一种欠驱仿生灵巧手
本技术涉及智能机械工程,具体涉及一种欠驱仿生灵巧手
背景技术:
1、当前机器人领域的发展呈现多元化、智能化等趋势,机器人由执行机构、驱动装置、感知装置和控制系统构成,在机器人的诸多组件当中,其中末端执行器的效率直接影响着机器人整体的工作效率。传统的末端执行器多为夹持式或吸附式末端执行器,在面对一些极端环境和复杂工况的时候,工作效率不高且对复杂极端工作环境适应性不足。灵巧手作为结合了仿生学的新型末端执行器,不仅灵巧性高、适应性强,而且可以完成多种不同类型的复杂操作,弥补了传统末端执行器功能单一等缺陷。
2、对于仿人灵巧手可依据不同驱动方式将其分为两大类,一类是全驱动仿人灵巧手,另一类是欠驱动仿人灵巧手。其由过去的体积大、重量大、灵敏度低等特点向现在的体积小、重量轻、高灵敏度逐步进化。近年来为满足更高的拟人化工作需求,国内外学者及实验室在欠驱动灵巧手的研究方面取得了较大进展,研制的灵巧手驱动方式大部分采用欠驱动取代全驱动方式,且目前欠驱动灵巧手多使用腱绳控制关节运动。
3、对于实现灵巧手的人机交互来说,其设备由最初的操作复杂的旋钮按键遥控器,过渡到配置多传感器的数据手套,再到反馈灵敏、体积小、重量轻的体感手势传感器设备,正在朝着简易化、轻量化的方向发展,而现有灵巧手存在体积过大、结构过于复杂、动作僵化以及仿人程度不高等问题。
技术实现思路
1、有鉴于此,有必要提供一种欠驱仿生灵巧手,用以解决现有技术中灵巧手体积过大、结构过于复杂、动作僵化以及仿人程度不高的技术问题。
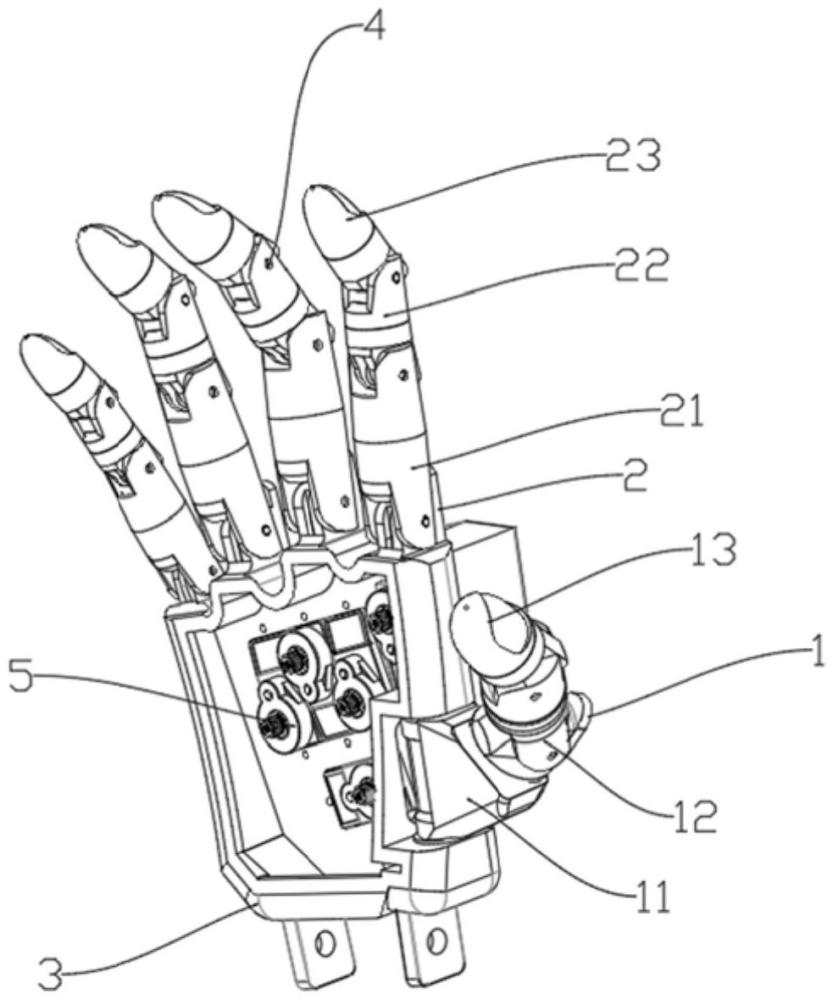
2、一方面,本实用新型提供了一种欠驱仿生灵巧手,包括一个手掌、五个手指、控制板以及舵机,所述五个手指为与所述手掌连接的拇指、食指、中指、无名指和小拇指;
3、其中,所述拇指包括关节、驱动手指弯曲的腱绳、掌骨、近端指骨和远端指骨;所述食指、所述中指、所述无名指和所述小拇指的结构相同,均包括关节、驱动手指弯曲的腱绳、远端指节、中间指节和近端指节;在所述拇指与所述手掌连接的掌指关节处设置有指根行程限制器,在所述食指、所述中指、所述无名指和所述小拇指与手掌连接的掌指关节处、所述中间指节以及所述远端指节均设置有所述指根行程限制器。
4、可选的,所述拇指的掌指关节处的轴线相对于腕掌关节的回转处轴线作预设角度的旋转。
5、可选的,所述腱绳的绕线方式为达芬奇式配合带轮式。
6、可选的,所述腱绳采用pbo纤维绳。
7、可选的,所述舵机采用微型串行总线数字舵机。
8、可选的,所述五个手指的各关节之间采用圆柱销进行连接。
9、可选的,所述舵机与所述手掌的背部采用螺纹螺孔连接。
10、可选的,所述手掌的外形采用拱形曲面构造。
