一种机器人末端三轴及机器人的制作方法
本技术属于机器人领域,具体涉及一种机器人末端三轴及机器人。
背景技术:
1、现有技术中,工业机器人应用于喷涂这一场景时,因负载的阈值比较广,但大负载能力对喷涂应用来讲是负担,并且存在奇异点,不够灵活,奇异点的存在可能造成喷涂轨迹在某些位置断续,影响喷涂品质,市场上也有用中空手腕结构的喷涂机器人本体,结构紧凑,不存在奇异点,相对灵活得多,但中空手腕结构往往比较复杂,需要的零部件数量多且精度要求高,加工难度大成本高,不利于推广。
2、因此,针对这一现状,迫切需要开发一种能低成本使用、不存在奇异点、灵活的机器人末端三轴及机器人,以克服当前实际应用中的不足。
技术实现思路
1、因此,本实用新型的目的在于克服现有技术存在的不足,而提供一种简单、制造成本低、不存在奇异点、灵活,能提高工作质量的机器人末端三轴及机器人。
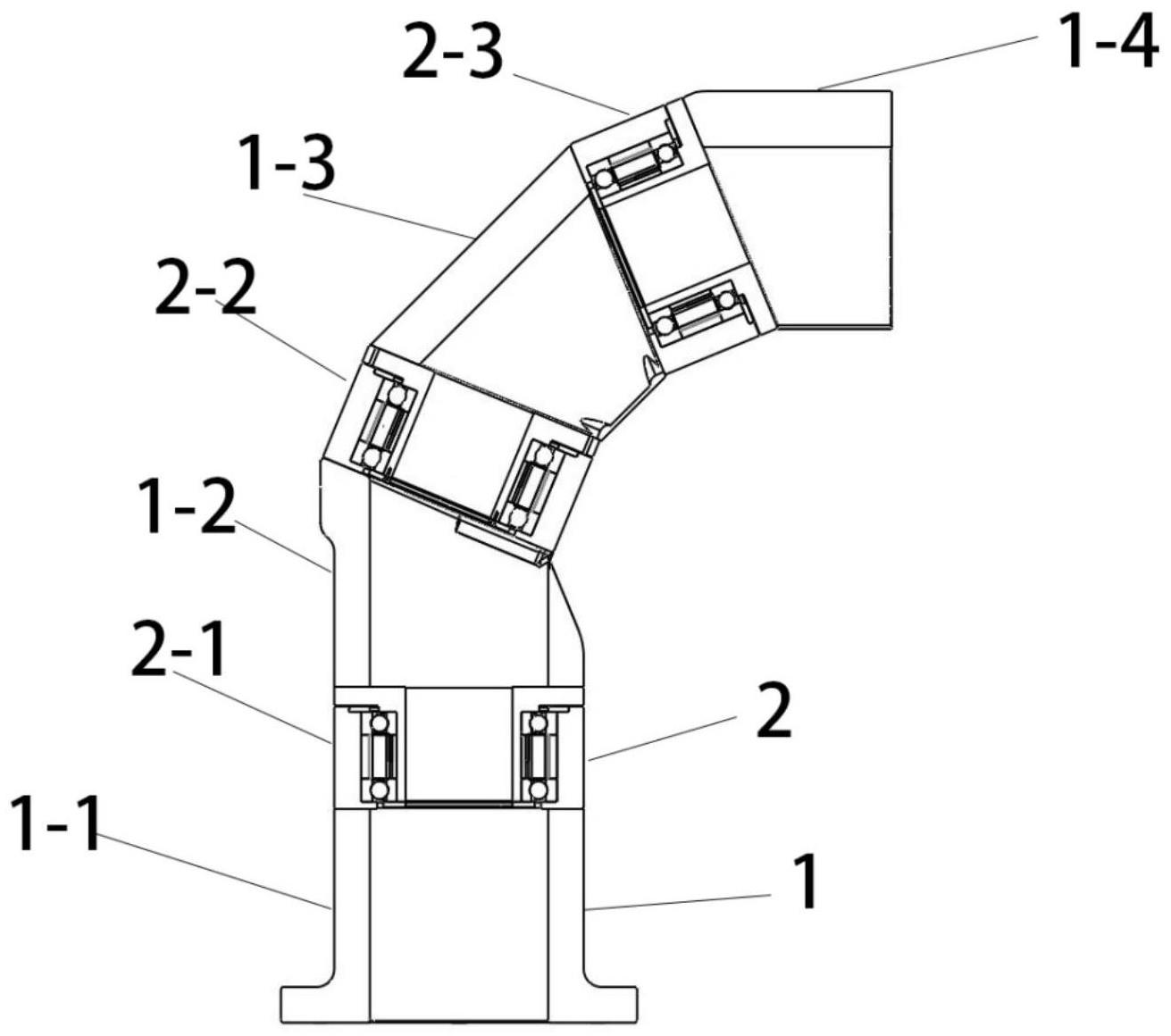
2、本实用新型的目的是通过如下技术方案来完成的,一种机器人末端三轴,包括壳体1和电机2,所述壳体1为三轴承矢量喷管结构,所述壳体1包括第一段壳体1-1、第二段壳体1-2、第三段壳体1-3和第四段壳体1-4,所述电机2包括第一电机2-1、第二电机2-2和第三电机2-3;所述第一段壳体1-1的第二端面与第一电机2-1的定子连接,第一电机2-1的转子与第二段壳体1-2第一端面连接,第二段壳体1-2第二端面与第二电机2-2定子连接,第二电机2-2的转子与第三段壳体1-3第一端面连接,第三段壳体1-3第二端面与第三电机2-3的定子连接,所述第三电机2-3的转子与所述第四段壳体1-4的第一端面连接。
3、优选地,所述电机2为环状的中空力矩电机,所述中空力矩电机的中部具有中空腔,两端具有通孔。
4、优选地,所述第二段壳体1-2与所述第三段壳体1-3的轴线相交处为所述第二电机2-2的几何中心。
5、优选地,所述第三段壳体1-3与所述第四段壳体1-4的轴线相交处为所述第三电机2-3的几何中心。
6、优选地,所述第一段壳体1-1与第二段壳体1-2的轴线重合。
7、优选地,所述第二段壳体1-2、第三段壳体1-3和第四段壳体1-4的轴线共面。
8、优选地,所述第三段壳体1-3设置有轴向弯部1-3-1。
9、优选地,所述第一段壳体1-1的第一端面与机器人本体连接处相适配。
10、优选地,所述第一段壳体1-1、第二段壳体1-2、第三段壳体1-3和第四段壳体1-4的内径截面相同。
11、优选地,一种机器人,包括本体和机器人末端三轴,所述机器人末端三轴为如上任一项所述的机器人末端三轴,所述本体与所述机器人末端三轴的连接处与所述末端三轴的第一段壳体1-1的第一端面连接。
12、本实用新型通过上述技术方案,可以实现如下效果:
13、本实用新型通过将机器人的末端三轴设置为三轴承矢量喷管结构,使用多个电机对三轴承矢量喷管结构的各个分段连接、旋转控制,利用电机的动子和转子连接各个分段,不需要精密的连接结构,结构简单,制作成本降低,利用电机让三轴承矢量喷管结构的各个分段有一定的偏转角后,使三轴承矢量喷管也就是机器人的末端三轴整体绕第一段壳体的轴线旋转一定角度,没有奇异点,角度变换灵活,避免工作过程中的卡顿、轨迹的断裂,结构简化,制作成本低,利于推广。
