一种多轴联动便于改装零部件的多轴机械手
本技术属于机械手,具体地说,涉及多轴联动便于改装零部件的多轴机械手。
背景技术:
1、机械手是一种通过自身结构,在货物搬运、零部件操作上达成自动化效果,提升加工精度,并提升加工效率的专业装置,在机械手的实际使用过程中,由于传统类型机械手在自身结构上,往往采用整装式结构,不方便进行拆卸,但机械手在实际操作中,往往需要根据实际需要更换驱动部件,常规类型机械手无法满足该项需求,需要进行改进。
2、有鉴于此特提出本实用新型。
技术实现思路
1、为解决上述技术问题,本实用新型采用技术方案的基本构思是:
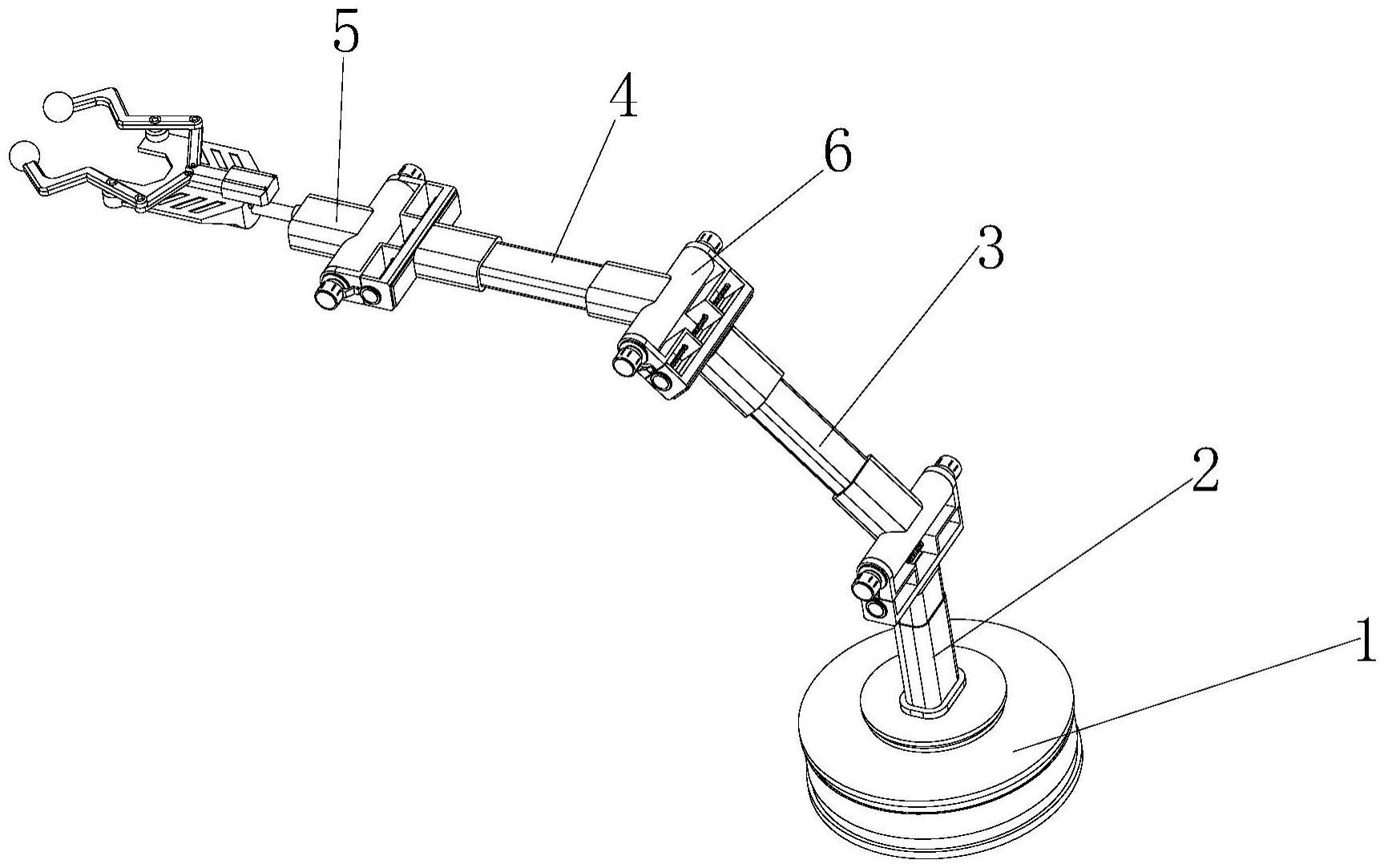
2、一种多轴联动便于改装零部件的多轴机械手,包括一号电机,所述一号电机的输出端装有立柱,所述立柱的上表面依次设置有一号驱动臂、二号驱动臂和三号驱动臂,所述一号驱动臂、二号驱动臂和三号驱动臂的后端均装有驱动轴,所述一号驱动臂、二号驱动臂的前端装有连接驱动机构,所述连接驱动机构包括外框架,所述外框架的内壁两侧均设置有活动架,所述活动架的后端装有限位块,所述外框架的内侧转动连接有双向螺杆,所述活动架的侧表面装有二号电机,所述二号电机的输出端装有驱动块。
3、作为本实用新型的进一步方案:所述外框架的内侧开设有限位槽,所述限位槽与限位块的形状均为t形,所述限位块滑动连接在限位槽的内侧。
4、作为本实用新型的进一步方案:所述双向螺杆的两端均贯穿至外框架的外表面,所述双向螺杆的两端均装有把柄。
5、作为本实用新型的进一步方案:所述活动架的侧表面贯穿开设有螺纹孔,所述活动架之间呈对称分布,所述双向螺杆与螺孔的内壁相啮合。
6、作为本实用新型的进一步方案:所述活动架套设在驱动轴的外表面,所述驱动轴的两端均开设有驱动槽,所述驱动槽套设在驱动块的外表面。
7、作为本实用新型的进一步方案:所述三号驱动臂的一端装有支座,所述支座的上表面装有电动伸缩杆,所述电动伸缩杆的输出端两侧均转动连接有转动轴,所述转动轴的一端转动连接有折角架。
8、作为本实用新型的进一步方案:所述支座的前端两侧均装有轴承,所述轴承与折角架转动连接,所述折角架的一端装有软质压球。
9、有益效果:
10、1.通过一号电机的运作对立柱的方向进行调节,一号驱动臂、二号驱动臂、三号驱动臂也随之调节,通过二号电机的运作带动驱动块旋转,达成对于驱动轴的角度调节功能,对操作位置进行灵活调整,在需要进行零件拆卸更换时,转动把柄带动双向螺杆旋转,配合活动架所开设螺孔,对活动架进行驱动,并通过限位块在限位槽内侧的滑动,对折角架的移动轨迹进行限定,达成对于两组折角架的间距调节功能,使得驱动轴脱离活动架,即可进行其他零件的装配使用工作。
11、2.通过电动伸缩杆的伸缩,带动两组转动轴进行位置调节,即可拉动折角架沿轴承进行旋转,对两组折角架的角度进行相对或相反方向调节,配合软质压球达成对于物件的抓取功能,该种方式抓取灵活,并且能够通过软质压球,避免抓取过程中对于货物造成损坏的情况、提升抓取工作的稳定性。
12、下面结合附图对本实用新型的具体实施方式做进一步详细的描述。
技术特征:
