一种吊轨式巡检机器人的制作方法
本技术涉及巡检机器人,具体为一种吊轨式巡检机器人。
背景技术:
1、巡检机器人主要用于机房内进行设备检测、机房环境检测、机房资产盘点、机房人员安防等工作,相比较传统人工巡检,该款机房巡检机器人更效率、更精准、更低成本,吊轨式巡检机器人便属于巡检机器人的一种。
2、例如授权公告号cn214818594u的及一种吊轨式巡检机器人,包括:机器人本体。本申请采用激光雷达扫描探测吊轨式巡检机器人前、后方区域,受外界环境影响小,准确率高,可以及时发现悬空或者低矮障碍物,避免因碰到障碍物造成碰撞事故,满足设备和人员的安全需要。
3、上述对比专利中的轨式巡检机器人,是在轨道连接装置的下方固定连接机器人本体,通过机器人本体上的结构实现巡检,但是,由于机器人本体是与轨道连接装置固定,这样当机器人本体使用一段时间后需要进行保养维护或者出现故障需要进行维修时便不利于进行拆卸,从而比较费时费力,同时上述对比专利中的轨式巡检机器人,由于没有在机器人本体处设置横向和纵向调节的结构,这样机器人本体的巡检视角范围便始终是固定的,无法对其他高度或其他方向进行巡检,进而便降低了轨式巡检机器人的使用效果。
技术实现思路
1、本实用新型的目的是为了解决上述对比专利中的轨式巡检机器人,由于机器人本体是与轨道连接装置固定,不利于进行拆卸维修和维护,无法对机器人本体其他高度或其他方向进行巡检,而提出的一种吊轨式巡检机器人。
2、为实现上述目的,本实用新型提供如下技术方案:
3、设计一种吊轨式巡检机器人,包括轨道和移动机构,所述轨道的外壁连接有移动机构,所述移动机构的下方固接有凹形板,所述凹形板的下方安装有顶板,且顶板的上方外壁与凹形板的凹槽处内壁间隙配合,所述顶板的左右两侧安装有固定装置,所述固定装置的下方安装有巡检装置。
4、优选的,所述固定装置包括巡检机器人本体,所述巡检机器人本体的上方与顶板相固接,所述巡检机器人本体的左右两侧上方均设有多个卡块,且卡块的外壁与顶板的凹槽处内壁间隙配合,左右所述卡块的外侧固接有挡杆,且挡杆的外壁与凹形板的通孔处内壁间隙配合,所述卡块的前端面通过转轴转动连接有连杆,且连杆的另一端通过转轴转动连接有矩形块,所述矩形块的下方转动连接有螺杆。
5、优选的,所述螺杆的下方外壁螺纹连接有第一横板,且第一横板的外侧与凹形板相固接。
6、优选的,所述螺杆的下表面固接有转头。
7、优选的,所述巡检装置包括第二横板,所述第二横板的外壁与巡检机器人本体的内壁相固接,所述第二横板的内部固接有电推杆,且电推杆的下方外壁与巡检机器人本体的通孔处内壁间隙配合,所述电推杆的下方固接有壳体,所述壳体的内部通过若干螺栓螺纹连接有机座,且机座的内部中间固接有电机,所述电机的输出轴固接有转盘,且转盘的上方外壁通过轴承与壳体转动相连。
8、优选的,所述壳体的下方固接有巡检机构。
9、本实用新型提出的一种吊轨式巡检机器人,有益效果在于:可以通过巡检机器人本体带动顶板移动,使顶板的上方进入到凹形板的凹槽内,再转动转头,使转头带动螺杆进行转动,螺杆通过第一横板可以向上移动,这样螺杆通过矩形块便可以对连杆进行挤压,使连杆配合挡杆来推动卡块移动,使卡块进入到的顶板的凹槽内,这样卡块配合凹形板便可以将顶板固定,以此将顶板下方的巡检机器人本体固定,反之也方便对巡检机器人本体进行拆卸维修或保养维护,从而更加的省时省力;
