自动化夹取装置
本技术涉及夹取装置,具体地说就是自动化夹取装置。
背景技术:
1、在工业生产自动化生产过程中,许许多多的地方都需要用到夹取装置以实现产品位置的转换或进一步加工,自动化夹取装置可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工等部门。
2、现有技术中夹持装置的夹取形式较为单一,多通过电机驱动夹持爪对物体进行夹持,夹持过程中会对物体产生挤压,若夹持物质的质地较软时,则容易造成物体的损坏。
3、本新型要解决的技术问题是:因此需要设计一种自动化夹取装置,方便对质地较软的物质进行夹持,减少对物体造成损坏,提高夹取效率。
技术实现思路
1、为解决上述问题,本实用新型提供了自动化夹取装置。
2、本实用新型解决其技术问题所采取的技术方案是:自动化夹取装置,包括夹持臂和夹持部分,所述夹持部分包括固定部分和活动部分,所述固定部分与活动部分之间连接有驱动组件,所述固定部分包括固定座和第一夹持爪,第一夹持爪与固定座转动连接,所述固定座连接于夹持臂的下端,活动部分包括活动座和第二夹持爪,所述第二夹持爪与活动座转动连接。
3、作为优化,所述驱动组件用于驱动活动部分移动,所述驱动组件包括驱动电机和驱动螺杆,所述驱动电机的外壳与固定座固连,所述驱动螺杆与驱动电机的输出轴固连,所述活动座的内部开设有连接螺孔,所述连接螺孔与驱动螺杆配合连接,所述驱动组件的数量不小于2。
4、作为优化,所述固定座长度方向两端向内凹陷形成连接腔,所述连接腔为水平设置的圆柱状,所述活动座的结构与固定座的结构相同。
5、作为优化,所述第一夹持爪与第二夹持爪的结构相同,所述第一夹持爪宽度方向的上部设有连接臂,所述连接臂的上端连接有调节柱,所述调节柱转动连接于连接腔内,所述固定座的上侧连接有顶紧螺栓,顶紧螺栓的下端穿过固定座与调节柱接触。
6、作为优化,所述第一夹持爪包括支撑架和辅助带,所述支撑架包括两个相对平行设置的支撑骨架,所述支撑骨架的下部为水平,所述支撑骨架的中部向外弯曲呈弧形,相邻两个支撑骨架之间均匀连接有若干个支撑筋,所述辅助带包覆于支撑筋的外侧;
7、两个支撑骨架的上端连接有驱动辊,所述驱动辊的其中一端连接有夹持电机,两个支撑骨架的下端之间转动连接有导向杆。
8、作为优化,两个所述支撑骨架的相对侧均设有若干个限位块,所述辅助带设置于限位块的内侧。
9、本方案的有益效果是,自动化夹取装置,具有以下有益之处:
10、通过固定部分和活动部分对物体进行夹持,第一夹持爪和第二夹持爪上转动连接有辅助带,在第一夹持爪和第二夹持爪对物体进行夹持时,通过辅助带对物体进行驱动,使物体进入到第一夹持爪和第二夹持爪的内部,实现对物体的夹持,减少夹持过程中对物体的挤压,提高对物体的夹持效率和夹持效率。
技术特征:
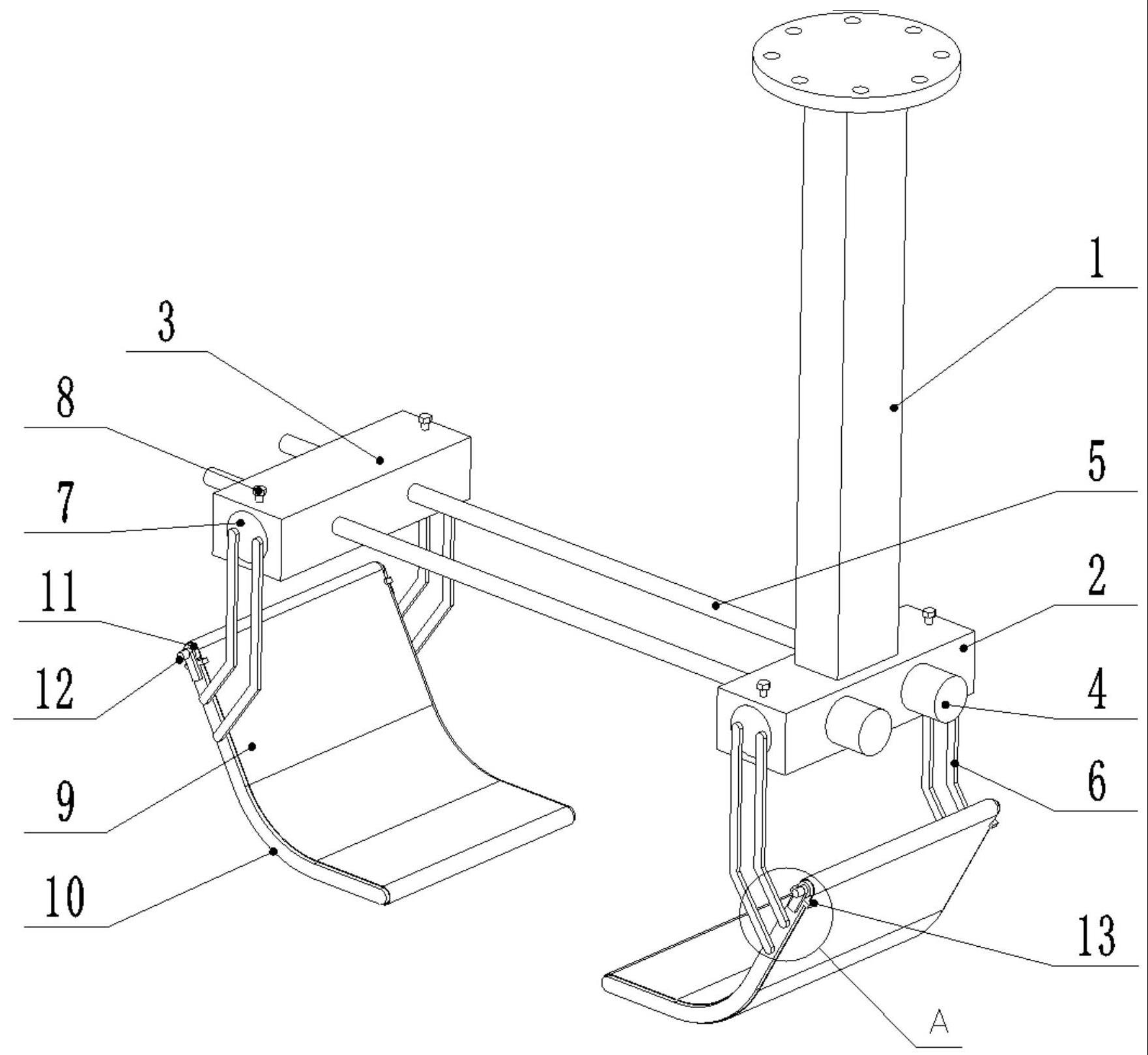