技术特征:
1.一种机器人末端三轴,其特征在于:包括壳体(1)和电机(2),所述壳体(1)为三轴承矢量喷管结构,所述壳体(1)包括第一段壳体(1-1)、第二段壳体(1-2)、第三段壳体(1-3)和第四段壳体(1-4),所述电机(2)包括第一电机(2-1)、第二电机(2-2)和第三电机(2-3);所述第一段壳体(1-1)的第二端面与第一电机(2-1)的定子连接,第一电机(2-1)的转子与第二段壳体(1-2)第一端面连接,第二段壳体(1-2)第二端面与第二电机(2-2)定子连接,第二电机(2-2)的转子与第三段壳体(1-3)第一端面连接,第三段壳体(1-3)第二端面与第三电机(2-3)的定子连接,所述第三电机(2-3)的转子与所述第四段壳体(1-4)的第一端面连接。
2.根据权利要求1所述的机器人末端三轴,其特征在于:所述电机(2)为环状的中空力矩电机,所述中空力矩电机的中部具有中空腔,两端具有通孔。
3.根据权利要求1所述的机器人末端三轴,其特征在于:所述第二段壳体(1-2)与所述第三段壳体(1-3)的轴线相交处为所述第二电机(2-2)的几何中心。
4.根据权利要求1所述的机器人末端三轴,其特征在于:所述第三段壳体(1-3)与所述第四段壳体(1-4)的轴线相交处为所述第三电机(2-3)的几何中心。
5.根据权利要求1所述的机器人末端三轴,其特征在于:所述第一段壳体(1-1)与第二段壳体(1-2)的轴线重合。
6.根据权利要求1所述的机器人末端三轴,其特征在于:所述第二段壳体(1-2)、第三段壳体(1-3)和第四段壳体(1-4)的轴线共面。
7.根据权利要求1所述的机器人末端三轴,其特征在于:所述第三段壳体(1-3)设置有轴向弯部(1-3-1)。
8.根据权利要求1所述的机器人末端三轴,其特征在于:所述第一段壳体(1-1)的第一端面与机器人本体连接处相适配。
9.根据权利要求1所述的机器人末端三轴,其特征在于:所述第一段壳体(1-1)、第二段壳体(1-2)、第三段壳体(1-3)和第四段壳体(1-4)的内径截面相同。
10.一种机器人,其特征在于:包括本体和机器人末端三轴,所述机器人末端三轴为如权利要求1-9任一项所述的机器人末端三轴,所述本体与所述机器人末端三轴的连接处与所述末端三轴的第一段壳体(1-1)的第一端面连接。
技术总结
本技术提供一种机器人末端三轴及机器人,包括壳体和电机,所述壳体为三轴承矢量喷管结构,第一段壳体的第二端面与第一电机的定子连接,第一电机的转子与第二段壳体第一端面连接,第二段壳体第二端面与第二电机定子连接,第二电机的转子与第三段壳体第一端面连接,第三段壳体第二端面与第三电机的定子连接,第三电机的转子与第四段壳体的第一端面连接。本技术通过使用多个电机对三轴承矢量喷管结构的各个分段连接、旋转控制,利用电机的动子和转子连接各个分段,不需要精密的连接结构,结构简单,制作成本降低,没有奇异点,角度变换灵活,避免工作过程中的卡顿,轨迹的断裂,利于推广。
技术研发人员:王伟华
受保护的技术使用者:清能精控机器人技术(佛山)有限公司
技术研发日:20230328
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!