一种自动焊接智能制造生产线搬运抓手的制作方法
本技术属于生产线搬运抓手,特别涉及一种自动焊接智能制造生产线搬运抓手。
背景技术:
1、在目前的工业化大生产中,焊接是常用的一种制造工艺,也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,通过焊接可以使两种或两种以上同种或异种材料通过原子或分子之间的结合和扩散连接成一体,而现有技术中的焊接大多数都还是通过人工手动进行,企业需要招收电焊专业技术人员,增加了人力成本,另一方面人工焊接的质量深受焊工技术能力的影响,难以把控,且人工焊接的效率较低,生产模式难以满足大批量、大规模转型要求,因此,我们提供一种自动焊接智能制造生产线搬运抓手来解决以上的问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种自动焊接智能制造生产线搬运抓手,解决上述背景技术中提出的问题。
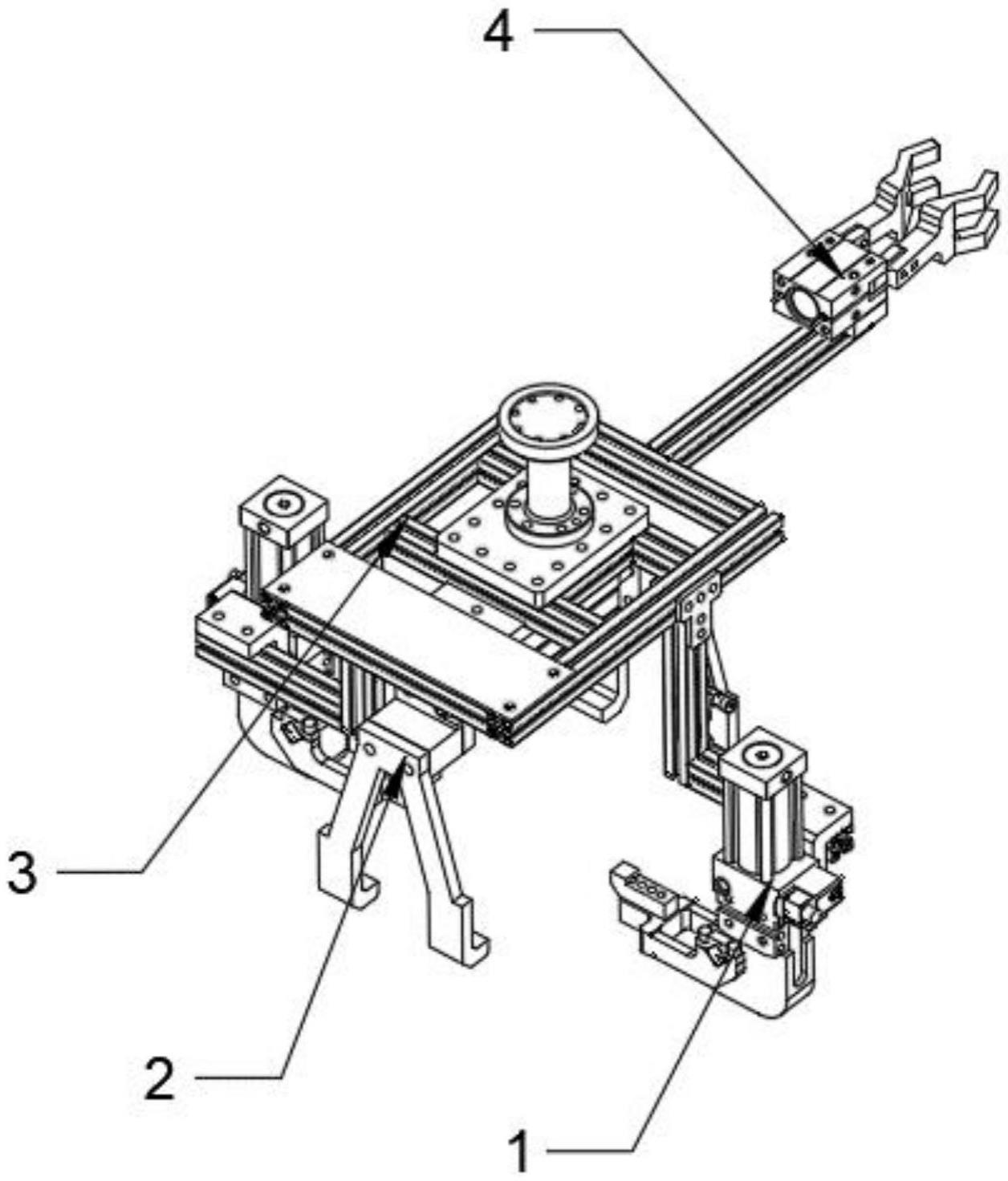
2、本实用新型通过以下的技术方案实现:一种自动焊接智能制造生产线搬运抓手,包括:夹爪组件一、夹爪组件二、安装组件、夹爪组件三,所述安装组件包括型材架、连接块一以及连接法兰,所述型材架上侧安装有连接块一,所述连接块一上侧安装有连接法兰,所述连接法兰与工业机器人连接;
3、所述型材架前侧中间固定有一字形铝型材,所述一字形铝型材上安装有夹爪组件一;
4、所述型材架左端中间、右端中间分别固定有一个l形铝型材,每一个所述l形铝型材下端均安装有一个夹爪组件二,所述型材架下表面中间安装有夹爪组件三。
5、作为一优选的实施方式,所述夹爪组件一包括气动手指、连接块二以及夹爪一;
6、所述气动手指前端左侧、右侧分别活动安装有一个夹爪一,两个所述夹爪一呈钳式结构分布。
7、作为一优选的实施方式,所述气动手指下端安装有连接块二,所述气动手指通过连接块二活动安装在型材架前侧中间的一字形铝型材上侧。
8、作为一优选的实施方式,所述夹爪组件二包括气缸一、夹爪二以及连接块三,所述气缸一下端前侧通过连接块三固定在l形铝型材下端外侧;
9、所述气缸一下端活动安装有夹爪二。
10、作为一优选的实施方式,所述夹爪组件三包括气缸二、连接块四以及夹爪三,所述气缸二上侧与型材架上表面的连接块一下侧固定连接;
11、所述气缸二前端、后端分别安装有一个连接块四。
12、作为一优选的实施方式,每一个所述连接块四下侧均固定有一个夹爪三,所述夹爪三呈v字形结构;
13、每一个所述夹爪三下端均设置有一个限位凸块,所述限位凸块与夹爪三主体呈垂直结构。
14、采用了上述技术方案后,本实用新型的有益效果是:通过设置夹爪组件一,能够对多种物件进行夹取,并可对已经加工完成的工件进行清洗、烘干、抛光、打标工作;
