一种手指柔性外骨骼装置
本技术属于外骨骼助力领域,尤其涉及一种手指柔性外骨骼装置。
背景技术:
1、随着技术的发展,科技与机械的力量辅助人们完成一些事情,手指柔性外骨骼装置是让人穿上的助力装置,可以增强手指力量。可适用于应急救援领域、手指康复领域、手指关节助力等领域。
2、市场上现有的手指柔性外骨骼装置产品,结构复杂,助力原理复杂,因而成本更高价格更昂贵,如专利号202210238583.6公开了“半包裹型手指夹具及手指康复外骨骼机器人”中的驱动机构包括多个输出端,所述输出端分别与所述驱动机构分别与所述串联弹性驱动器,所述掌指关节传动机构相连接,使得该装置驱动方式复杂的同时也提高了其生产成本。又如专利号cn114536379a公开了一种外骨骼,包括手掌部、多个手指部及多个施压机构。每个施压机构和至少一个手指部连接,适用于向手指部施加一个与弯曲动作相同方向的压力,以使得手指和/或手指部在与物体发生接触的状态下,手指部对手指提供保持弯曲的支持力,或向物体施加一个大于手指施加的第一握力的第二握力。该装置虽然也可以很好的完成抓握动作,帮助增强力量,但是该装置的整体结构比较复杂。
技术实现思路
1、鉴于上述问题,本实用新型的目的在于提供一种手指柔性外骨骼装置,旨在解决现有手指柔性外骨骼装置结构复杂并且制作成本较高的问题。
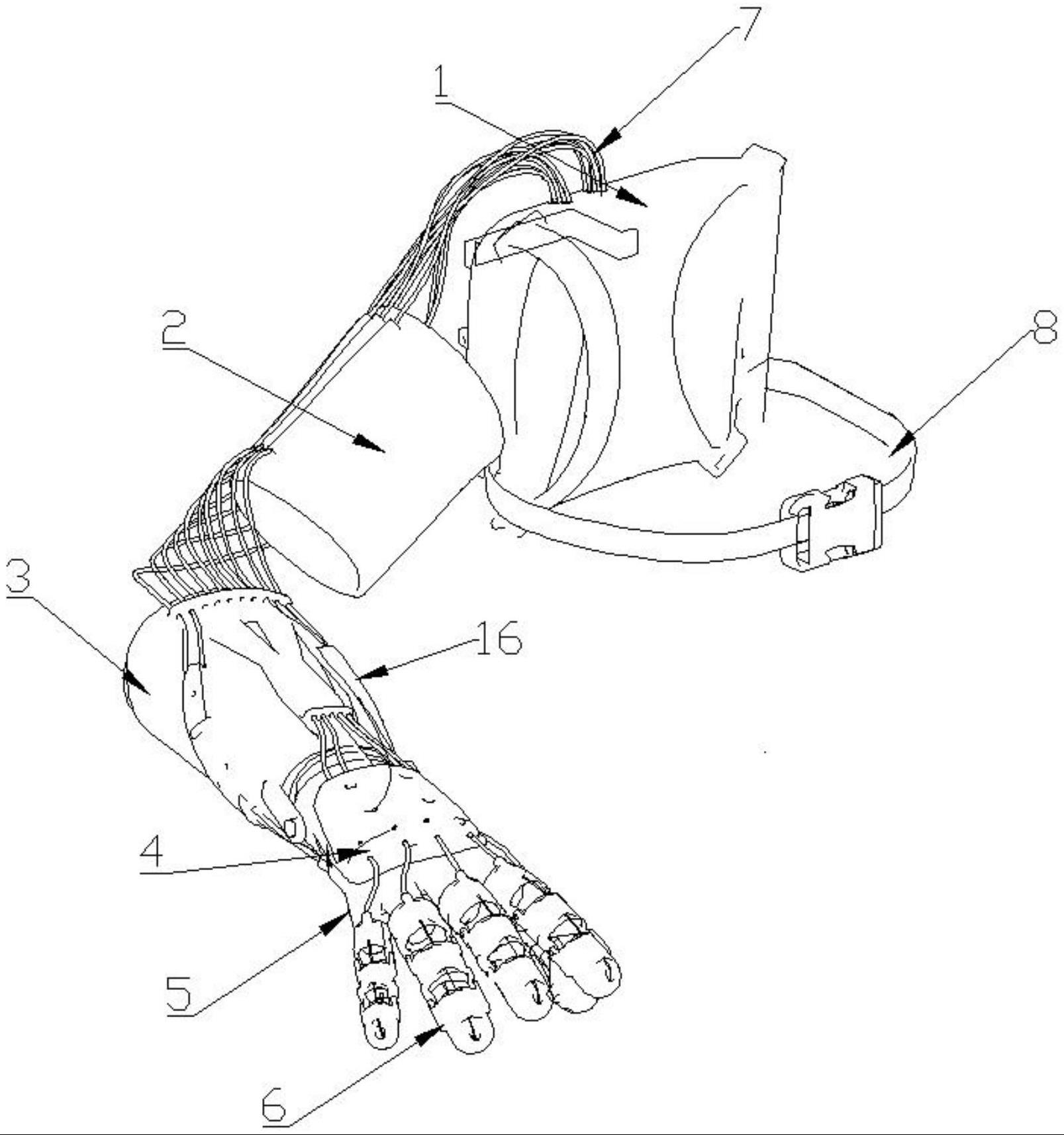
2、本实用新型采用如下技术方案:所述外骨骼装置包括依次连接的驱动盒、上臂软包、小臂衬套、所述小臂衬套末端转动连接有手掌衬套,所述手掌衬套末端通过支撑板转动设有多根指套,所述驱动盒内引出有两组驱动钢丝组,所述两组驱动钢丝组的驱动钢丝依次穿过上臂软包、小臂衬套、手掌衬套,其中两组驱动钢丝组中的驱动钢丝分别对应从每根指套顶部和指套底部穿过后固定在指套末端。
3、进一步的,所述驱动盒包括盒体,所述盒体内设有至少设置一个导向架,所述导向架上下位置转动设有一组导向轮,所述盒体内且位于导向架前侧转动设有上下放置的两个线辊,其中两组驱动钢丝组分别绕过导向轮后缠绕且固定在对应的线辊上,所述盒体还设有用于驱动线辊转动的舵机。
4、进一步的,两个线辊上的驱动钢丝组的缠绕方向相反。
5、进一步的,所述线辊末端设有从动齿轮,所述舵机驱动轴末端连接有主动齿轮,所述主动齿轮与两个从动齿轮啮合安装。
6、进一步的,所述线辊和导向轮上对应开有多个线槽,所述驱动钢丝组中的驱动钢丝位于所对应的线槽中。
7、进一步的,所述指套包括多个指环,其中相邻指环依次转动连接。
8、进一步的,所述驱动盒内侧设有腰部绑带。
