一种机器人行进防撞倒的稳定装置的制作方法
本技术涉及机器人设备,尤其涉及一种机器人行进防撞倒的稳定装置。
背景技术:
1、机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
2、目前,公告号为cn214110470u的中国专利公告的一种巡检机器人防倾倒装置,包括在机器人向前倾倒时能够支撑所述机器人的摆动支架及固定支架;所述摆动支架包括摆座、摆杆及配重块;所述摆座设于所述机器人的外壳的侧面,所述摆杆的一端与所述摆座以可转动的方式连接,所述摆杆的另一端与所述配重块连接;所述固定支架的一端设置于所述机器人的外壳的前端面;在所述机器人因碰撞急停而向前倾斜的状态下,所述固定支架的另一端与地面抵接,且所述配重块由于惯性向前摆动至与地面抵接。本实用新型缓解了现有技术中巡检机器人在实际工作过程中,需要不停的移动,如果突遇障碍物或发生碰撞,巡检机器人会急速停止移动,这种急停可能会导致巡检机器人向前倾倒,从而造成一定程度的损坏的技术问题。
3、上述方案采用,在实际生产中发现现有防撞倒稳定装置只能固定在一个机器人上,不能根据不同尺寸大小机器人进行使用,同时不能进行拆卸,存在实用性单一且不便于拆卸维护的问题,因此我们提出了一种机器人行进防撞倒的稳定装置用于解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在现有防撞倒稳定装置只能固定在一个机器人上,不能根据不同尺寸大小机器人进行使用,同时不能进行拆卸,存在实用性单一且不便于拆卸维护的缺点,而提出的一种机器人行进防撞倒的稳定装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
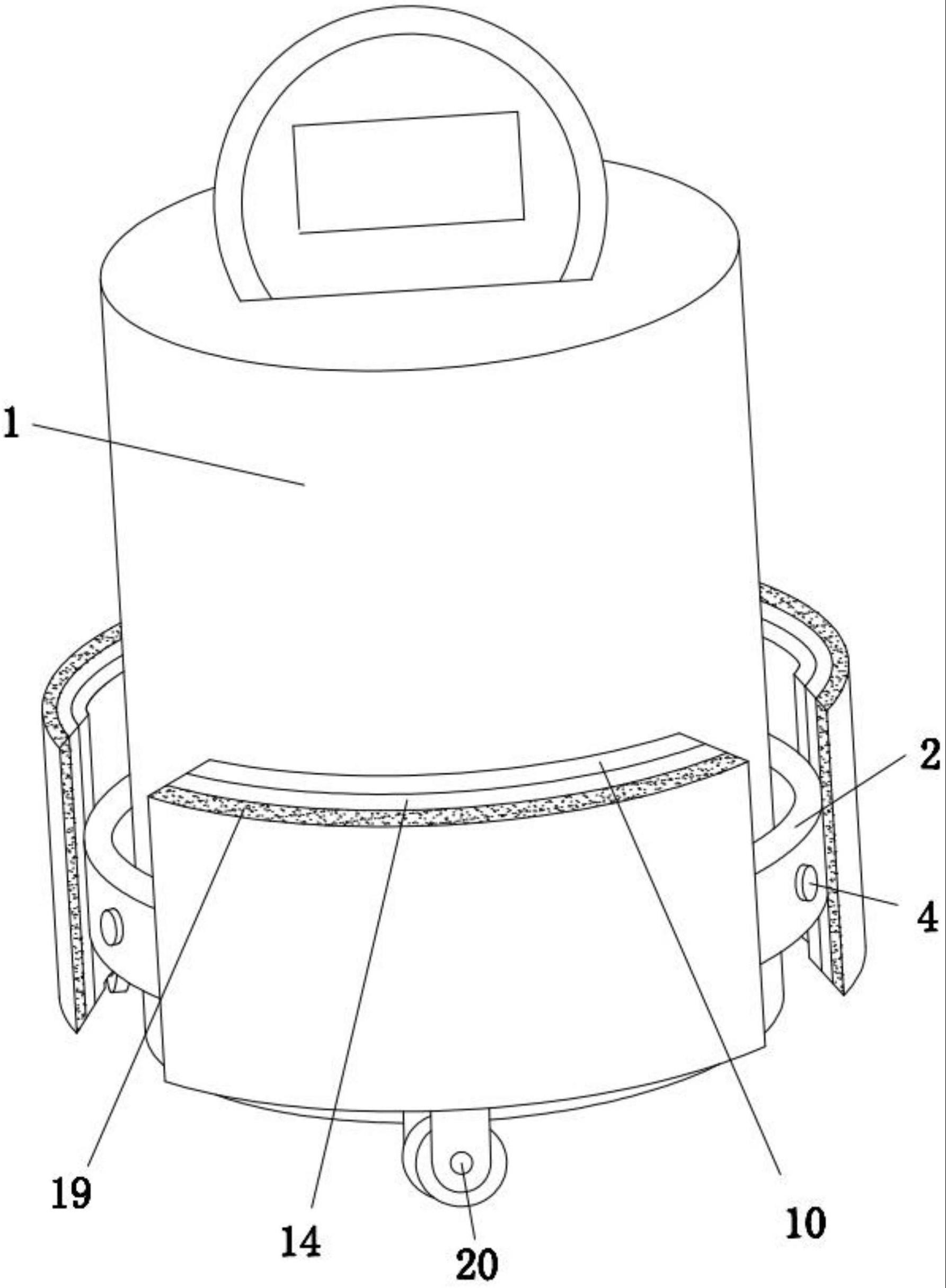
3、一种机器人行进防撞倒的稳定装置,包括机器人,所述机器人外侧设置有固定环,所述固定环上设置有挤压机构,固定环与机器人之间设置有复位机构;固定环外侧设置有缓冲块,缓冲块与固定环之间设置有缓冲机构,缓冲块外侧固定安装有重力感应器,重力感应器与机器人之间设置有传感机构。
4、优选的,所述挤压机构包括螺纹杆、旋钮和摩擦垫,所述螺纹杆螺纹安装在固定环上,旋钮固定安装在螺纹杆一端,螺纹杆另一端固定安装有摩擦垫。
5、优选的,所述复位机构包括滑筒、滑杆和复位弹簧,所述滑筒固定安装在固定环靠近机器人的一侧上,滑杆滑动安装在滑筒内,复位弹簧滑动套设在滑筒和滑杆上。
6、优选的,所述滑杆靠近机器人一端固定安装有夹块,所述摩擦垫与夹块相适配。
7、优选的,所述夹块靠近机器人一侧设置有橡胶垫,所述橡胶垫与机器人相适配,复位弹簧两端与固定环靠近机器人的一侧和夹块外侧固定连接。
8、优选的,所述缓冲机构包括缓冲杆、缓冲槽和减震弹簧,所述缓冲杆一端与缓冲块固定连接,固定环外侧开设有缓冲槽,缓冲杆另一端与缓冲槽滑动连接,减震弹簧滑动套设在缓冲杆上,减震弹簧两端分别与固定环外侧和缓冲块靠近机器人的一侧固定连接。
9、优选的,所述传感机构包括传感线、传感器、转接线和转接头,所述传感线与重力感应器电性连接,传感器固定安装在固定环顶部上,传感线与传感器电性连接,转接线一端与传感器电性连接,转接线另一端固定安装有转接头,转接头与机器人电性连接。
