一种输送机械手臂的制作方法
本技术属于机械手臂,具体的说是一种输送机械手臂。
背景技术:
1、工业机器人是我国近年来发展的自动化生产设备,其中输送机械手臂尤为突出,它可以根据特有的编程来完成各种工作,进而兼顾了人类与机器的优点,使用与较多的工作环境;
2、在一些工人不方便进行工作的环境中,一般都会选择使用输送机器人来对产品或包装进行运输,进而在不浪费人工的情况下,使工作能够正常的进行;
3、但是在现有的输送机械手臂在工作时,在对质量较重的产品进行输送时,其机械手爪会因为对产品的夹持不紧而使产品掉落的情况出现,进而在产品掉落时,可能会对产品造成损伤,进而造成资源的浪费;
4、为此,本实用新型提供一种输送机械手臂。
技术实现思路
1、为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种输送机械手臂,包括机械手爪,所述机械手爪中部转动连接有转轴;其特征在于:所述转轴在机械手爪中部设有多组;所述转轴中部固接有压板;所述转轴中部固接有限位条;所述压板与限位条相互垂直设置;所述转轴中部开设有空腔。所述限位条端部固接有固位板;所述固位板中部固接有支柱;所述支柱在固位板中部设有多组;所述支柱端部固接有吸盘。
3、优选的,所述空腔内部开设有圆孔;所述圆孔内部固接有弹簧;所述弹簧端部固接有橡胶垫。
4、优选的,所述机械手爪表面固接有防滑条;所述机械手爪表面固接有防滑垫。
5、优选的,所述机械手爪中部设有伸缩板;所述伸缩板与机械手爪固定连接。
6、优选的,所述机械手爪固接有伸缩杆;所述伸缩杆端部设有顶板。
7、本实用新型的有益效果如下:
8、1.本实用新型所述的一种输送机械手臂,此步骤可在使用机械手爪对产品进行抓取时,通过限位条对产品的侧面进行包裹,进而当需要抓取的产品质量过重时,减少产品从机械手爪内部掉落的情况出现,进而在对产品进行输送过程中,减少产品从机械手爪内部掉落的情况出现,进而对产品进行保护,减少输送过程中资源的浪费。
9、2.本实用新型所述的一种输送机械手臂,此步骤可在使用固位板对产品进行固定时,通过的吸附作用,增加产品与固位板连接的紧固性,进而在使用机械手爪对产品进行抓取输送时,减少其掉落的情况出现,进而对产品进行保护,减少输送过程中资源的浪费。
技术特征:
