一种仿生机械手的制作方法
本技术涉及机械手,具体涉及一种仿生机械手。
背景技术:
1、机械手是一种自动化机械装置,主要用于物品的夹取和转移等操作,随着科技的发展,机器人的应用范围也在不断扩大,从工业应用逐渐融入到日常生活。作为其中尤为重要的机器人末端的机械手,传统的机械手往往是从工业使用角度出发,采用双指型或者三指头设计的同步夹持结构对目标物进行拾取。
2、传统的机械手虽然能满足一定规格目标物的夹持,但日常生活应用中需要拾取到形状各异的物品,该传统机械手无法满足使用,因此需要一种能实现单根手指组的各指节弯曲与伸直的机械手结构。
技术实现思路
1、本实用新型的目的就在于提供一种仿生机械手,具有灵活性好、通用性强的特点。
2、为实现上述目的,本实用新型提供了以下技术方案:
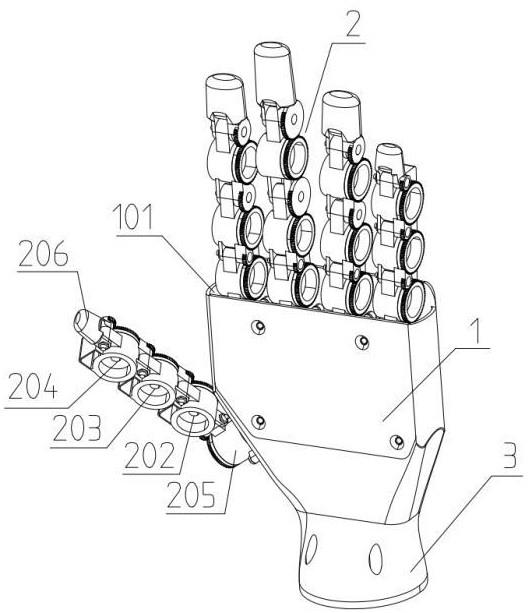
3、本实用新型提供的一种仿生机械手,包括机械手掌、以及五个可自由弯曲运动的手指组件,所述机械手掌的顶部开设有连通内腔的开口,其中四个手指组件安装在所述内腔并伸出于所述机械手掌;另一手指组件安装在所述机械手掌的侧边;五个所述手指组件在各个机械指节分别设有电机和传动部,自所述机械指节延伸形成所述传动部,各个所述电机与靠近的机械指节的所述传动部相互传动,以使各个靠近的机械指节进行收缩和伸展运动。
4、优选地,所述手指组件的所述机械指节包括依次相连的指根部、第一指节、第二指节、第三指节,所述指根部与第一、第二、第三指节的电机其转动方向相互垂直,以使各个所述手指组件可分别进行轴向弯曲运动。
5、优选地,所述第一、第二、第三指节包括有基座、电机及自所述基座一侧延伸形成的所述传动部、以及自所述基座另一侧延伸形成的安装部;所述传动部包括齿纹部和限位部,所述电机安装于所述基座的安装槽中,所述电机的输出端安装有齿轮,所述电机驱动所述齿轮以使靠近的机械指节的所述齿纹部啮合传动,所述齿纹部与所述限位部之间形成安装区,所述安装部通过紧固件铰链连接于靠近的机械指节的所述安装区。
6、优选地,所述基座的另一侧还延伸形成支撑部,所述支撑部与靠近的机械指节活动相抵,用于加强各个机械指节之间的受力强度。
7、优选地,所述指根部包括电机、基座、以及自所述基座一侧延伸形成的安装部,所述指根部连接于所述机械手掌,所述安装部通过紧固件与靠近的机械指节的所述安装区进行铰链连接。
8、优选地,所述机械指节还包括有与所述第三指节连接的指尖部,所述指尖部包括球状的端部,所述端部的一侧延伸形成传动部,所述传动部之间形成的安装区通过固定件与靠近的机械指节的所述安装部相铰接,通过靠近的机械指节的所述电机的齿轮与所述传动部的齿纹部的啮合传动,以使所述端部运动。
9、综上,本实用新型的有益效果在于:
10、1.通过在各个机械指节分别设有电机和传动部,通过后台对各个电机的单独控制,使其与传动部配合转动,控制手指组件的各个机械指节的开合角度,以使各个手指组件完成收缩和伸展的运动。