15、夹爪组件二和夹爪组件三的设置,能够从agv搬运车的料盒中将工件取出,能够对体积较大的工件进行搬运,多个夹爪的配合使用,提升了整个搬运抓手的使用范围,使得搬运抓手能够胜任更多的物件的搬运工作。
技术特征:
1.一种自动焊接智能制造生产线搬运抓手,包括:夹爪组件一(4)、夹爪组件二(1)、安装组件(3)、夹爪组件三(2),其特征在于,所述安装组件(3)包括型材架(5)、连接块一(7)以及连接法兰(6),所述型材架(5)上侧安装有连接块一(7),所述连接块一(7)上侧安装有连接法兰(6),所述连接法兰(6)与工业机器人连接;
2.如权利要求1所述的一种自动焊接智能制造生产线搬运抓手,其特征在于:所述夹爪组件一(4)包括气动手指(8)、连接块二(9)以及夹爪一(10);
3.如权利要求2所述的一种自动焊接智能制造生产线搬运抓手,其特征在于:所述气动手指(8)下端安装有连接块二(9),所述气动手指(8)通过连接块二(9)活动安装在型材架(5)前侧中间的一字形铝型材上侧。
4.如权利要求3所述的一种自动焊接智能制造生产线搬运抓手,其特征在于:所述夹爪组件二(1)包括气缸一(11)、夹爪二(13)以及连接块三(12),所述气缸一(11)下端前侧通过连接块三(12)固定在l形铝型材下端外侧;
5.如权利要求4所述的一种自动焊接智能制造生产线搬运抓手,其特征在于:所述夹爪组件三(2)包括气缸二(16)、连接块四(15)以及夹爪三(14),所述气缸二(16)上侧与型材架(5)上表面的连接块一(7)下侧固定连接;
6.如权利要求5所述的一种自动焊接智能制造生产线搬运抓手,其特征在于:每一个所述连接块四(15)下侧均固定有一个夹爪三(14),所述夹爪三(14)呈v字形结构;
技术总结
本技术提供一种自动焊接智能制造生产线搬运抓手,包括:夹爪组件一、夹爪组件二、安装组件、夹爪组件三,所述安装组件包括型材架、连接块一以及连接法兰,所述型材架上侧安装有连接块一,所述连接块一上侧安装有连接法兰,所述连接法兰与工业机器人连接,与现有技术相比,本技术具有如下的有益效果:通过设置夹爪组件一,能够对多种物件进行夹取,并可对已经加工完成的工件进行清洗、烘干、抛光、打标工作,夹爪组件二和夹爪组件三的设置,能够从AGV搬运车的料盒中将工件取出,能够对体积较大的工件进行搬运,多个夹爪的配合使用,提升了整个搬运抓手的使用范围,使得搬运抓手能够胜任更多的物件的搬运工作。
技术研发人员:郑植
受保护的技术使用者:福尼斯智能装备(珠海)有限公司
技术研发日:20230403
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!