1.一种输送机械手臂,包括:机械手爪(1),机械手爪(1)的中部转动连接有转轴(11);其特征在于:所述的转轴(11)在机械手爪(1)的中部设有多组;所述转轴(11)的中部固接有压板(12)和限位条(13),并且,所述的压板(12)与限位条(13)相互垂直设置;所述转轴(11)的中部开设有空腔(14),所述限位条(13)的端部固接有固位板(2);所述固位板(2)的中部固接有支柱(21);所述的支柱(21)在固位板(2)的中部设置有多组;所述支柱(21)的端部固接有吸盘(22)。
2.根据权利要求1所述的一种输送机械手臂,其特征在于:所述空腔(14)内部开设有圆孔(3);所述圆孔(3)内部固接有弹簧(31);所述弹簧(31)端部固接有橡胶垫(32)。
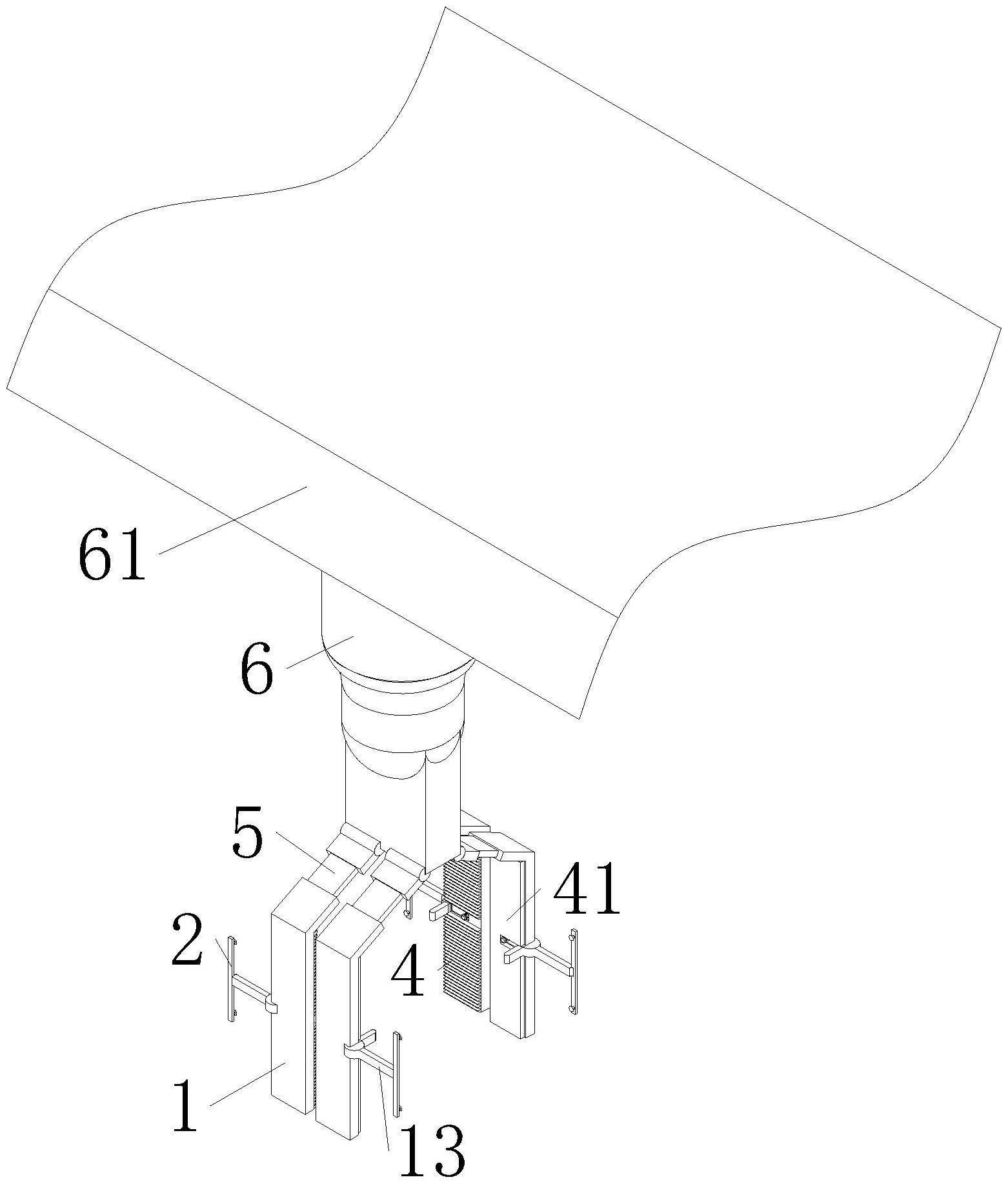
3.根据权利要求1所述的一种输送机械手臂,其特征在于:所述机械手爪(1)的表面固接有防滑条(4);所述机械手爪(1)的表面固接有防滑垫(41)。
4.根据权利要求1所述的一种输送机械手臂,其特征在于:所述机械手爪(1)的中部设置有伸缩板(5);所述的伸缩板(5)与机械手爪(1)固定连接。
5.根据权利要求1至4中任一项所述的一种输送机械手臂,其特征在于:所述的机械手爪(1)固接有伸缩杆(6);所述伸缩杆(6)的端部设置有顶板(61)。
技术总结
本技术属于机械手臂技术领域,具体的说是一种输送机械手臂,所述机械手爪中部转动连接有转轴;其特征在于:所述转轴在机械手爪中部设有多组;所述转轴中部固接有压板;所述转轴中部固接有限位条;所述压板与限位条相互垂直设置;所述转轴中部开设有空腔;此步骤可在使用机械手爪对产品进行抓取时,通过限位条对产品的侧面进行包裹,进而当需要抓取的产品质量过重时,减少产品从机械手爪内部掉落的情况出现,进而在对产品进行输送过程中,减少产品从机械手爪内部掉落的情况出现,进而对产品进行保护,减少输送过程中资源的浪费。
技术研发人员:徐雁赟,闫志历,张伟佳,郭俊超,陆浩南,田毅,高斐斐
受保护的技术使用者:江苏恩利科智能制造有限公司
技术研发日:20230320
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!