防撞击分拣机器人吸取装置的制作方法
本技术属于分拣夹头,尤其涉及一种防撞击分拣机器人吸取装置。
背景技术:
1、分拣是将物品按品种、出入库先后顺序进行分门别类地堆放的作业。分拣是完善送货、支持送货的准备性工作,是不同配送企业在送货时竞争和提高自身经济效益的必然延伸。分拣作业时,分拣设备通常使用分拣夹爪对货物进行分拣。
2、例如,申请号为“cn202122302981.3”,主题名称为一种分体式通用型吸盘缓冲杆的实用新型专利提及“中空的吸盘夹具固定螺丝、缓冲杆和吸盘装换头,吸盘夹具固定螺丝的内部设有内六角腔体,吸盘夹具固定螺丝的外部螺纹连接有用于固定吸盘夹具的吸盘夹具安装螺帽,缓冲杆套设于吸盘夹具固定螺丝的内部,缓冲杆底部设有内六角限位部,内六角限位部滑动套接于内六角腔体的内部,吸盘装换头的底部设有第三螺纹口,第三螺纹口的外部螺纹连接有吸盘”,该结构实现吸盘的便捷拆装、拆装吸盘时防止缓冲杆跟随转动。
3、然而,从该专利中可得,现有的吸取装置通常由缓冲部分和吸盘部分,其中缓冲部分通常使用弹性件来实现缓冲,但是,现有的吸取装置中不具有行程限位的机构,在超负荷缓冲时,容易导致缓冲部分的零部件损坏,降低吸取装置的使用寿命,增加成本支出,不利于生产。
技术实现思路
1、本实用新型的目的在于提供一种防撞击分拣机器人吸取装置,旨在解决现有技术中的现有的吸取装置中不具有行程限位的机构,在超负荷缓冲时,容易导致缓冲部分的零部件损坏,降低吸取装置的使用寿命,增加成本支出,不利于生产的技术问题。
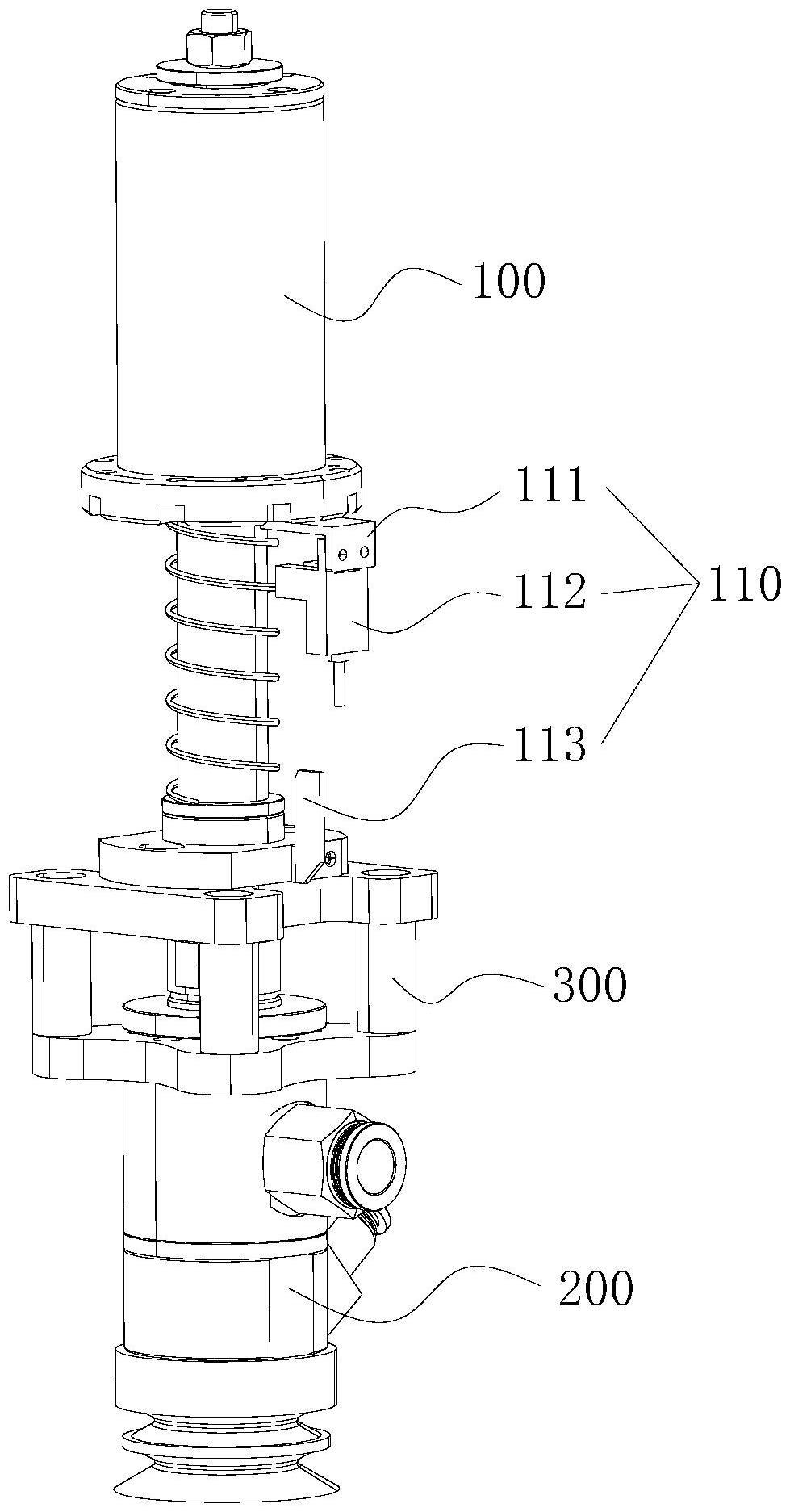
2、为实现上述目的,本实用新型实施例提供的一种防撞击分拣机器人吸取装置,包括缓冲机构及吸盘机构,所述缓冲机构用于缓冲吸取装置受到的冲击力,所述吸盘机构设置在所述缓冲机构上且用于吸附货物,所述缓冲机构上设置有限位部件,所述限位部件用于防止吸取装置超出移动行程。
3、优选地,所述限位部件包括安装板、光栅传感器及遮挡板,所述安装板设置在所述缓冲机构上,所述光栅传感器设置在所述安装板上且用于控制吸取装置的运作,所述遮挡板设置在所述缓冲机构靠近所述吸盘机构一端。
4、优选地,所述光栅传感器一侧设置有与所述遮挡板对应的开槽,所述遮挡板可进入或者脱离所述光栅传感器。
5、优选地,所述缓冲机构与所述吸盘机构之间设置有固定架,所述固定架与所述缓冲机构、吸盘机构通过螺栓连接。
6、优选地,所述缓冲机构包括传动轴、弹性件、轴承套及固定件,所述轴承套、固定件设置在所述传动轴远离所述吸盘机构一端,所述轴承套的顶部与所述固定件底部相抵触,所述弹性件设置在所述轴承套与所述传动轴之间。
7、优选地,所述传动轴与所述轴承套之间设置有导向套,所述导向套用于所述传动轴的导向。
8、优选地,所述传动轴靠近所述固定件一端设置有多组限位槽,所述固定件底部成型有与所述限位槽对应的限位部。
9、优选地,所述吸盘机构包括第一连接部、第二连接部及吸盘部,所述所述第一连接部设置在所述第二连接部一端,所述吸盘部设置在所述第二连接部另一端。
10、优选地,所述第一连接部内设置有引导套,所述引导套为上窄下宽结构,所述引导套用于提高吸盘机构的负载大小。
