一种舞蹈机器人的动作执行末端
本技术涉及机器人智能制造,具体涉及一种舞蹈机器人的动作执行末端。
背景技术:
1、随着科技的不断发展,机器人的功能也越来越丰富,有的机器人能提高工业生产效率,有的机器人则具备娱乐功能,例如舞蹈机器人。
2、公开号为cn203473047u的中国实用新型专利公开了一种多自由度的仿人舞蹈机器人,解决现有舞蹈机器人由于可动关节较少,不能很好的模仿人的舞蹈动作的问题。该舞蹈机器人的两个第一舵机并排平行安装在机器人主体的胸部上,机器人主体每个腿的上端分别各安装一个第二舵机,机器人主体每个手臂的上臂分别各安装一个第三舵机,机器人主体每个手臂的下臂分别各安装一个第四舵机,机器人主体每条腿的大腿上分别各安装一个第五舵机,机器人主体每条腿的膝关节处分别各安装一个第六舵机,机器人主体每条腿的小腿上分别各安装一个第七舵机,机器人主体每只脚上分别各安装一个第八舵机。
3、但是,该型舞蹈机器人在舞蹈过程中手部是一体的固定结构,无法活动,不能配合舞蹈动作进行相应的手部细节动作展示,制约了舞蹈机器人进行舞蹈表演时的表现力和感染力。
技术实现思路
1、针对现有技术中的缺陷,本实用新型提供一种舞蹈机器人的动作执行末端,以解决背景技术中所提出的技术问题。
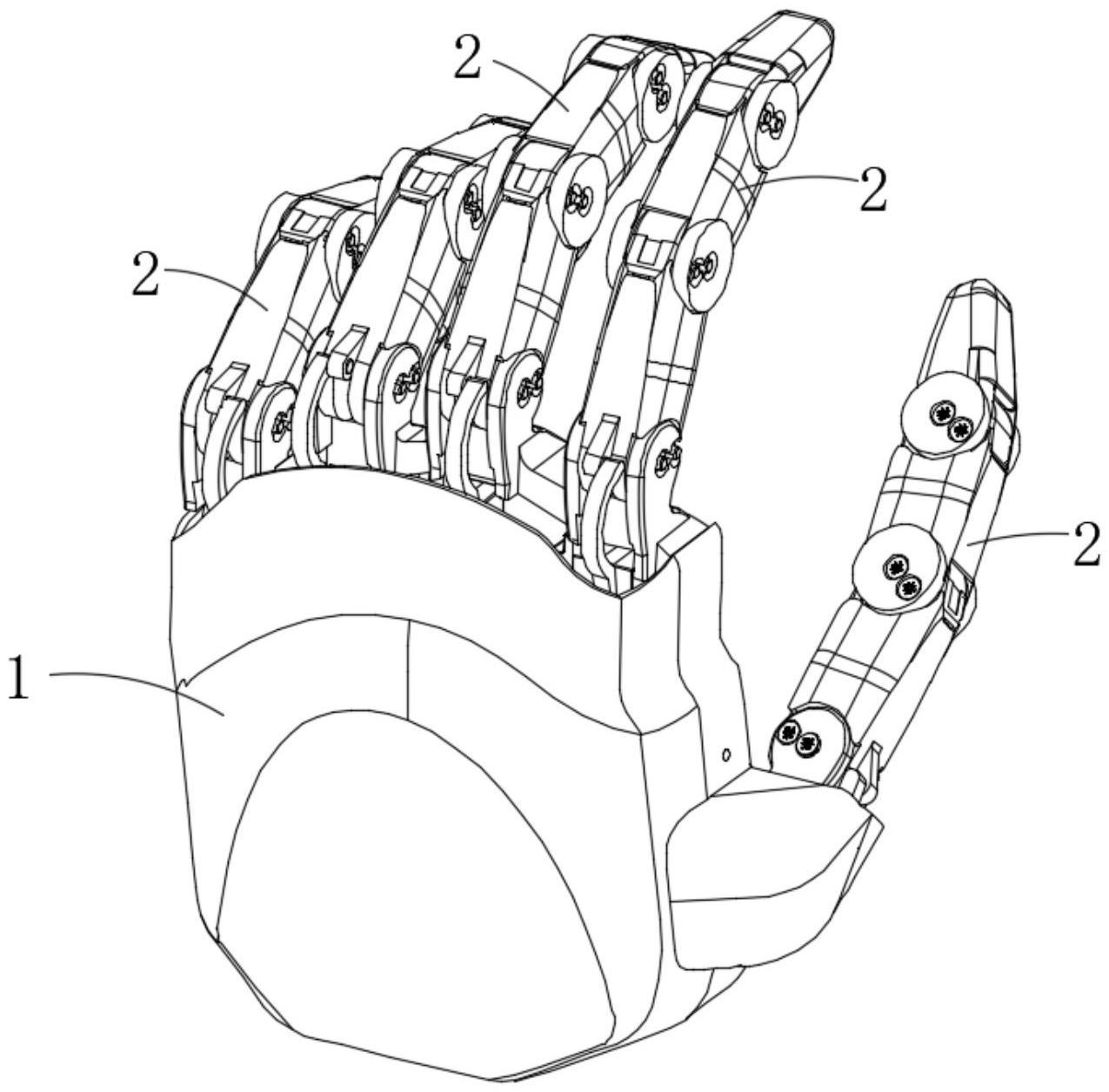
2、一种舞蹈机器人的动作执行末端,包括手掌机构和设置在所述手掌机构上的五个手指机构,所述手掌机构和五个所述手指机构构成仿真手模型结构;其中,
3、所述手掌机构包括相对扣合设置的内侧板和外侧板,所述内侧板和外侧板之间间隔形成安装腔;
4、所述手指机构包括三根依次铰接的手指近节、手指中节和手指末节以及用于驱动所述手指近节、手指中节和手指末节活动的驱动组件,所述手指近节铰接在所述内侧板上;所述驱动组件包括驱动模块和多根连杆,所述驱动组件设置在所述安装腔内,所述驱动组件与手指近节之间以及相邻两根指节之间均通过所述连杆传动连接。
5、进一步,所述内侧板顶端设置有铰接座,所述铰接座上具有第一连接槽;
6、所述手指近节的一端具有通过第一销轴铰接在所述第一连接槽内的第一连接部,所述第一连接部上开设有第一弧形槽,所述第一弧形槽与所述第一销轴同心设置;所述第一连接部内还穿设有第二销轴,所述第二销轴穿过所述第一弧形槽设置,所述手指近节和手指中节之间的连杆的一端转动套设在所述第二销轴上;
