电池抓取装置的制作方法
本公开涉及汽车新能源设备,尤其涉及一种电池抓取装置。
背景技术:
1、随着新能源汽车的蓬勃发展,作为新能源汽车核心部件之一的电池包(pack)的需求量也逐步增大。相关技术中,一般通过抓取装置抓取并转移电池模组,以将数量、类型相同/不同的电池模组装配至电池箱体中,以获得所需电池包。抓取过程中,抓取装置的夹爪快速朝向电池模组移动,使得其在接触电池模组时具有一定速度。当夹爪接触电池模组时,具有速度和重量的夹爪会冲击/撞击电池模组,影响电池模组的性能,降低电池包产品的良品率。同时,电池模组反馈给夹爪的反向力,加快了电池抓取装置的使用磨损,缩短了电池抓取装置的使用寿命。
技术实现思路
1、本公开提供了一种电池抓取装置,以解决传统电池抓取装置抓取电池模组时产生的冲击力/撞击力而造成电池包良品率低、电池抓取装置使用寿命短的技术问题。
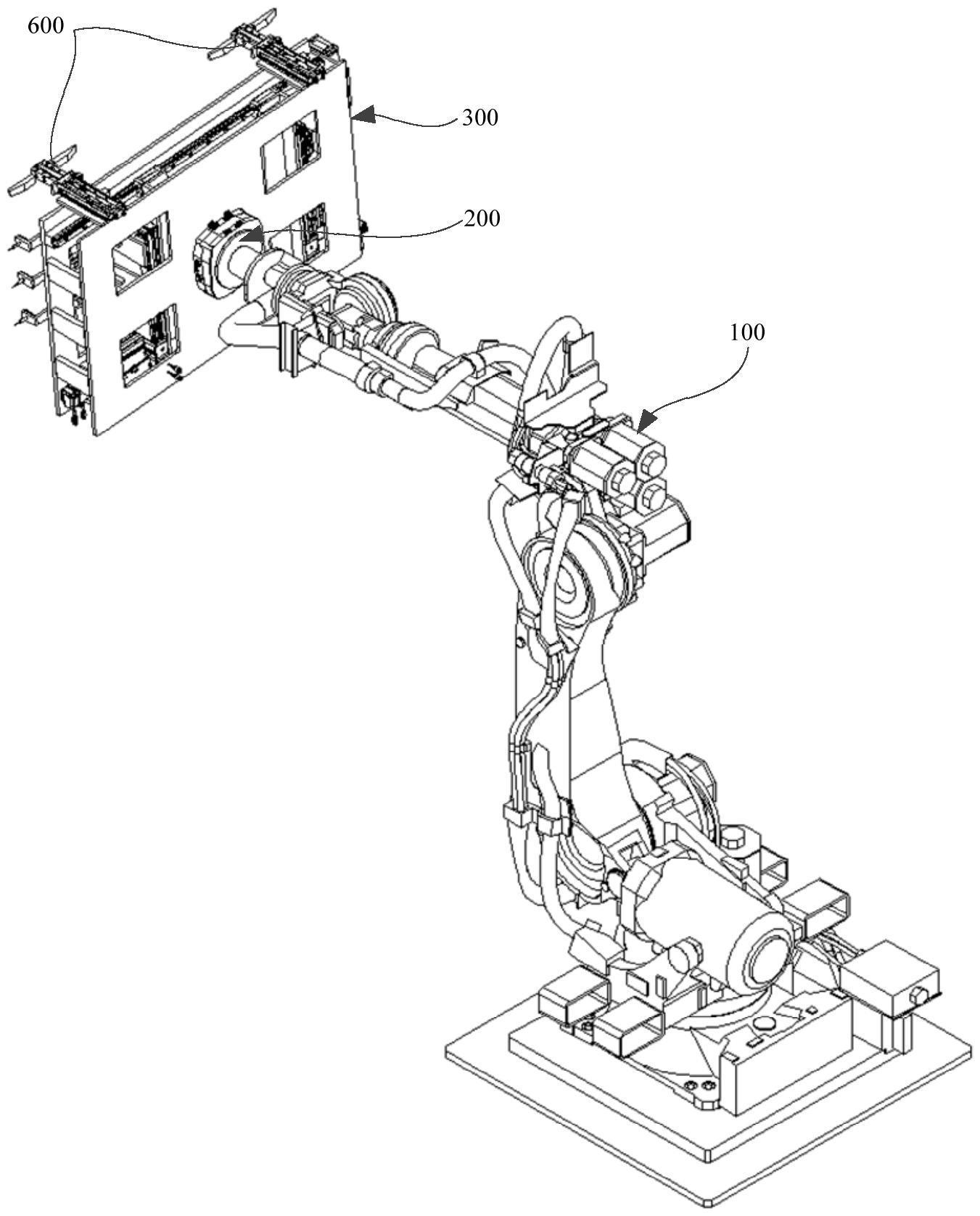
2、为此,本公开提供了一种电池抓取装置,包括机器人、浮动组件及抓取机构,抓取机构通过浮动组件活动连接于机器人;其中,抓取机构包括:
3、底座,连接于浮动组件;
4、驱动组件,设于底座背向浮动组件的一侧;以及
5、夹爪结构,连接于驱动组件的输出端;驱动组件驱动夹爪结构沿底座的长度方向和/或宽度方向移动。
6、在一种可能的实施方式中,夹爪结构包括:
7、第一连接件,连接于底座;
8、第一夹爪,设于第一连接件远离底座的一端;以及
9、弹性件,设于第一夹爪和第一连接件之间,弹性件用于给第一夹爪提供一沿底座的厚度方向的缓冲力。
10、在一种可能的实施方式中,第一夹爪包括第一夹臂、第二夹臂及第一驱动件,第一夹臂和第二夹臂均连接于第一驱动件的输出端,第一驱动件用于驱动第一夹臂和第二夹臂在底座的长度方向相靠近或相远离。
11、在一种可能的实施方式中,夹爪结构还包括绝缘件,绝缘件设于第一夹爪,用于增大第一夹爪与电池模组之间的摩擦力;和/或,
12、夹爪结构还包括第一检测件,第一检测件设于第一夹爪,用于检测第一夹爪是否夹紧电池模组。
13、在一种可能的实施方式中,底座包括第二连接件、第三连接件及多个支撑件,第一连接件和第二连接件间隔设置,支撑件设于第二连接件和第三连接件之间,以在第二连接件和第三连接件之间形成安装空间,多个支撑件间隔分布于第二连接件和第三连接件的周缘;
14、浮动组件连接于第三连接件;驱动组件设于第三连接件,且位于安装空间。
15、在一种可能的实施方式中,底座还包括固定轨道和活动轨道,固定轨道设于第三连接件上,且沿底座的长度方向延伸;活动轨道活动设于固定轨道朝向第二连接件的一侧,活动轨道沿底座的宽度方向延伸;