10、优选的,所述缓冲块底部设置有辅助轮,所述重力感应器外侧设置有减震垫。
11、本实用新型的有益效果:
12、1、通过固定环、旋钮、螺纹杆、摩擦垫的配合,通过滑筒、滑杆、复位弹簧、夹块和橡胶垫的配合,能够实现对不同大小尺寸的机器人进行夹持固定,能够实现适用于多种机器人的目的;
13、2、通过固定环、缓冲杆、缓冲槽、减震弹簧和缓冲块的配合,能够实现在减震垫受到外力撞击时对固定环进行缓冲减震,能够实现对机器人进行缓冲减震的目的,通过重力感应器、传感器、传感线、转接线和转接头的配合,能够实现减震垫在受到外力撞击时撞击信息能够被机器人接收到,能够实现机器人做出向顺从撞击方向的位置进行移动的目的,能够实现防止机器人侧翻的目的。
技术特征:
1.一种机器人行进防撞倒的稳定装置,其特征在于,包括机器人(1),所述机器人(1)外侧设置有固定环(2),所述固定环(2)上设置有挤压机构,所述固定环(2)与机器人(1)之间设置有复位机构;
2.根据权利要求1所述的一种机器人行进防撞倒的稳定装置,其特征在于,所述缓冲机构包括缓冲杆(11)、缓冲槽(12)和减震弹簧(13),所述缓冲杆(11)一端与缓冲块(10)固定连接,所述固定环(2)外侧开设有缓冲槽(12),所述缓冲杆(11)另一端与缓冲槽(12)滑动连接,所述减震弹簧(13)滑动套设在缓冲杆(11)上,所述减震弹簧(13)两端分别与固定环(2)外侧和缓冲块(10)靠近机器人(1)的一侧固定连接。
3.根据权利要求1所述的一种机器人行进防撞倒的稳定装置,其特征在于,所述传感机构包括传感线(16)、传感器(15)、转接线(17)和转接头(18),所述传感线(16)与重力感应器(14)电性连接,所述传感器(15)固定安装在固定环(2)顶部上,所述传感线(16)与传感器(15)电性连接,所述转接线(17)一端与传感器(15)电性连接,所述转接线(17)另一端固定安装有转接头(18),所述转接头(18)与机器人(1)电性连接。
4.根据权利要求1所述的一种机器人行进防撞倒的稳定装置,其特征在于,所述缓冲块(10)底部设置有辅助轮(20),所述重力感应器(14)外侧设置有减震垫(19)。
技术总结
本技术属于机器人设备技术领域,尤其是一种机器人行进防撞倒的稳定装置,包括机器人,所述机器人外侧设置有固定环,所述固定环上设置有挤压机构,所述固定环与机器人之间设置有复位机构;所述固定环外侧设置有缓冲块,所述缓冲块与固定环之间设置有缓冲机构,缓冲块外侧固定安装有重力感应器,重力感应器与机器人之间设置有传感机构。本技术设计合理,通过设置挤压机构,能够实现稳定装置进行固定到机器人上的目的,通过设置缓冲机构,能够实现对机器人进行缓冲减震的目的,通过设置传感机构,能够实现机器人做出向顺从撞击方向的位置进行移动,能够实现防止机器人侧翻的目的。
技术研发人员:王艳丽
受保护的技术使用者:青岛淘科鸿软件技术有限公司
技术研发日:20230328
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!