7、所述第一连接部的顶部设置有与连杆连接的传动部,所述驱动组件与手指近节之间的连杆的一端通过第三销轴转动连接在所述传动部上、另一端转动连接在所述驱动组件上。
8、进一步,所述手指近节的另一端上设置有第二连接部,所述第二连接部上设置有第二弧形槽;
9、所述手指中节的一端具有通过第四销轴与所述第二连接部转动连接的第二连接槽,所述第二弧形槽内活动穿设有第五销轴,所述第五销轴的两端从所述第二连接槽两侧向外穿出;
10、所述手指近节和手指中节之间的连杆的另一端转动套设在所述第五销轴上。
11、进一步,所述手指中节的另一端设置有第三连接部,所述第三连接部上设置有第三弧形槽;
12、所述手指末节的一端具有通过第六销轴与所述第三连接部转动连接的第三连接槽,所述第二弧形槽内活动穿设有第七销轴,所述第七销轴的两端从所述第三连接槽两侧向外穿出;
13、所述手指中节与手指末节之间的连杆的一端转动套设在所述第七销轴上、另一端转动连接有第八销轴,所述第八销轴固定连接在所述第二连接部内。
14、进一步,所述手指近节和手指中节上均具有沿轴线延伸的安装槽,所述连杆位于所述安装槽内设置。
15、进一步,所述驱动组件包括驱动单元和安装在所述驱动单元上的传动件,所述驱动单元固定安装在所述内侧板内壁上,所述传动件与所述连杆通过第九销轴转动连接。
16、进一步,所述驱动单元为伺服电机或伺服舵机。
17、进一步,所述内侧板内壁上设置有固定柱,所述驱动单元固定安装在所述固定柱内。
18、本实用新型的有益效果体现在:
19、每根手指通过独立的驱动单元驱动,使舞蹈机器人在跳舞时可以完成更多和更细腻的手部动作,极大的拓展了舞蹈机器人的舞蹈功能,丰富了舞蹈机器人的舞蹈动作,舞蹈机器人进行舞蹈表演时更具有表现力和感染力。
技术特征:
1.一种舞蹈机器人的动作执行末端,其特征在于:包括手掌机构(1)和设置在所述手掌机构(1)上的五个手指机构(2),所述手掌机构(1)和五个所述手指机构(2)构成仿真手模型结构;其中,
2.根据权利要求1所述的一种舞蹈机器人的动作执行末端,其特征在于:所述内侧板(3)顶端设置有铰接座(9),所述铰接座(9)上具有第一连接槽;
