电石炉智能巡检机器人的制作方法
本技术涉及电石生产巡检,是一种电石炉智能巡检机器人。
背景技术:
1、目前,电石生产过程中,需要依靠人工到现场进行巡检,从而导致工作人员劳动强度较大,且人工巡检时容易受到个人经验、主观意识的影响,亦会受到监测手段、数据记录、数据分析方面的制约,通常花费大量人力、物力不能得到有效的工艺数据结果,且得到的数据存在偏差、难以形成系统性,参考意义不大;另一方面,电石炉现场环境恶劣,常常出现现场高温、有毒有害气体等,工作人员长期在厂区内工作存在一定的安全隐患。
技术实现思路
1、本实用新型提供了一种电石炉智能巡检机器人,克服了上述现有技术之不足,其能有效解决现有电石炉巡检需要人工进行的问题。
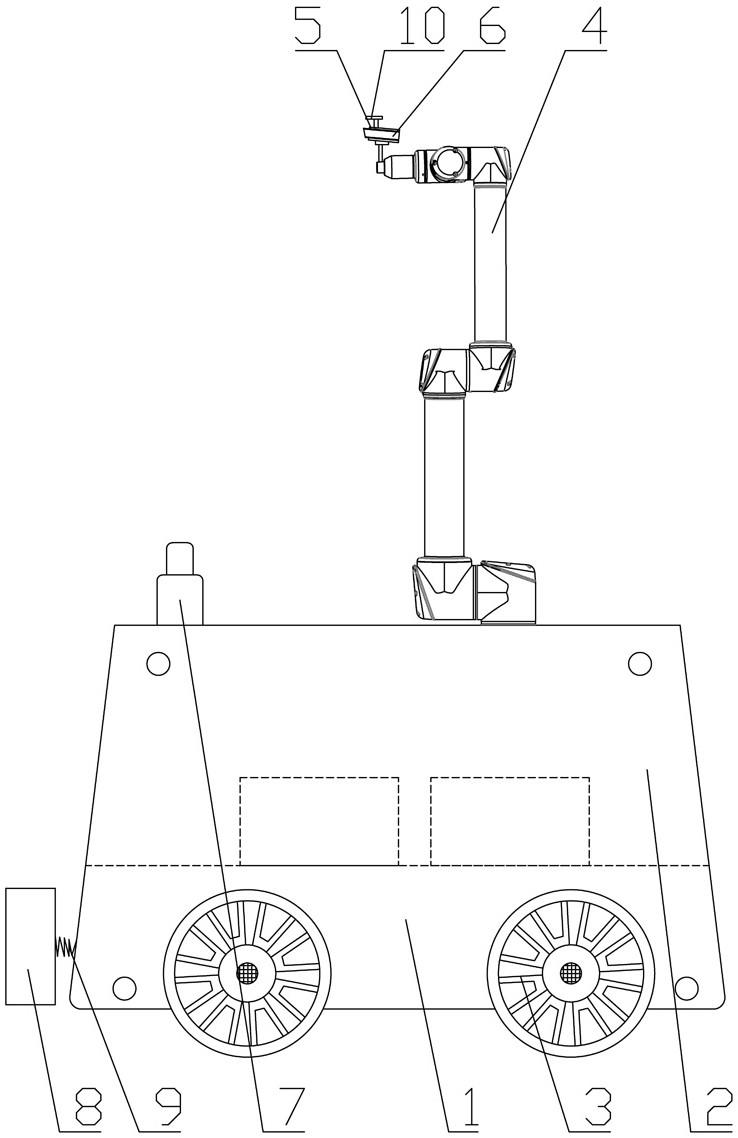
2、本实用新型的技术方案是通过以下措施来实现的:一种电石炉智能巡检机器人包括车架、控制平台、行走部、机械臂、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和gps模块,车架下侧设有行走部,车架上侧设有控制平台,控制平台上侧右部设有机械臂,机械臂的末端关节上设有红外热像仪和图像捕捉模块,控制平台上侧左部设有巡检感知模块,控制平台左侧设有机械视觉避障模块,控制平台内设有控制模块和gps模块,机械臂、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和gps模块均与控制模块连接,控制模块与行走部连接。
3、下面是对上述实用新型技术方案的进一步优化或/和改进:
4、上述巡检感知模块可包括一氧化碳传感器、温度传感器、湿度传感器和声音录入装置,一氧化碳传感器、温度传感器、湿度传感器和声音录入装置均与控制模块连接。
5、上述还可包括存储模块、无线通信模块、远程控制终端,存储模块与控制模块连接,控制模块与无线通信模块连接,无线通信模块与远程控制终端连接。
6、上述机械臂可为六轴机械臂。
7、上述还可包括防撞梁和减震弹簧,控制平台左方设有防撞梁,控制平台与防撞梁之间由前至后间隔设有若干减震弹簧。
8、上述还可包括补光灯,机械臂的末端关节上设有补光灯。
9、本实用新型结构合理而紧凑,使用方便,通过设置控制模块、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和gps模块,实现电石炉智能巡检;通过红外热像仪,实现红外视频采集;通过设置图像捕捉模块,实现可见光视频采集以及电石炉仪表拍摄度数;通过设置机械视觉避障模块和gps模块,实现对巡检现场的巡检路线规划及避障;通过设置巡检感知模块,实现对巡检现场的温度及有毒有害气体进行监测,具有可靠、高效和稳定的特点。
技术特征:
1.一种电石炉智能巡检机器人,其特征在于包括车架、控制平台、行走部、机械臂、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和gps模块,车架下侧设有行走部,车架上侧设有控制平台,控制平台上侧右部设有机械臂,机械臂的末端关节上设有红外热像仪和图像捕捉模块,控制平台上侧左部设有巡检感知模块,控制平台左侧设有机械视觉避障模块,控制平台内设有控制模块和gps模块,机械臂、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和gps模块均与控制模块连接,控制模块与行走部连接。
2.根据权利要求1所述的电石炉智能巡检机器人,其特征在于巡检感知模块包括一氧化碳传感器、温度传感器、湿度传感器和声音录入装置,一氧化碳传感器、温度传感器、湿度传感器和声音录入装置均与控制模块连接。
3.根据权利要求1或2所述的电石炉智能巡检机器人,其特征在于还包括存储模块、无线通信模块、远程控制终端,存储模块与控制模块连接,控制模块与无线通信模块连接,无线通信模块与远程控制终端连接。
4.根据权利要求1或2所述的电石炉智能巡检机器人,其特征在于机械臂为六轴机械臂。
5.根据权利要求3所述的电石炉智能巡检机器人,其特征在于机械臂为六轴机械臂。
6.根据权利要求1或2或5所述的电石炉智能巡检机器人,其特征在于还包括防撞梁和减震弹簧,控制平台左方设有防撞梁,控制平台与防撞梁之间由前至后间隔设有若干减震弹簧。
7.根据权利要求3所述的电石炉智能巡检机器人,其特征在于还包括防撞梁和减震弹簧,控制平台左方设有防撞梁,控制平台与防撞梁之间由前至后间隔设有若干减震弹簧。
8.根据权利要求4所述的电石炉智能巡检机器人,其特征在于还包括防撞梁和减震弹簧,控制平台左方设有防撞梁,控制平台与防撞梁之间由前至后间隔设有若干减震弹簧。
9.根据权利要求1或2或5或7或8所述的电石炉智能巡检机器人,其特征在于还包括补光灯, 机械臂的末端关节上设有补光灯。
10.根据权利要求6所述的电石炉智能巡检机器人,其特征在于还包括补光灯, 机械臂的末端关节上设有补光灯。
技术总结
本技术涉及电石生产巡检技术领域,是一种电石炉智能巡检机器人,其包括车架、控制平台、行走部、机械臂、红外热像仪、图像捕捉模块、巡检感知模块、机械视觉避障模块和GPS模块,车架下侧设有行走部,车架上侧设有控制平台,控制平台上侧右部设有机械臂,机械臂的末端关节上设有红外热像仪和图像捕捉模块。本技术结构合理而紧凑,使用方便,通过红外热像仪,实现红外视频采集;通过设置图像捕捉模块,实现可见光视频采集以及电石炉仪表拍摄度数;通过设置机械视觉避障模块和GPS模块,实现对巡检现场的巡检路线规划及避障;通过设置巡检感知模块,实现对巡检现场的温度及有毒有害气体进行监测,具有可靠、高效和稳定的特点。
技术研发人员:王志国,陈勇江,赵江龙,任建新,唐聪,吴生启,方涛,马万龙,焦鹏飞
受保护的技术使用者:新疆圣雄电石有限公司
技术研发日:20230504
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!