10、可以通过移动机构配合轨道带动此装置移动,当需要对其他高度或其他方向进行巡检时,可以启动电推杆,使电推杆带动壳体移动,这样壳体通过转盘便可以带动巡检机构移动,对巡检机构的高度进行调节,再启动电机,使电机的输出轴带动转盘进行转动,使转盘带动巡检机构转动,这样便可以提高巡检视角范围,从而也就提高了轨式巡检机器人的使用效果。
技术特征:
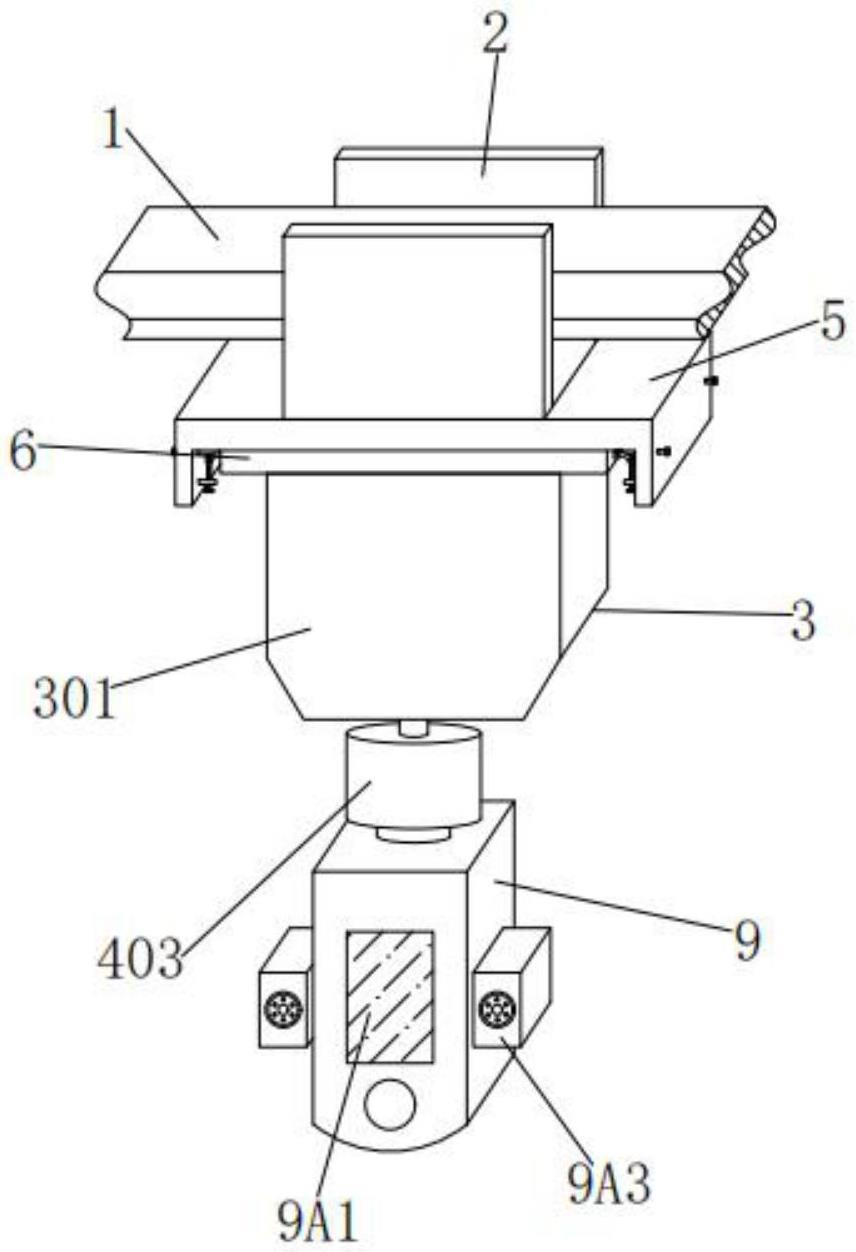
1.一种吊轨式巡检机器人,包括轨道(1)和移动机构(2),所述轨道(1)的外壁连接有移动机构(2),其特征在于:所述移动机构(2)的下方固接有凹形板(5),所述凹形板(5)的下方安装有顶板(6),且顶板(6)的上方外壁与凹形板(5)的凹槽处内壁间隙配合,所述顶板(6)的左右两侧安装有固定装置(3),所述固定装置(3)的下方安装有巡检装置(4);
2.根据权利要求1所述的一种吊轨式巡检机器人,其特征在于:所述螺杆(306)的下方外壁螺纹连接有第一横板(7),且第一横板(7)的外侧与凹形板(5)相固接。
3.根据权利要求1所述的一种吊轨式巡检机器人,其特征在于:所述螺杆(306)的下表面固接有转头(8)。
4.根据权利要求1所述的一种吊轨式巡检机器人,其特征在于:所述巡检装置(4)包括第二横板(401),所述第二横板(401)的外壁与巡检机器人本体(301)的内壁相固接,所述第二横板(401)的内部固接有电推杆(402),且电推杆(402)的下方外壁与巡检机器人本体(301)的通孔处内壁间隙配合,所述电推杆(402)的下方固接有壳体(403),所述壳体(403)的内部通过若干螺栓螺纹连接有机座(404),且机座(404)的内部中间固接有电机(405),所述电机(405)的输出轴固接有转盘(406),且转盘(406)的上方外壁通过轴承与壳体(403)转动相连。
5.根据权利要求4所述的一种吊轨式巡检机器人,其特征在于:所述壳体(403)的下方固接有巡检机构(9)。
技术总结
本技术涉及巡检机器人技术领域,尤其是一种吊轨式巡检机器人,包括轨道和移动机构,所述顶板的左右两侧安装有固定装置,所述固定装置的下方安装有巡检装置。可以通过巡检机器人本体带动顶板移动,使顶板的上方进入到凹形板的凹槽内,再转动转头,使转头带动螺杆进行转动,螺杆通过第一横板可以向上移动,这样螺杆通过矩形块便可以对连杆进行挤压,使连杆配合挡杆来推动卡块移动,使卡块进入到的顶板的凹槽内,这样卡块配合凹形板便可以将顶板固定,以此将顶板下方的巡检机器人本体固定,反之也方便对巡检机器人本体进行拆卸维修或保养维护,从而更加的省时省力。
技术研发人员:唐庆斌,回晓帅
受保护的技术使用者:大连凯萨科技有限公司
技术研发日:20230411
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!