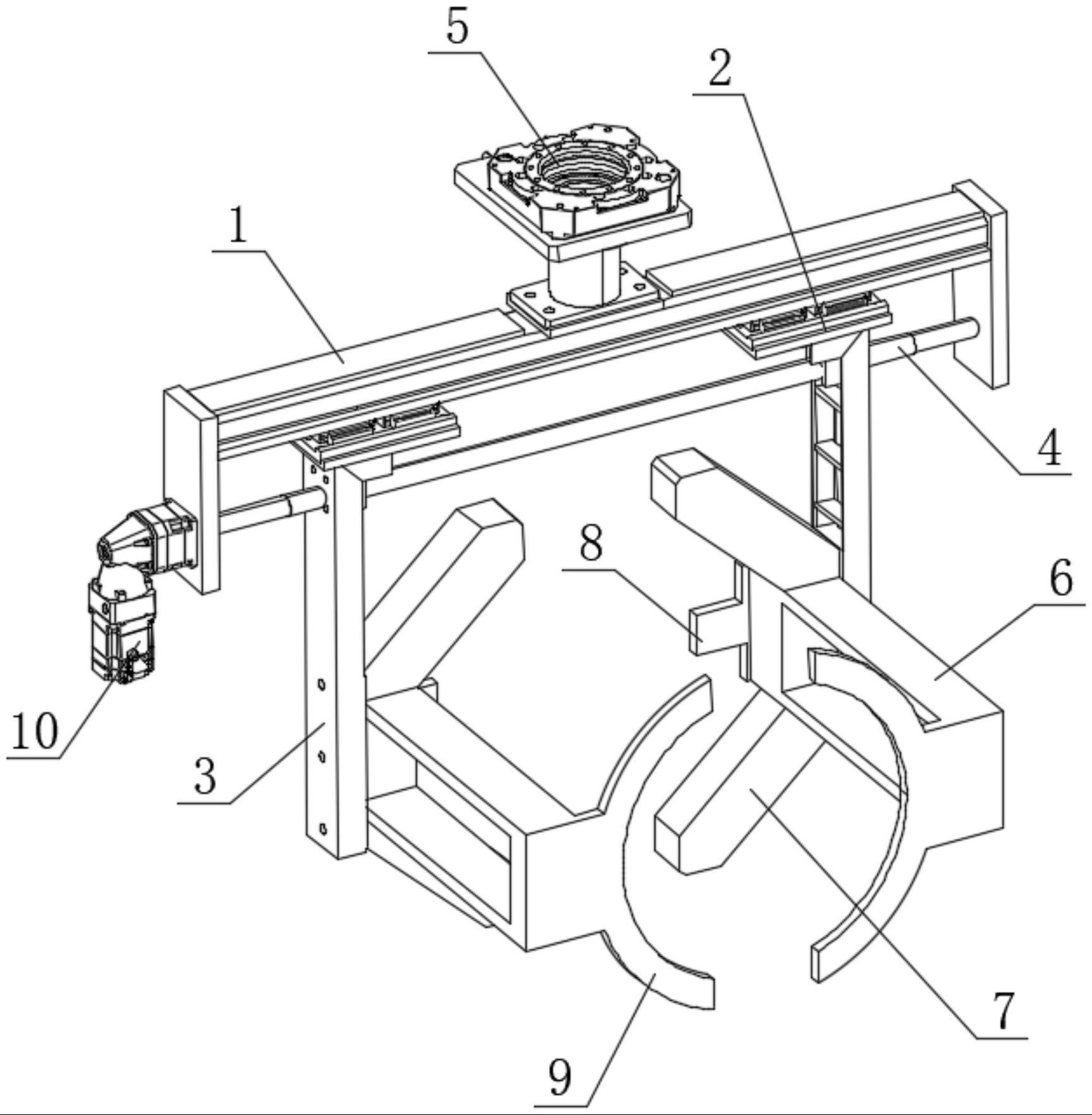
1.一种机器人末端抱夹机械手,包括门形架(1),其特征在于,门形架(1)上端设有与机器人连接的机器人连接件(5),门形架(1)底面上设有导轨(11),导轨(11)上滑动安装有两个滑块(2),滑块(2)下端固定设有移动架(3),移动架(3)下部内侧面上固定设有夹紧支架(6),夹紧支架(6)的两端分别固定设有第一抱爪(7)和第二抱爪(9),穿过两个移动架(3)安装有正反向丝杠(4),正反向丝杠(4)两端安装在门形架(1)的立板上,正反向丝杠(4)一端安装有伺服电机(10)。
2.根据权利要求1所述的一种机器人末端抱夹机械手,其特征在于,夹紧支架(6)的一端内侧固定设有限位板(8)。
3.根据权利要求1所述的一种机器人末端抱夹机械手,其特征在于,第一抱爪(7)、第二抱爪(9)位于夹紧支架(6)两端内侧,第一抱爪(7)、第二抱爪(9)的内侧面均为平面设计。
4.根据权利要求1所述的一种机器人末端抱夹机械手,其特征在于,第一抱爪(7)、第二抱爪(9)位于夹紧支架(6)两端内侧,第一抱爪(7)的内侧面为平面设计,第二抱爪(9)为弧形结构。
5.根据权利要求3或4所述的一种机器人末端抱夹机械手,其特征在于,夹紧支架(6)一端与移动架(3)平齐设置。
6.根据权利要求1所述的一种机器人末端抱夹机械手,其特征在于,正反向丝杠(4)上螺纹的旋向以中间为界左右相反。
技术总结
本技术涉及一种机器人末端抱夹机械手,属于机器人技术领域,包括门形架,门形架上端设有与机器人连接的机器人连接件,门形架底面上设有导轨,导轨上滑动安装有两个滑块,滑块下端固定设有移动架,移动架下部内侧面上固定设有夹紧支架,夹紧支架的两端分别固定设有第一抱爪和第二抱爪,穿过两个移动架安装有正反向丝杠,正反向丝杠两端安装在门形架的立板上,正反向丝杠一端安装有伺服电机。伺服电机通过丝杠螺母机构驱动改变两个移动架之间的距离,即调节第一抱爪、第二抱爪夹紧或松脱,从而实现对圆柱形零件的夹放,第一抱爪、第二抱爪均包括两对架爪。本技术夹取圆柱形零件效率高,夹取安全性、稳定性高。
技术研发人员:王晓昌,阴俊红,景年强,张国
受保护的技术使用者:山东精卓科技有限公司
技术研发日:20230310
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!