一种适用于长轴工件的抓手的制作方法
本技术属于抓料设备,具体涉及一种适用于长轴工件的抓手。
背景技术:
1、随着机器人技术的飞速发展,工业机器人已广泛应用于各个领域,在物流码垛、设备生产作业中,采用机器人抓取工件自动码垛和上下料;
2、目前上下料抓手通常为对较小的物料进行夹持,在对长轴的物料进行夹持时会出现长度不够的现象,需要多个抓手抓住物料两端进行上料,在进行抓取时会出现抓取不稳的问题,因此需要设计一种适用于长轴工件的抓手解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种适用于长轴工件的抓手,以解决上述背景技术中提出的问题。
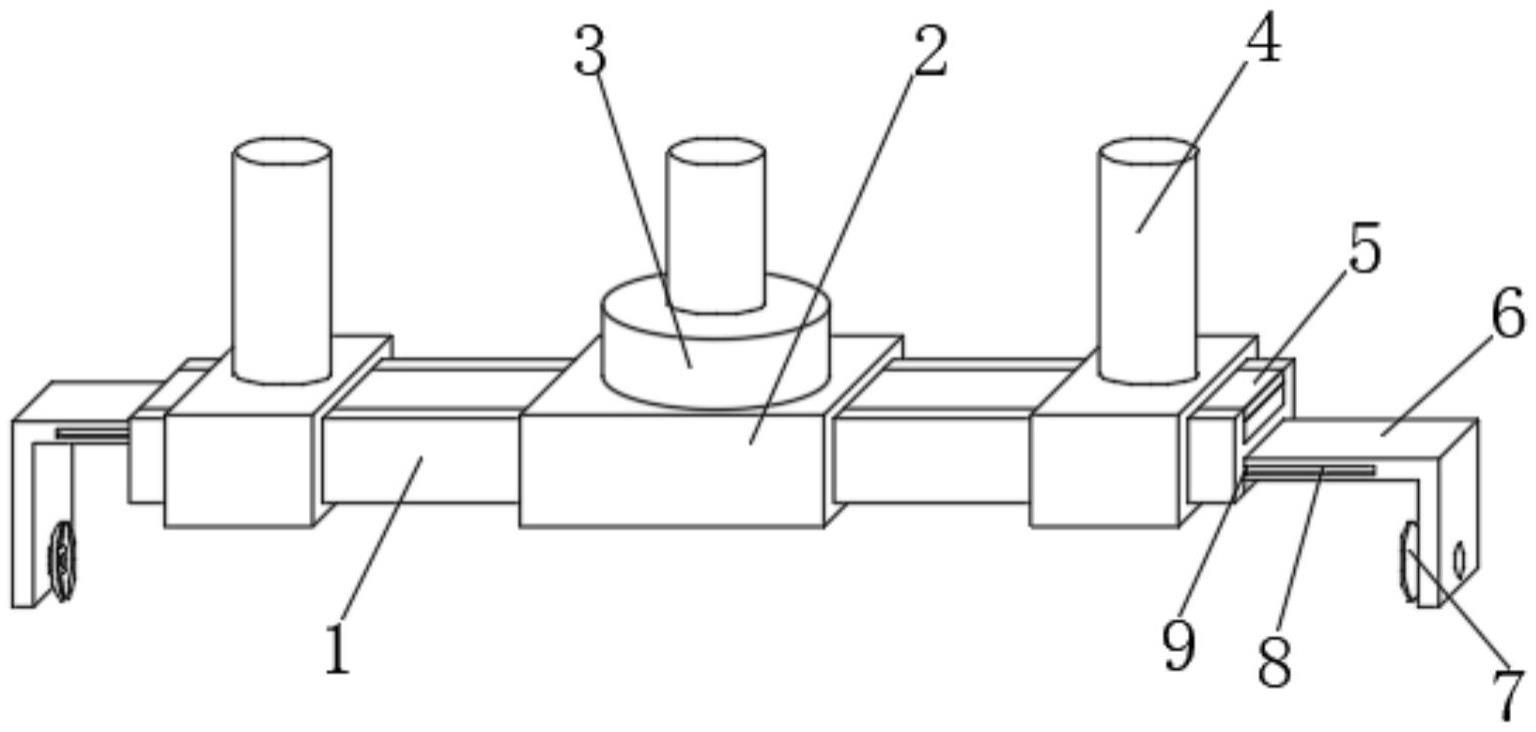
2、为实现上述目的,本实用新型提供如下技术方案:一种适用于长轴工件的抓手,包括主梁,所述主梁的上下两侧设置有直线导轨,所述直线导轨的一侧设置有夹持架,所述夹持架滑动安装在主梁内,所述夹持架的一端设置有夹持头。
3、优选的,所述夹持头设置为吸盘,且夹持头位于夹持架的两端一侧壁上。
4、优选的,所述夹持头设置为限位板,且限位板固定在夹持架的一端内侧。
5、优选的,所述主梁的外侧固定连接有固定套,所述主梁的中部通过连接座连接有连接座,所述主梁的两端通过固定套连接有导向轴。
6、优选的,所述连接座的内部滑动连接有缓冲滑板,所述缓冲滑板的下侧中部固定连接有下弹簧,所述缓冲滑板的上表面边缘设置有上弹簧。
7、优选的,所述夹持架的外侧开设有导向槽,所述主梁的内侧设置有导向滑块,所述导向滑块滑动安装在导向槽内。
8、与现有技术相比,本实用新型的有益效果是:
9、1.通过设计的直线导轨和夹持架,在使用时直线导轨和夹持架平行安装在主梁上,通过直线导轨驱动夹持架夹持在长轴物料的两端,在使用时方便对长轴物料抓起。
10、2.通过设计的连接座,在使用时通过连接座和固定套连接在升降设备上,在受力时缓冲滑板在连接座内滑动压缩在上弹簧和下弹簧上进行缓冲,在使用时可以减少连接出现受力损坏的现象。
技术特征:
1.一种适用于长轴工件的抓手,包括主梁(1),其特征在于:所述主梁(1)的上下两侧设置有直线导轨(5),所述直线导轨(5)的一侧设置有夹持架(6),所述夹持架(6)滑动安装在主梁(1)内,所述夹持架(6)的一端设置有夹持头(7)。
2.根据权利要求1所述的一种适用于长轴工件的抓手,其特征在于:所述夹持头(7)设置为吸盘,且夹持头(7)位于夹持架(6)的两端一侧壁上。
3.根据权利要求1所述的一种适用于长轴工件的抓手,其特征在于:所述夹持头(7)设置为限位板,且限位板固定在夹持架(6)的一端内侧。
4.根据权利要求1所述的一种适用于长轴工件的抓手,其特征在于:所述主梁(1)的外侧固定连接有固定套(2),所述主梁(1)的中部通过固定套(2)连接有连接座(3),所述主梁(1)的两端通过固定套(2)连接有导向轴(4)。
5.根据权利要求4所述的一种适用于长轴工件的抓手,其特征在于:所述连接座(3)的内部滑动连接有缓冲滑板(11),所述缓冲滑板(11)的下侧中部固定连接有下弹簧(12),所述缓冲滑板(11)的上表面边缘设置有上弹簧(10)。
6.根据权利要求1所述的一种适用于长轴工件的抓手,其特征在于:所述夹持架(6)的外侧开设有导向槽(8),所述主梁(1)的内侧设置有导向滑块(9),所述导向滑块(9)滑动安装在导向槽(8)内。
技术总结
本技术公开了一种适用于长轴工件的抓手,包括主梁,所述主梁的上下两侧设置有直线导轨,所述直线导轨的一侧设置有夹持架,所述夹持架滑动安装在主梁内,所述夹持架的一端设置有夹持头;所述主梁的外侧固定连接有固定套,所述主梁的中部通过连接座连接有连接座,所述主梁的两端通过固定套连接有导向轴;所述连接座的内部滑动连接有缓冲滑板,所述缓冲滑板的下侧中部固定连接有下弹簧,所述缓冲滑板的上表面边缘设置有上弹簧;所述夹持架的外侧开设有导向槽;通过设计的直线导轨和夹持架,在使用时直线导轨和夹持架平行安装在主梁上,通过直线导轨驱动夹持架夹持在长轴物料的两端,在使用时方便对长轴物料抓起。
技术研发人员:於志烨
受保护的技术使用者:泽田智能科技(常州)有限公司
技术研发日:20230330
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!