16、夹爪结构活动设于活动轨道远离第二连接件的一侧,驱动组件用于驱动活动轨道沿底座的长度方向往复移动、以及用于驱动夹爪机构沿底座的宽度方向往复移动。
17、在一种可能的实施方式中,驱动组件包括第二驱动件和第三驱动件,第二驱动件设于第三连接件,用于驱动活动轨道;第三驱动件设于活动轨道,用于驱动夹爪结构。
18、在一种可能的实施方式中,第二连接件上设有减重孔。
19、在一种可能的实施方式中,电池抓取装置还包括第二检测件,第二检测件设于底座,用于检测电池模组的位置信息;和/或,
20、电池抓取装置还包括第三检测件,第三检测件设于底座,用于检测是否存在电池模组。
21、在一种可能的实施方式中,电池抓取装置还包括第二夹爪,第二夹爪设于底座,用于夹取电池箱体。
22、根据本公开提供的电池抓取装置,包括机器人、浮动组件及抓取机构,抓取机构通过浮动组件活动连接于机器人;其中,抓取机构包括:底座,连接于浮动组件;驱动组件,设于底座背向浮动组件的一侧;以及夹爪结构,连接于驱动组件的输出端;驱动组件驱动夹爪结构沿底座的长度方向和/或宽度方向移动。本公开技术方案,通过优化电池抓取装置的具体结构,减少抓取动作时电池模组对电池抓取装置的反向冲击力/撞击力,提高电池抓取装置的使用寿命;同时,避免抓取动作时电池抓取装置对电池模组的冲击/撞击,减小电池模组的机械损伤/损坏,提高电池包的良品率。具体而言,将电池抓取装置配置为至少包括机器人、浮动组件及抓取机构的组合构件,该抓取机构通过浮动组件浮动连接于机器人上,该机器人用于将抓取机构移送至指定位置,该浮动组件用于给抓取机构提供一浮动组件和抓取机构连接方向上的缓冲力,避免抓取机构刚性抓取电池模组,在抓取机构和电池模组之间形成严重冲击/撞击。并且,将抓取机构配置为至少包括底座、驱动组件及夹爪结构的组合构件,该底座浮动连接于浮动组件上,该驱动组件连接于底座上,该夹爪结构连接于驱动组件的输出端。如此,拟通过机器人将抓取机构移送至放置电池模组的指定位置,然后通过驱动组件驱动夹爪结构进一步运动,执行夹取电池模组的抓取动作,当带有一定速度和重量的夹爪结构接触电池模组时,通过浮动组件缓释电池模组对抓取机构的反向冲击力/撞击力,从而减小夹爪结构与电池模组之间的刚性应力,提高电池包的良品率,同时提高电池抓取装置的使用寿命。
技术特征:
1.一种电池抓取装置,其特征在于,包括机器人、浮动组件及抓取机构,所述抓取机构通过所述浮动组件活动连接于所述机器人;其中,所述抓取机构包括:
2.根据权利要求1所述的电池抓取装置,其特征在于,所述夹爪结构包括:
3.根据权利要求2所述的电池抓取装置,其特征在于,所述第一夹爪包括第一夹臂、第二夹臂及第一驱动件,所述第一夹臂和所述第二夹臂均连接于所述第一驱动件的输出端,所述第一驱动件用于驱动所述第一夹臂和所述第二夹臂在所述底座的长度方向相靠近或相远离。
4.根据权利要求2所述的电池抓取装置,其特征在于,所述夹爪结构还包括绝缘件,所述绝缘件设于所述第一夹爪,用于增大所述第一夹爪与电池模组之间的摩擦力;和/或,
5.根据权利要求1所述的电池抓取装置,其特征在于,所述底座包括第二连接件、第三连接件及多个支撑件,所述第二连接件和所述第三连接件间隔设置,所述支撑件设于所述第二连接件和所述第三连接件之间,以在所述第二连接件和所述第三连接件之间形成安装空间,多个所述支撑件间隔分布于所述第二连接件和所述第三连接件的周缘;
6.根据权利要求5所述的电池抓取装置,其特征在于,所述底座还包括固定轨道和活动轨道,所述固定轨道设于所述第三连接件上,且沿所述底座的长度方向延伸;所述活动轨道活动设于所述固定轨道朝向第二连接件的一侧,所述活动轨道沿所述底座的宽度方向延伸;
7.根据权利要求6所述的电池抓取装置,其特征在于,所述驱动组件包括第二驱动件和第三驱动件,所述第二驱动件设于所述第三连接件,用于驱动所述活动轨道;所述第三驱动件设于所述活动轨道,用于驱动所述夹爪结构。
8.根据权利要求5所述的电池抓取装置,其特征在于,所述第二连接件上设有减重孔。
9.根据权利要求1所述的电池抓取装置,其特征在于,所述电池抓取装置还包括第二检测件,所述第二检测件设于所述底座,用于检测电池模组的位置信息;和/或,
10.根据权利要求1所述的电池抓取装置,其特征在于,所述电池抓取装置还包括第二夹爪,所述第二夹爪设于所述底座,用于夹取电池箱体。
技术总结
本公开涉及一种电池抓取装置,包括机器人、浮动组件及抓取机构,抓取机构通过浮动组件活动连接于机器人;其中,抓取机构包括:底座,连接于浮动组件;驱动组件,设于底座背向浮动组件的一侧;以及夹爪结构,连接于驱动组件的输出端;驱动组件驱动夹爪结构沿底座的长度方向和/或宽度方向移动。本公开技术方案有效解决了传统电池抓取装置抓取电池模组时产生的冲击力/撞击力而造成电池包良品率低、电池抓取装置使用寿命短的技术问题。
技术研发人员:杨晓丽,董豪,陈金桥,朱丹
受保护的技术使用者:重庆赛昇智能科技研究院有限公司
技术研发日:20230315
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!