3.根据权利要求2所述的一种舞蹈机器人的动作执行末端,其特征在于:所述手指近节(5)的另一端上设置有第二连接部(16),所述第二连接部(16)上设置有第二弧形槽(17);
4.根据权利要求3所述的一种舞蹈机器人的动作执行末端,其特征在于:所述手指中节(6)的另一端设置有第三连接部(21),所述第三连接部(21)上设置有第三弧形槽(22);
5.根据权利要求4所述的一种舞蹈机器人的动作执行末端,其特征在于:所述手指近节(5)和手指中节(6)上均具有沿轴线延伸的安装槽(27),所述连杆(8)位于所述安装槽(27)内设置。
6.根据权利要求2所述的一种舞蹈机器人的动作执行末端,其特征在于:所述驱动组件包括驱动单元(28)和安装在所述驱动单元(28)上的传动件(29),所述驱动单元(28)固定安装在所述内侧板(3)内壁上,所述传动件(29)与所述连杆(8)通过第九销轴转动连接。
7.根据权利要求6所述的一种舞蹈机器人的动作执行末端,其特征在于:所述驱动单元(28)为伺服电机或伺服舵机。
8.根据权利要求6所述的一种舞蹈机器人的动作执行末端,其特征在于:所述内侧板(3)内壁上设置有固定柱(30),所述驱动单元(28)固定安装在所述固定柱(30)内。
技术总结
本技术公开了一种舞蹈机器人的动作执行末端,包括手掌机构和设置在所述手掌机构上的五个手指机构,所述手掌机构和五个所述手指机构构成仿真手模型结构;其中,所述手掌机构包括相对扣合设置的内侧板和外侧板,所述内侧板和外侧板之间间隔形成安装腔;所述手指机构包括三根依次铰接的手指近节、手指中节和手指末节以及用于驱动所述手指近节、手指中节和手指末节活动的驱动组件,所述手指近节铰接在所述内侧板上;所述驱动组件包括驱动模块和多根连杆,所述驱动组件设置在所述安装腔内,所述驱动组件与手指近节之间以及相邻两根指节之间均通过所述连杆传动连接。本动作执行末端丰富了舞蹈机器人的舞蹈动作,表演时更具有表现力和感染力。
技术研发人员:刘诣,张剑波,李兆庭,孙逸寒,邱成帅,施方舟,高洁
受保护的技术使用者:河北政法职业学院
技术研发日:20230322
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!