9、本实用新型的有益效果是:本装置在使用时,通过腰部绑带将驱动盒固定在背部,之后手臂对应部位依次穿过上臂软包、小臂衬套、手掌衬套后手指对应放置在指套中。当启动本装置时,驱动盒驱动两组驱动钢丝组,其中一组驱动钢丝组进行收线动作,另一组驱动钢丝组进行放线动作,进而实现了所有的指套完成抓握动作,帮助增强力量。
技术特征:
1.一种手指柔性外骨骼装置,其特征在于:所述外骨骼装置包括依次连接的驱动盒、上臂软包、小臂衬套、所述小臂衬套末端转动连接有手掌衬套,所述手掌衬套末端通过支撑板转动设有多根指套,所述驱动盒内引出有两组驱动钢丝组,所述两组驱动钢丝组的驱动钢丝依次穿过上臂软包、小臂衬套、手掌衬套,其中两组驱动钢丝组中的驱动钢丝分别对应从每根指套顶部和指套底部穿过后固定在指套末端。
2.如权利要求1所述一种手指柔性外骨骼装置,其特征在于:所述驱动盒包括盒体,所述盒体内设有至少设置一个导向架,所述导向架上下位置转动设有一组导向轮,所述盒体内且位于导向架前侧转动设有上下放置的两个线辊,其中两组驱动钢丝组分别绕过导向轮后缠绕且固定在对应的线辊上,所述盒体还设有用于驱动线辊转动的舵机。
3.如权利要求2所述一种手指柔性外骨骼装置,其特征在于:两个线辊上的驱动钢丝组的缠绕方向相反。
4.如权利要求3所述一种手指柔性外骨骼装置,其特征在于:所述线辊末端设有从动齿轮,所述舵机驱动轴末端连接有主动齿轮,所述主动齿轮与两个从动齿轮啮合安装。
5.如权利要求4所述一种手指柔性外骨骼装置,其特征在于:所述线辊和导向轮上对应开有多个线槽,所述驱动钢丝组中的驱动钢丝位于所对应的线槽中。
6.如权利要求5所述一种手指柔性外骨骼装置,其特征在于:所述指套包括多个指环,其中相邻指环依次转动连接。
7.如权利要求6所述一种手指柔性外骨骼装置,其特征在于:所述驱动盒内侧设有腰部绑带。
技术总结
本技术属于外骨骼助力领域,提供了一种手指柔性外骨骼装置,所述外骨骼装置包括依次连接的驱动盒、上臂软包、小臂衬套、所述小臂衬套末端转动连接有手掌衬套,所述手掌衬套末端通过支撑板转动设有多根指套,所述驱动盒内引出有两组驱动钢丝组,所述两组驱动钢丝组的驱动钢丝依次穿过上臂软包、小臂衬套、手掌衬套,其中两组驱动钢丝组中的驱动钢丝分别对应从每根指套顶部和指套底部穿过后固定在指套末端。本技术的目的在于提供一种手指柔性外骨骼装置,旨在解决现有手指柔性外骨骼装置结构复杂并且制作成本较高的问题。
技术研发人员:田云龙,周亚芳,杜嘉州,郑小锋,李世琦,刘进,王慧宇,王伟辉
受保护的技术使用者:武汉软件工程职业学院(武汉开放大学)
技术研发日:20230427
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!