一种空间升降大行程轨道式巡检机器人的制作方法
本技术涉及一种空间升降大行程轨道式巡检机器人,属于智能巡检设备。
背景技术:
1、巡检机器人基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控,7*24小时不间断检查app交易、营销活动、账户安全等核心功能流程。
2、目前使用的轨道巡检机器人在使用时,由于巡检机器人在上下调节高度时使用的升降机构的行程有限,从而影响巡检机器人的检测效果,因此,需要进行优化和改善。
技术实现思路
1、本实用新型的目的在于提供一种空间升降大行程轨道式巡检机器人,通过设置电动伸缩杆一与电动伸缩杆二,电动伸缩杆一与电动伸缩杆二均可以带动摄像头向下移动调节高度,并且,电动伸缩杆一本体可以在驱动电机与传动齿轮的带动下从电动小车上向下移动调节位置,从而可以大大增加巡检机器人的升降行程,方便巡检机器人进行巡检监控,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
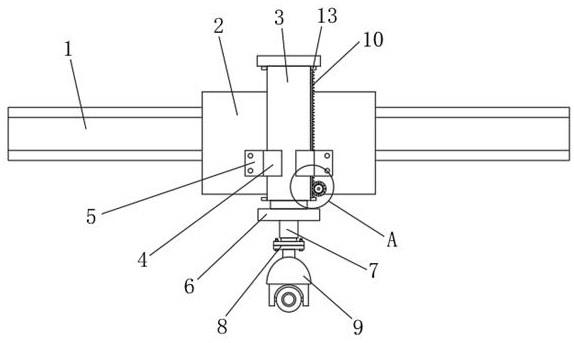
3、一种空间升降大行程轨道式巡检机器人,包括滑轨,所述滑轨外部连接有电动小车,所述电动小车外部一侧固定连接有电动伸缩杆一,所述电动伸缩杆一外部固定连接有卡箍,所述卡箍一端两侧设有安装板,所述电动伸缩杆一底部与升降板固定连接,所述升降板内部连接有电动伸缩杆二,所述电动伸缩杆二底部连接有连接板,所述连接板下方固定连接有摄像头。
4、进一步的,所述电动伸缩杆一一侧设有齿板,所述齿板下方一侧与传动齿轮啮合,所述传动齿轮中心与驱动电机输出端连接,所述驱动电机端部与所述电动小车连接。
5、进一步的,所述安装板通过紧固螺栓与所述电动小车连接,所述电动伸缩杆一在所述卡箍内部滑动连接,所述电动伸缩杆一上位于所述齿板两端设有限位块。
6、进一步的,所述升降板一端延伸至所述电动小车下方,所述电动伸缩杆二设于所述电动小车下方中心。
7、进一步的,所述电动伸缩杆二贯穿于所述升降板内部并与所述升降板固定连接,所述电动小车下方开设有容纳所述电动伸缩杆二的凹槽。
8、进一步的,所述连接板数量为两个并分别与所述电动伸缩杆二底部、所述摄像头顶部连接,两个所述连接板通过紧固螺栓相互连接。
9、本实用新型的有益效果是:
10、通过设置电动伸缩杆一与电动伸缩杆二,电动伸缩杆一可以带动电动升降板向下移动,从而可以带动电动伸缩杆一与摄像头向下移动调节位置,同时,电动伸缩杆二在运行时可以带动摄像头继续向下移动,并且,电动伸缩杆一本体可以在驱动电机与传动齿轮的带动下从电动小车上向下移动调节位置,从而可以再次增加巡检机器人的升降行程,进而增加摄像头在使用时的高度调节范围,方便巡检机器人进行巡检监控。
技术特征:
1.一种空间升降大行程轨道式巡检机器人,包括滑轨(1),其特征在于:所述滑轨(1)外部连接有电动小车(2),所述电动小车(2)外部一侧固定连接有电动伸缩杆一(3),所述电动伸缩杆一(3)外部固定连接有卡箍(4),所述卡箍(4)一端两侧设有安装板(5),所述电动伸缩杆一(3)底部与升降板(6)固定连接,所述升降板(6)内部连接有电动伸缩杆二(7),所述电动伸缩杆二(7)底部连接有连接板(8),所述连接板(8)下方固定连接有摄像头(9)。
2.根据权利要求1所述的一种空间升降大行程轨道式巡检机器人,其特征在于:所述电动伸缩杆一(3)一侧设有齿板(10),所述齿板(10)下方一侧与传动齿轮(11)啮合,所述传动齿轮(11)中心与驱动电机(12)输出端连接,所述驱动电机(12)端部与所述电动小车(2)连接。
3.根据权利要求2所述的一种空间升降大行程轨道式巡检机器人,其特征在于:所述安装板(5)通过紧固螺栓与所述电动小车(2)连接,所述电动伸缩杆一(3)在所述卡箍(4)内部滑动连接,所述电动伸缩杆一(3)上位于所述齿板(10)两端设有限位块(13)。
4.根据权利要求1所述的一种空间升降大行程轨道式巡检机器人,其特征在于:所述升降板(6)一端延伸至所述电动小车(2)下方,所述电动伸缩杆二(7)设于所述电动小车(2)下方中心。
5.根据权利要求1所述的一种空间升降大行程轨道式巡检机器人,其特征在于:所述电动伸缩杆二(7)贯穿于所述升降板(6)内部并与所述升降板(6)固定连接,所述电动小车(2)下方开设有容纳所述电动伸缩杆二(7)的凹槽。
6.根据权利要求1所述的一种空间升降大行程轨道式巡检机器人,其特征在于:所述连接板(8)数量为两个并分别与所述电动伸缩杆二(7)底部、所述摄像头(9)顶部连接,两个所述连接板(8)通过紧固螺栓相互连接。
技术总结
本技术涉及一种空间升降大行程轨道式巡检机器人,包括滑轨,所述滑轨外部连接有电动小车,所述电动小车外部一侧固定连接有电动伸缩杆一,所述电动伸缩杆一外部固定连接有卡箍,所述卡箍一端两侧设有安装板,所述电动伸缩杆一底部与升降板固定连接,所述升降板内部连接有电动伸缩杆二,所述电动伸缩杆二底部连接有连接板,所述连接板下方固定连接有摄像头。本技术通过设置电动伸缩杆一与电动伸缩杆二,电动伸缩杆一与电动伸缩杆二均可以带动摄像头向下移动调节高度,并且,电动伸缩杆一本体可以在驱动电机与传动齿轮的带动下从电动小车上向下移动调节位置,从而可以大大增加巡检机器人的升降行程,方便巡检机器人进行巡检监控。
技术研发人员:时国柱,徐晨鑫,雷凌,张志坚
受保护的技术使用者:南京北新智能科技有限公司
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!