11、采用上述实施例的有益效果是:本实用新型提供的欠驱仿生灵巧手包括一个手掌、五个手指、控制板以及舵机,五个手指为与手掌连接的拇指、食指、中指、无名指和小拇指;其中,拇指包括关节、驱动手指弯曲的腱绳、掌骨、近端指骨和远端指骨;食指、中指、无名指和小拇指的结构相同,均包括关节、驱动手指弯曲的腱绳、远端指节、中间指节和近端指节;在拇指与手掌连接的掌指关节处设置有指根行程限制器,在食指、中指、无名指和小拇指与手掌连接的掌指关节处、中间指节以及远端指节均设置有所述指根行程限制器。本实用新型采用腱绳传动方式设计制作,符合轻量化、简易化原则,相比传统控制模式的齿轮、连杆驱动灵巧手,本实用新型可以完成仿人柔性工作,选用的舵机体积小,使得灵巧手本身更加轻便灵活,解决了当前研制的工业机器人装载的灵巧手体积过大、结构过于复杂、动作僵化以及仿人程度不高的技术问题。
技术特征:
1.一种欠驱仿生灵巧手,其特征在于,包括一个手掌、五个手指、控制板以及舵机,所述五个手指为与所述手掌连接的拇指、食指、中指、无名指和小拇指;
2.根据权利要求1所述的欠驱仿生灵巧手,其特征在于,所述拇指的掌指关节处的轴线相对于腕掌关节的回转处轴线作预设角度的旋转。
3.根据权利要求1所述的欠驱仿生灵巧手,其特征在于,所述腱绳的绕线方式为达芬奇式配合带轮式。
4.根据权利要求3所述的欠驱仿生灵巧手,其特征在于,所述腱绳采用pbo纤维绳。
5.根据权利要求4所述的欠驱仿生灵巧手,其特征在于,所述舵机采用微型串行总线数字舵机。
6.根据权利要求5所述的欠驱仿生灵巧手,其特征在于,所述五个手指的各关节之间采用圆柱销进行连接。
7.根据权利要求6所述的欠驱仿生灵巧手,其特征在于,所述舵机与所述手掌的背部采用螺纹螺孔连接。
8.根据权利要求7所述的欠驱仿生灵巧手,其特征在于,所述手掌的外形采用拱形曲面构造。
技术总结
本技术提供了一种欠驱仿生灵巧手,该欠驱仿生灵巧手包括包括一个手掌、五个手指、控制板以及舵机,五个手指为与手掌连接的拇指、食指、中指、无名指和小拇指;其中,拇指包括关节、驱动手指弯曲的腱绳、掌骨、近端指骨和远端指骨;食指、中指、无名指和小拇指的结构相同,均包括关节、驱动手指弯曲的腱绳、远端指节、中间指节和近端指节;在拇指与手掌连接的掌指关节处设置有指根行程限制器,在食指、中指、无名指和小拇指与手掌连接的掌指关节处、中间指节以及远端指节均设置有所述指根行程限制器。本技术仿人程度高、轻便灵活,解决了灵巧手体积过大、结构过于复杂、动作僵化以及仿人程度不高的技术问题。
技术研发人员:王峥宇,陈耀轩,张立,周子尧,王梓杭,陈维岩,陈浪,朱传彪,梅杰,陈定方,陈昆
受保护的技术使用者:武汉理工大学
技术研发日:20230411
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!