1.自动化夹取装置,包括夹持臂(1)和夹持部分,其特征在于:所述夹持部分包括固定部分和活动部分,所述固定部分与活动部分之间连接有驱动组件,所述固定部分包括固定座(2)和第一夹持爪,第一夹持爪与固定座(2)转动连接,所述固定座(2)连接于夹持臂(1)的下端,活动部分包括活动座(3)和第二夹持爪,所述第二夹持爪与活动座(3)转动连接。
2.根据权利要求1所述的自动化夹取装置,其特征在于:所述驱动组件用于驱动活动部分移动,所述驱动组件包括驱动电机(4)和驱动螺杆(5),所述驱动电机(4)的外壳与固定座(2)固连,所述驱动螺杆(5)与驱动电机(4)的输出轴固连,所述活动座(3)的内部开设有连接螺孔,所述连接螺孔与驱动螺杆(5)配合连接,所述驱动组件的数量不小于2。
3.根据权利要求1所述的自动化夹取装置,其特征在于:所述固定座(2)长度方向两端向内凹陷形成连接腔,所述连接腔为水平设置的圆柱状,所述活动座(3)的结构与固定座(2)的结构相同。
4.根据权利要求3所述的自动化夹取装置,其特征在于:所述第一夹持爪与第二夹持爪的结构相同,所述第一夹持爪宽度方向的上部设有连接臂(6),所述连接臂(6)的上端连接有调节柱(7),所述调节柱(7)转动连接于连接腔内,所述固定座(2)的上侧连接有顶紧螺栓(8),顶紧螺栓(8)的下端穿过固定座(2)与调节柱(7)接触。
5.根据权利要求4所述的自动化夹取装置,其特征在于:所述第一夹持爪包括支撑架和辅助带(9),所述支撑架包括两个相对平行设置的支撑骨架(10),所述支撑骨架(10)的下部为水平,所述支撑骨架(10)的中部向外弯曲呈弧形,相邻两个支撑骨架(10)之间均匀连接有若干个支撑筋,所述辅助带(9)包覆于支撑筋的外侧;
6.根据权利要求5所述的自动化夹取装置,其特征在于:两个所述支撑骨架(10)的相对侧均设有若干个限位块(13),所述辅助带(9)设置于限位块(13)的内侧。
技术总结
本技术涉及夹取装置技术领域,具体地说就是自动化夹取装置,包括夹持臂和夹持部分,所述夹持部分包括固定部分和活动部分,所述固定部分与活动部分之间连接有驱动组件,所述固定部分包括固定座和第一夹持爪,第一夹持爪与固定座转动连接,所述固定座连接于夹持臂的下端,活动部分包括活动座和第二夹持爪,所述第二夹持爪与活动座转动连接,通过固定部分和活动部分对物体进行夹持,第一夹持爪和第二夹持爪上转动连接有辅助带,在第一夹持爪和第二夹持爪对物体进行夹持时,通过辅助带对物体进行驱动,使物体进入到第一夹持爪和第二夹持爪的内部,实现对物体的夹持,减少夹持过程中对物体的挤压,提高对物体的夹持效率和夹持效率。
技术研发人员:王永彬,李冀,刘智渊,孙凯迪
受保护的技术使用者:临沂科技职业学院
技术研发日:20230417
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!