一种巡检机器人
本技术涉及设备巡检,特别是涉及一种巡检机器人。
背景技术:
1、在工业生产过程中,为保证设备正常运行,通常需要对各设备进行巡检监控,传统的人工巡检不仅费时费力,而且对工人的人身安全存在隐患。中国专利cn111055259a中公开了一种巡检机器人,以巡检机器人代替工人对设备进行巡检监控,并具体通过升降机构、第一驱动组件以及第二驱动组件的配合主要实现摄像单元相对于驱动座上升、下降或者相对于驱动座旋转。但是,摄像单元的位置调节能力仍然较为局限,灵活度较差,无法有效执行如监测仪表的示数等较为细致的监测任务。
技术实现思路
1、本实用新型的目的是提供一种巡检机器人,以解决上述现有技术存在的问题,能够有效地提高摄像单元的位置调节能力。
2、为实现上述目的,本实用新型提供了如下方案:
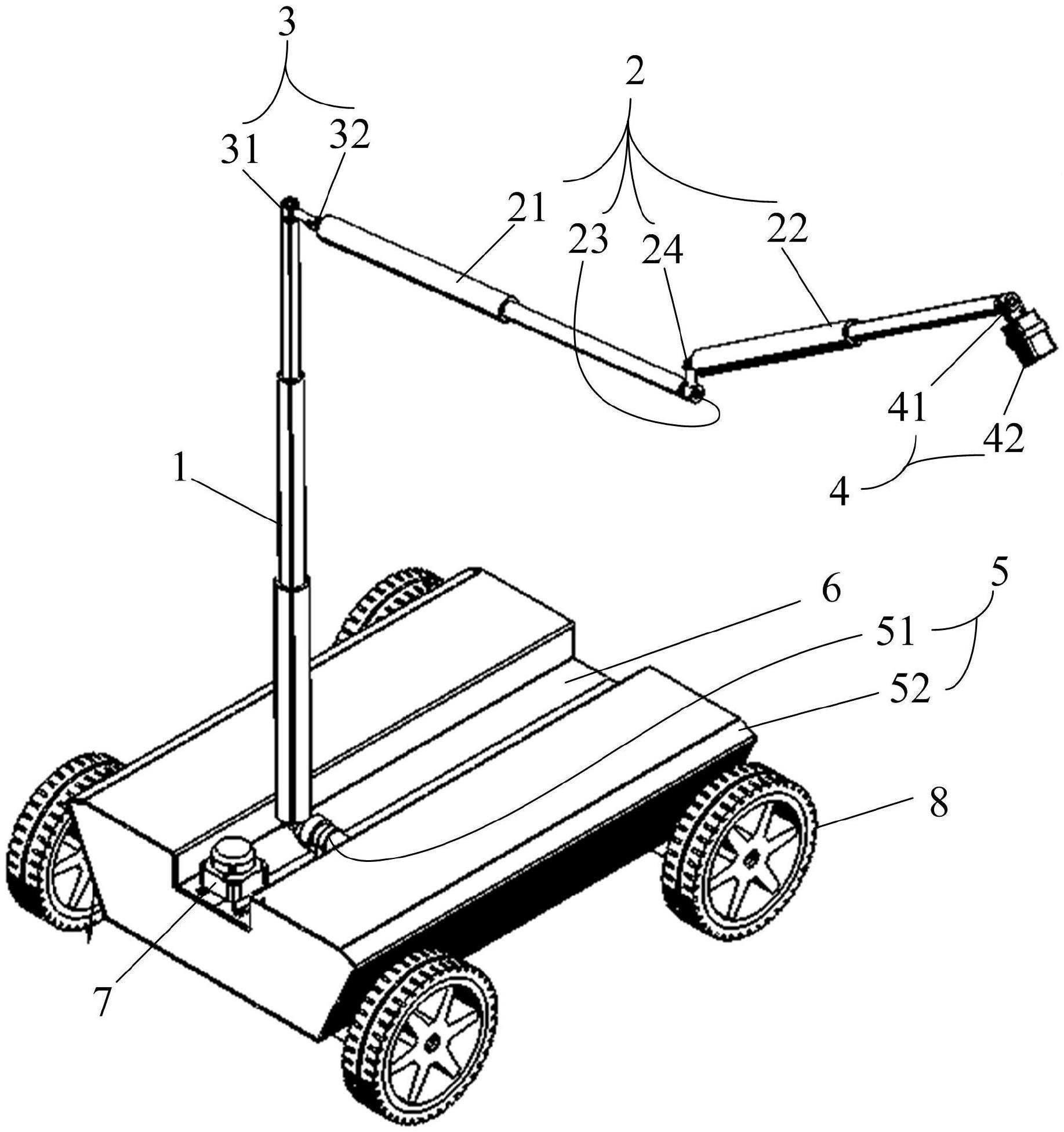
3、本实用新型提供一种巡检机器人,包括移动座、支撑杆、连杆、驱动组件以及摄像单元,所述移动座能够在地面上移动,所述支撑杆为第一伸缩杆,所述支撑杆的第一端用于设于所述移动座上,所述支撑杆的第二端用于向所述移动座的上方延伸,所述连杆为第二伸缩杆,所述连杆的一端用于绕第一轴线转动地设于所述支撑杆的第二端上,所述连杆的另一端用于在远离所述支撑杆的方向上延伸,所述摄像单元用于设于所述连杆远离所述支撑杆的一端上;所述驱动组件用于固定设于所述支撑杆的第二端上,且所述驱动组件用于与所述连杆传动连接,所述驱动组件能够为所述连杆绕所述第一轴线转动提供动力;所述第一轴线用于与所述支撑杆的中心线平行。
4、优选的,所述连杆包括第一连杆、第二连杆、第一驱动装置以及第二驱动装置,所述第一连杆为第三伸缩杆,所述第二连杆为第四伸缩杆;所述第一连杆的第一端用于绕所述第一轴线转动地设于所述支撑杆的第二端上,所述第一连杆的第一端用于与所述驱动组件传动连接,所述第一驱动装置用于固定设于所述第一连杆的第二端上,所述第一驱动装置用于与所述第二驱动装置传动连接,所述第二驱动装置用于与所述第二连杆的第一端传动连接,所述摄像单元用于设于所述第二连杆的第二端上;所述第一驱动装置能够为所述第二驱动装置以及所述第二连杆绕第二轴线转动提供动力,所述第二轴线用于与所述第一连杆的中心线平行;所述第二驱动装置能够为所述第二连杆绕第三轴线转动提供动力,所述第二连杆绕所述第三轴线转动能够使所述第二连杆的第二端在靠近或远离所述第一连杆的第一端的方向上移动。
5、优选的,所述摄像单元包括摄像头和第三驱动装置,所述第三驱动装置用于固定设于所述连杆远离所述支撑杆的一端上,所述第三驱动装置用于与所述摄像头的第一端传动连接,所述第三驱动装置能够为所述摄像头绕第四轴线转动提供动力,所述摄像头绕所述第四轴线转动能够使所述摄像头的第二端在靠近或远离所述支撑杆的第二端的方向上移动。