11、2.通过设置五个可自由弯曲运动的手指组件于机械手掌,其中四个手指组件安装在内腔并伸出于机械手掌;另一手指组件安装在机械手掌的侧边,形成模拟人手手掌握持的机械运动,能更为适配地完成对日常生活用品的控制。
12、本实用新型其余附加技术特征所具有的有益效果将在本说明书具体实施方式部分进行说明。
技术特征:
1.一种仿生机械手,其特征在于,包括机械手掌、以及五个可自由弯曲运动的手指组件,所述机械手掌的顶部开设有连通内腔的开口,其中四个所述手指组件安装在所述内腔并伸出于所述机械手掌;另一所述手指组件安装在所述机械手掌的侧边;五个所述手指组件的各个机械指节分别设有电机和传动部,自所述机械指节延伸形成所述传动部,各个所述电机与靠近的机械指节的所述传动部相互传动连接,以使各个相邻的机械指节进行收缩和伸展运动。
2.根据权利要求1所述的仿生机械手,其特征在于,所述手指组件的所述机械指节包括依次相连的指根部、第一指节、第二指节、第三指节,所述指根部与第一、第二、第三指节的电机其转动方向相互垂直,以使各个所述手指组件可分别进行轴向弯曲运动。
3.根据权利要求2所述的仿生机械手,其特征在于,所述第一、第二、第三指节包括有基座、电机及自所述基座一侧延伸形成的所述传动部、以及自所述基座另一侧延伸形成的安装部;所述传动部包括齿纹部和限位部,所述电机安装于所述基座的安装槽中,所述电机的输出端安装有齿轮,所述电机驱动所述齿轮以使靠近的机械指节的所述齿纹部啮合传动,所述齿纹部与所述限位部之间形成安装区,所述安装部通过紧固件铰链连接于靠近的机械指节的所述安装区。
4.根据权利要求3所述的仿生机械手,其特征在于,所述基座的另一侧还延伸形成支撑部,所述支撑部与靠近的机械指节活动相抵。
5.根据权利要求4所述的仿生机械手,其特征在于,所述指根部包括电机、基座、以及自所述基座一侧延伸形成的安装部,所述指根部连接于所述机械手掌,所述安装部通过紧固件与靠近的机械指节的所述安装区进行铰链连接。
6.根据权利要求5所述的仿生机械手,其特征在于,所述机械指节还包括有与所述第三指节连接的指尖部,所述指尖部包括球状的端部,所述端部的一侧延伸形成传动部,所述传动部之间形成的安装区通过固定件与靠近的机械指节的所述安装部相铰接,通过靠近的机械指节的所述电机的齿轮与所述传动部的齿纹部的啮合传动,以使所述端部运动。
技术总结
本技术公开了一种仿生机械手,包括机械手掌、以及五个可自由弯曲运动的手指组件,所述机械手掌的顶部开设有连通内腔的开口,其中四个所述手指组件安装在所述内腔并伸出于所述机械手掌;另一所述手指组件安装在所述机械手掌的侧边;五个所述手指组件的各个机械指节分别设有电机和传动部,自所述机械指节延伸形成所述传动部,各个所述电机与靠近的机械指节的所述传动部相互传动连接,以使各个相邻的机械指节进行收缩和伸展运动,本技术具有灵活性好、通用性强的特点。
技术研发人员:何锋
受保护的技术使用者:广州煌牌自动设备有限公司
技术研发日:20230401
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!