一种工业机器人用分拣夹具的制作方法
本技术涉及机器人夹具连接结构,尤其涉及一种工业机器人用分拣夹具。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机器人对产品进行抓取分拣时,需要用到分拣夹具,现有的分拣夹具一般直接对货物进行夹取,中间没有设置缓冲物,此外,现有的分拣夹具拆卸及安装不够方便,在分拣夹具出现问题需要维修时,对于分拣夹具的拆卸需要占用工作人员较长的时间。
2、公开号为cn 214352529 u的专利公开了一种工业机器人用分拣夹具,包括主体、夹持装置、连接装置以及固定装置,所述主体的左右两个侧壁开设有槽口,所述夹持装置活动连接于主体,且夹持装置的一端设于主体外表面,所述连接装置设于主体的上方,且连接装置底部固定连接于主体的顶部,所述固定装置活动连接于连接装置靠近顶部的内腔侧壁,该实用新型,通过弹簧以及接触板的相互配合,使得分拣夹具在对物品进行夹持时,弹簧起到了一定的缓冲作用,更好的保护了被夹持的物品,此外,通过夹持装置以及连接装置的相互配合,使得整个分拣夹具的高度可调节,且当分拣夹具出现故障时,工作人员可以方便的将分拣夹具拆卸下来,节约了工作人员的时间。
3、但该专利中的连接装置在对夹具进行拆装时,需要对两个固定螺栓进行拧动,并且在安装过程中需要将上壳与固定环上的螺纹孔进行对齐才能通过固定螺栓进行固定,拆装效率一般。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人用分拣夹具,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人用分拣夹具,包括夹持机构主体和第二连接杆,所述夹持机构主体上安装有固定夹块,夹持机构主体上开设有移动槽,移动槽内布置有电动推杆,电动推杆的动作输出端上安装有活动夹块,所述活动夹块与固定夹块上均通过缓冲弹簧连接有橡胶垫,所述夹持机构主体上安装有第一连接杆,第一连接杆插接在第二连接杆上,第一连接杆的底部布置有对接插块,第二连接杆的顶部开设有与对接插块相适配的对接插孔,所述对接插块内开设有空腔,空腔内转动安装有转动盘,转动盘上沿圆周方向均匀开设有两个弧形滑槽,弧形滑槽内滑动安装有两个转动轴,转动轴上安装有连接件,连接件上安装有锁紧插块,所述对接插孔内开设有两个与锁紧插块相适配的锁紧插槽,所述转动盘上安装有连接轴,连接轴上安装有连接块,连接块上安装有调节块。
3、优选的,所述空腔的内壁上开设有两个可供锁紧插块通过的通孔。
4、优选的,所述第一连接杆上开设有扇形槽,连接块滑动安装在扇形槽内。
5、优选的,所述调节块上安装有限位插块,第一连接杆上开设有与限位插块相适配的限位插孔。
6、优选的,所述转动盘上安装有限位转轴,空腔内开设有与限位转轴相适配的转动孔,限位转轴转动安装在转动孔内。
7、优选的,所述移动槽内开设有两个相互对称的水平限位槽,水平限位槽内滑动安装有水平限位块,水平限位块安装在活动夹块上。
8、优选的,所述橡胶垫上沿轴向均匀开设有若干防滑槽。
9、本实用新型的有益效果是:
10、本实用新型中,通过布置有的对接插块、对接插槽、转动盘和锁紧插块等结构的相互配合,从而可在需要对夹具进行安装时,通过将第一连接杆上的对接插块插入至第二连接杆上的对接插孔内,并且由于对接插块与对接插孔的横截面均为圆形两侧布置有矩形凸起,因此不会造成插入时无法对齐的问题,当对接插块完全插入至对接插孔内后,通过拨动调节块带动转动盘转动,从而可通过弧形滑槽使得两个锁紧插块相互远离,并插入至对接插孔内的锁紧插槽中,从而完成第一连接杆与第二连接杆的锁紧固定;