1.一种多轴联动便于改装零部件的多轴机械手,包括一号电机(1),其特征在于,所述一号电机(1)的输出端装有立柱(2),所述立柱(2)的上表面依次设置有一号驱动臂(3)、二号驱动臂(4)和三号驱动臂(5),所述一号驱动臂(3)、二号驱动臂(4)和三号驱动臂(5)的后端均装有驱动轴(6),所述一号驱动臂(3)、二号驱动臂(4)的前端装有连接驱动机构,所述连接驱动机构包括外框架(7),所述外框架(7)的内壁两侧均设置有活动架(8),所述活动架(8)的后端装有限位块(9),所述外框架(7)的内侧转动连接有双向螺杆(10),所述活动架(8)的侧表面装有二号电机(11),所述二号电机(11)的输出端装有驱动块(12)。
2.根据权利要求1所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述外框架(7)的内侧开设有限位槽,所述限位槽与限位块(9)的形状均为t形,所述限位块(9)滑动连接在限位槽的内侧。
3.根据权利要求1所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述双向螺杆(10)的两端均贯穿至外框架(7)的外表面,所述双向螺杆(10)的两端均装有把柄。
4.根据权利要求1所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述活动架(8)的侧表面贯穿开设有螺纹孔,所述活动架(8)之间呈对称分布,所述双向螺杆(10)与螺孔的内壁相啮合。
5.根据权利要求1所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述活动架(8)套设在驱动轴(6)的外表面,所述驱动轴(6)的两端均开设有驱动槽,所述驱动槽套设在驱动块(12)的外表面。
6.根据权利要求1所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述三号驱动臂(5)的一端装有支座(13),所述支座(13)的上表面装有电动伸缩杆(14),所述电动伸缩杆(14)的输出端两侧均转动连接有转动轴(15),所述转动轴(15)的一端转动连接有折角架(16)。
7.根据权利要求6所述的一种多轴联动便于改装零部件的多轴机械手,其特征在于,所述支座(13)的前端两侧均装有轴承(17),所述轴承(17)与折角架(16)转动连接,所述折角架(16)的一端装有软质压球(18)。
技术总结
本技术公开了一种多轴联动便于改装零部件的多轴机械手,属于机械手技术领域,其包括一号电机,一号电机的输出端装有立柱,立柱的上表面依次设置有一号驱动臂、二号驱动臂和三号驱动臂,一号驱动臂、二号驱动臂和三号驱动臂的后端均装有驱动轴,一号驱动臂、二号驱动臂的前端装有连接驱动机构,连接驱动机构包括外框架,外框架的内壁两侧均设置有活动架,活动架的后端装有限位块,通过转动把柄带动双向螺杆旋转,配合活动架所开设螺孔,对活动架进行驱动,并通过限位块在限位槽内侧的滑动,对折角架的移动轨迹进行限定,达成对于两组折角架的间距调节功能,使得驱动轴脱离活动架,即可进行其他零件的装配使用工作。
技术研发人员:赵松,王锦旭,赖嘉瑶,廖裕霓,魏臣,陈慧莹,方王镛,曾琪贤,陈志茹,叶颖思
受保护的技术使用者:韩山师范学院
技术研发日:20230425
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!