11、优选地,所述第二连接部与所述吸盘部之间设置有过滤板,所述过滤板上成型有多组通孔,所述过滤板用于防止吸盘机构堵塞。
12、本实用新型实施例提供的防撞击分拣机器人吸取装置中的上述一个或多个技术方案至少具有如下技术效果之一:
13、通过设置限位部件,夹取货物时,通过吸盘机构将货物进行吸取,若吸盘机构受到外界冲击,通过缓冲机构进行缓冲,降低冲击力对吸取装置的伤害,同时,在缓冲过程中通过限位部件对缓冲机构的移动行程进行限位,防止缓冲机构超程导致吸取装置损坏,提高自身的使用寿命,减少成本支出。
技术特征:
1.一种防撞击分拣机器人吸取装置,其特征在于,包括:
2.根据权利要求1所述的防撞击分拣机器人吸取装置,其特征在于:所述限位部件包括:
3.根据权利要求2所述的防撞击分拣机器人吸取装置,其特征在于:所述光栅传感器一侧设置有与所述遮挡板对应的开槽,所述遮挡板可进入或者脱离所述光栅传感器。
4.根据权利要求1~3任意一项所述的防撞击分拣机器人吸取装置,其特征在于:所述缓冲机构与所述吸盘机构之间设置有固定架,所述固定架与所述缓冲机构、吸盘机构通过螺栓连接。
5.根据权利要求1~3任意一项所述的防撞击分拣机器人吸取装置,其特征在于:所述缓冲机构包括传动轴、弹性件、轴承套及固定件,所述轴承套、固定件设置在所述传动轴远离所述吸盘机构一端,所述轴承套的顶部与所述固定件底部相抵触,所述弹性件设置在所述轴承套与所述传动轴之间。
6.根据权利要求5所述的防撞击分拣机器人吸取装置,其特征在于:所述传动轴与所述轴承套之间设置有导向套,所述导向套用于所述传动轴的导向。
7.根据权利要求6所述的防撞击分拣机器人吸取装置,其特征在于:所述传动轴靠近所述固定件一端设置有多组限位槽,所述固定件底部成型有与所述限位槽对应的限位部。
8.根据权利要求1~3任意一项所述的防撞击分拣机器人吸取装置,其特征在于:所述吸盘机构包括第一连接部、第二连接部及吸盘部,所述所述第一连接部设置在所述第二连接部一端,所述吸盘部设置在所述第二连接部另一端。
9.根据权利要求8所述的防撞击分拣机器人吸取装置,其特征在于:所述第一连接部内设置有引导套,所述引导套为上窄下宽结构,所述引导套用于提高吸盘机构的负载大小。
10.根据权利要求9所述的防撞击分拣机器人吸取装置,其特征在于:所述第二连接部与所述吸盘部之间设置有过滤板,所述过滤板上成型有多组通孔,所述过滤板用于防止吸盘机构堵塞。
技术总结
本技术属于分拣夹头技术领域,尤其涉及一种防撞击分拣机器人吸取装置,包括缓冲机构及吸盘机构,所述缓冲机构用于缓冲吸取装置受到的冲击力,所述吸盘机构设置在所述缓冲机构上且用于吸附货物,所述缓冲机构上设置有限位部件,所述限位部件用于防止吸取装置超出移动行程。通过设置限位部件,夹取货物时,通过吸盘机构将货物进行吸取,若吸盘机构受到外界冲击,通过缓冲机构进行缓冲,降低冲击力对吸取装置的伤害,同时,在缓冲过程中通过限位部件对缓冲机构的移动行程进行限位,防止缓冲机构超程导致吸取装置损坏,提高自身的使用寿命,减少成本支出。
技术研发人员:许家誉,杨日伦,陈文辉
受保护的技术使用者:广东弓叶科技有限公司
技术研发日:20230327
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!