6、优选的,所述驱动组件包括第四驱动装置和第五驱动装置,所述第四驱动装置用于固定设于所述支撑杆的第二端上,所述第四驱动装置用于与所述第五驱动装置传动连接,所述第五驱动装置用于与所述连杆传动连接;所述第四驱动装置能够为所述第五驱动装置以及所述连杆绕所述第一轴线转动提供动力;所述第五驱动装置能够为所述连杆绕第五轴线转动提供动力,所述连杆绕所述第五轴线转动能够使所述连杆的远离所述支撑杆的第二端的一端在靠近或远离所述支撑杆的第一端的方向上移动。
7、优选的,所述移动座包括车体和第六驱动装置,所述第六驱动装置用于固定设于所述车体上,所述第六驱动装置用于与所述支撑杆的第一端传动连接,所述第六驱动装置能够为所述支撑杆绕第六轴线转动提供动力;所述支撑杆的第二端用于在远离所述车体的方向上延伸,且所述支撑杆绕所述第六轴线转动能够使所述支撑杆的第二端在靠近或远离所述车体的方向上移动。
8、优选的,所述车体上开设有容纳槽,所述容纳槽能够容纳所述支撑杆、所述连杆以及所述摄像单元。
9、优选的,所述车体包括车体本体、至少一个第七驱动装置以及至少三个车轮,各所述车轮能够转动地设于所述车体本体上,且各所述车轮转动能够带动所述车体本体移动,各所述第七驱动装置用于固定设于所述车体本体上,各所述第七驱动装置用于与各所述车轮传动连接,所述第七驱动装置能够为各所述车轮转动提供动力。
10、优选的,还包括扫描定位单元以及控制单元,所述扫描定位单元用于固定设于所述移动座上,所述扫描定位单元能够扫描所述移动座周围的情况并能够对所述移动座进行定位,所述控制单元用于固定设于所述移动座内,所述控制单元用于与所述扫描定位单元、所述摄像单元以及所述驱动组件通信连接,所述控制单元能够接收所述扫描定位单元发出的扫描信息以及定位信息,所述控制单元能够接收所述摄像单元拍摄到的信息并能够控制所述摄像单元运行,所述控制单元能够控制所述驱动组件运行。
11、本实用新型相对于现有技术取得了以下技术效果:
12、本实用新型提供的巡检机器人,设置支撑杆为第一伸缩杆,支撑杆伸长能够使支撑杆的第二端上升,进而使摄像单元上升,支撑杆缩短能够使支撑杆的第二端下降,进而使摄像单元下降,驱动组件驱动连杆绕第一轴线转动,进而使摄像单元能够绕第一轴线转动;设置连杆为第二伸缩杆,连杆伸长能够使摄像单元在远离支撑杆的方向上移动,连杆缩短能够使摄像单元在靠近支撑杆的方向上移动,当本实用新型提供的巡检机器人执行如监测仪表的示数等较为细致的监测任务时,能够通过使连杆伸长带动摄像单元向待监测物体靠近,从而避免由于摄像单元距离待监测物体较远而影响拍摄清晰度,待完成近距离拍摄后再通过使连杆缩短带动摄像单元向支撑杆靠近并复位,从而避免由于摄像单元伸出移动座的安全行驶范围而与其它设备等障碍物发生碰撞,因此,本实用新型提供的巡检机器人能够有效地提高摄像单元的位置调节能力。