11、本实用新型中,在对夹具进行拆卸时,通过反向拨动调节块带动转动盘反向转动,进而可带动两个锁紧插块相互远离,从而使得锁紧插块退出锁紧插槽,进而解除第一连接杆与第二连接杆之间的锁紧固定,进而可完成对夹持机构主体的拆卸工作。
技术特征:
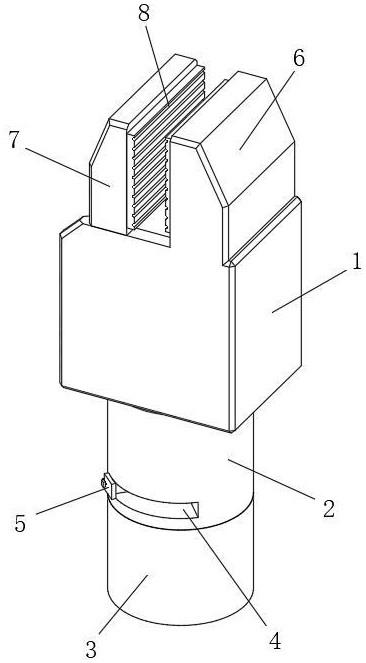
1.一种工业机器人用分拣夹具,包括夹持机构主体(1)和第二连接杆(3),其特征在于:所述夹持机构主体(1)上安装有固定夹块(6),夹持机构主体(1)上开设有移动槽(20),移动槽(20)内布置有电动推杆(23),电动推杆(23)的动作输出端上安装有活动夹块(7),所述活动夹块(7)与固定夹块(6)上均通过缓冲弹簧(24)连接有橡胶垫(8),所述夹持机构主体(1)上安装有第一连接杆(2),第一连接杆(2)插接在第二连接杆(3)上,第一连接杆(2)的底部布置有对接插块(18),第二连接杆(3)的顶部开设有与对接插块(18)相适配的对接插孔(17),所述对接插块(18)内开设有空腔(12),空腔(12)内转动安装有转动盘(13),转动盘(13)上沿圆周方向均匀开设有两个弧形滑槽(14),弧形滑槽(14)内滑动安装有两个转动轴(25),转动轴(25)上安装有连接件(19),连接件(19)上安装有锁紧插块(27),所述对接插孔(17)内开设有两个与锁紧插块(27)相适配的锁紧插槽(28),所述转动盘(13)上安装有连接轴(10),连接轴(10)上安装有连接块(9),连接块(9)上安装有调节块(5)。
2.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述空腔(12)的内壁上开设有两个可供锁紧插块(27)通过的通孔。
3.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述第一连接杆(2)上开设有扇形槽,连接块(9)滑动安装在扇形槽内。
4.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述调节块(5)上安装有限位插块(11),第一连接杆(2)上开设有与限位插块(11)相适配的限位插孔(26)。
5.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述转动盘(13)上安装有限位转轴(15),空腔(12)内开设有与限位转轴(15)相适配的转动孔(16),限位转轴(15)转动安装在转动孔(16)内。
6.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述移动槽(20)内开设有两个相互对称的水平限位槽(21),水平限位槽(21)内滑动安装有水平限位块(22),水平限位块(22)安装在活动夹块(7)上。
7.根据权利要求1所述的一种工业机器人用分拣夹具,其特征在于:所述橡胶垫(8)上沿轴向均匀开设有若干防滑槽。
技术总结
本技术公开了一种工业机器人用分拣夹具,包括夹持机构主体和第二连接杆,所述夹持机构主体上安装有固定夹块,夹持机构主体上开设有移动槽,移动槽内布置有电动推杆,在需要对夹具进行安装时,通过将第一连接杆上的对接插块插入至第二连接杆上的对接插孔内,并且由于对接插块与对接插孔的横截面均为圆形两侧布置有矩形凸起,因此不会造成插入时无法对齐的问题,当对接插块完全插入至对接插孔内后,通过拨动调节块带动转动盘转动,从而可通过弧形滑槽使得两个锁紧插块相互远离,并插入至对接插孔内的锁紧插槽中,从而完成第一连接杆与第二连接杆的锁紧固定。
技术研发人员:张超,魏鹏鹏
受保护的技术使用者:昆山恒智信科电子设备有限公司
技术研发日:20230714
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!