技术特征:
1.一种巡检机器人,其特征在于:包括移动座、支撑杆、连杆、驱动组件以及摄像单元,所述移动座能够在地面上移动,所述支撑杆为第一伸缩杆,所述支撑杆的第一端用于设于所述移动座上,所述支撑杆的第二端用于向所述移动座的上方延伸,所述连杆为第二伸缩杆,所述连杆的一端用于绕第一轴线转动地设于所述支撑杆的第二端上,所述连杆的另一端用于在远离所述支撑杆的方向上延伸,所述摄像单元用于设于所述连杆远离所述支撑杆的一端上;所述驱动组件用于固定设于所述支撑杆的第二端上,且所述驱动组件用于与所述连杆传动连接,所述驱动组件能够为所述连杆绕所述第一轴线转动提供动力;所述第一轴线用于与所述支撑杆的中心线平行。
2.根据权利要求1所述的巡检机器人,其特征在于:所述连杆包括第一连杆、第二连杆、第一驱动装置以及第二驱动装置,所述第一连杆为第三伸缩杆,所述第二连杆为第四伸缩杆;所述第一连杆的第一端用于绕所述第一轴线转动地设于所述支撑杆的第二端上,所述第一连杆的第一端用于与所述驱动组件传动连接,所述第一驱动装置用于固定设于所述第一连杆的第二端上,所述第一驱动装置用于与所述第二驱动装置传动连接,所述第二驱动装置用于与所述第二连杆的第一端传动连接,所述摄像单元用于设于所述第二连杆的第二端上;所述第一驱动装置能够为所述第二驱动装置以及所述第二连杆绕第二轴线转动提供动力,所述第二轴线用于与所述第一连杆的中心线平行;所述第二驱动装置能够为所述第二连杆绕第三轴线转动提供动力,所述第二连杆绕所述第三轴线转动能够使所述第二连杆的第二端在靠近或远离所述第一连杆的第一端的方向上移动。
3.根据权利要求1所述的巡检机器人,其特征在于:所述摄像单元包括摄像头和第三驱动装置,所述第三驱动装置用于固定设于所述连杆远离所述支撑杆的一端上,所述第三驱动装置用于与所述摄像头的第一端传动连接,所述第三驱动装置能够为所述摄像头绕第四轴线转动提供动力,所述摄像头绕所述第四轴线转动能够使所述摄像头的第二端在靠近或远离所述支撑杆的第二端的方向上移动。
4.根据权利要求1所述的巡检机器人,其特征在于:所述驱动组件包括第四驱动装置和第五驱动装置,所述第四驱动装置用于固定设于所述支撑杆的第二端上,所述第四驱动装置用于与所述第五驱动装置传动连接,所述第五驱动装置用于与所述连杆传动连接;所述第四驱动装置能够为所述第五驱动装置以及所述连杆绕所述第一轴线转动提供动力;所述第五驱动装置能够为所述连杆绕第五轴线转动提供动力,所述连杆绕所述第五轴线转动能够使所述连杆的远离所述支撑杆的第二端的一端在靠近或远离所述支撑杆的第一端的方向上移动。
5.根据权利要求1所述的巡检机器人,其特征在于:所述移动座包括车体和第六驱动装置,所述第六驱动装置用于固定设于所述车体上,所述第六驱动装置用于与所述支撑杆的第一端传动连接,所述第六驱动装置能够为所述支撑杆绕第六轴线转动提供动力;所述支撑杆的第二端用于在远离所述车体的方向上延伸,且所述支撑杆绕所述第六轴线转动能够使所述支撑杆的第二端在靠近或远离所述车体的方向上移动。
6.根据权利要求5所述的巡检机器人,其特征在于:所述车体上开设有容纳槽,所述容纳槽能够容纳所述支撑杆、所述连杆以及所述摄像单元。
7.根据权利要求5所述的巡检机器人,其特征在于:所述车体包括车体本体、至少一个第七驱动装置以及至少三个车轮,各所述车轮能够转动地设于所述车体本体上,且各所述车轮转动能够带动所述车体本体移动,各所述第七驱动装置用于固定设于所述车体本体上,各所述第七驱动装置用于与各所述车轮传动连接,所述第七驱动装置能够为各所述车轮转动提供动力。
8.根据权利要求1所述的巡检机器人,其特征在于:还包括扫描定位单元以及控制单元,所述扫描定位单元用于固定设于所述移动座上,所述扫描定位单元能够扫描所述移动座周围的情况并能够对所述移动座进行定位,所述控制单元用于固定设于所述移动座内,所述控制单元用于与所述扫描定位单元、所述摄像单元以及所述驱动组件通信连接,所述控制单元能够接收所述扫描定位单元发出的扫描信息以及定位信息,所述控制单元能够接收所述摄像单元拍摄到的信息并能够控制所述摄像单元运行,所述控制单元能够控制所述驱动组件运行。
技术总结
本技术公开了一种巡检机器人,涉及设备巡检技术领域,包括移动座、支撑杆、连杆、驱动组件以及摄像单元,移动座能够在地面上移动,支撑杆为第一伸缩杆,支撑杆的第一端用于设于移动座上,支撑杆的第二端用于向移动座的上方延伸,连杆为第二伸缩杆,连杆的一端用于绕第一轴线转动地设于支撑杆的第二端上,连杆的另一端用于在远离支撑杆的方向上延伸,摄像单元用于设于连杆远离支撑杆的一端上;驱动组件用于固定设于支撑杆的第二端上,且驱动组件用于与连杆传动连接,驱动组件能够为连杆绕第一轴线转动提供动力;第一轴线用于与支撑杆的中心线平行;本技术公开的巡检机器人能够有效地提高摄像单元的位置调节能力。
技术研发人员:陈帅新,甘宝霖,卢锋,张聪炫,陈震
受保护的技术使用者:南昌航空大学
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!