一种具有防滑机械爪结构的机械手臂的制作方法
本技术涉及机械手臂,具体为一种具有防滑机械爪结构的机械手臂。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手臂在制造业中使用较为广泛,大多用机械手柄抓取零件,现有机械手臂的爪手在抓取零件的时候与零件之间的接触面积较小,在抓取的时候零件很容易出现滑动的情况,稳定性差,防滑效果差,因此,需要一种具有防滑机械爪结构的机械手臂。
技术实现思路
1、本实用新型的目的在于提供一种具有防滑机械爪结构的机械手臂,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种具有防滑机械爪结构的机械手臂,包括机械大臂,机械大臂一端铰接设有机械小臂,机械小臂一端铰接设有安装板,所述安装板外壁开设有四组开口,四组开口内均铰接设有夹持爪板,安装板底部铰接设有四组液压杆,四组液压杆一端分别与四组夹持爪板内侧壁相铰接,所述夹持爪板内侧壁均设有固定板,固定板内开设有空腔,空腔内设有稳定机构。
3、进一步的,所述稳定机构包括空腔内设有的分隔板,两组分隔板上下侧壁均设有电动伸缩杆,空腔内滑动连接设有两组滑块,两组电动伸缩杆一端分别与两组滑块相对侧壁相连接,两组滑块右侧壁均铰接设有连杆,固定板右侧设有稳定板,两组连杆一端均与稳定板左侧壁相铰接。
4、进一步的,空腔内左侧壁均开设有两组导向槽,两组滑块左侧壁均设有与导向槽相匹配的导向块。
5、进一步的,所述稳定板右侧壁设有第二防滑层。
6、进一步的,四组夹持爪板相对侧壁均设有第一防滑层。
7、进一步的,四组开口在安装板顶部呈矩形阵列分布。
8、与现有技术相比,本实用新型的有益效果是:本实用在稳定机构的作用下能够在抓取零件的时候对零件进行挤压,同时提高与零件之间的接触面积,同时在第一防滑层和第二防滑层的配合下能够提高夹持爪板与零件之间的防滑性,防滑效果好,提高机械手臂对零件抓取的稳定性。
技术特征:
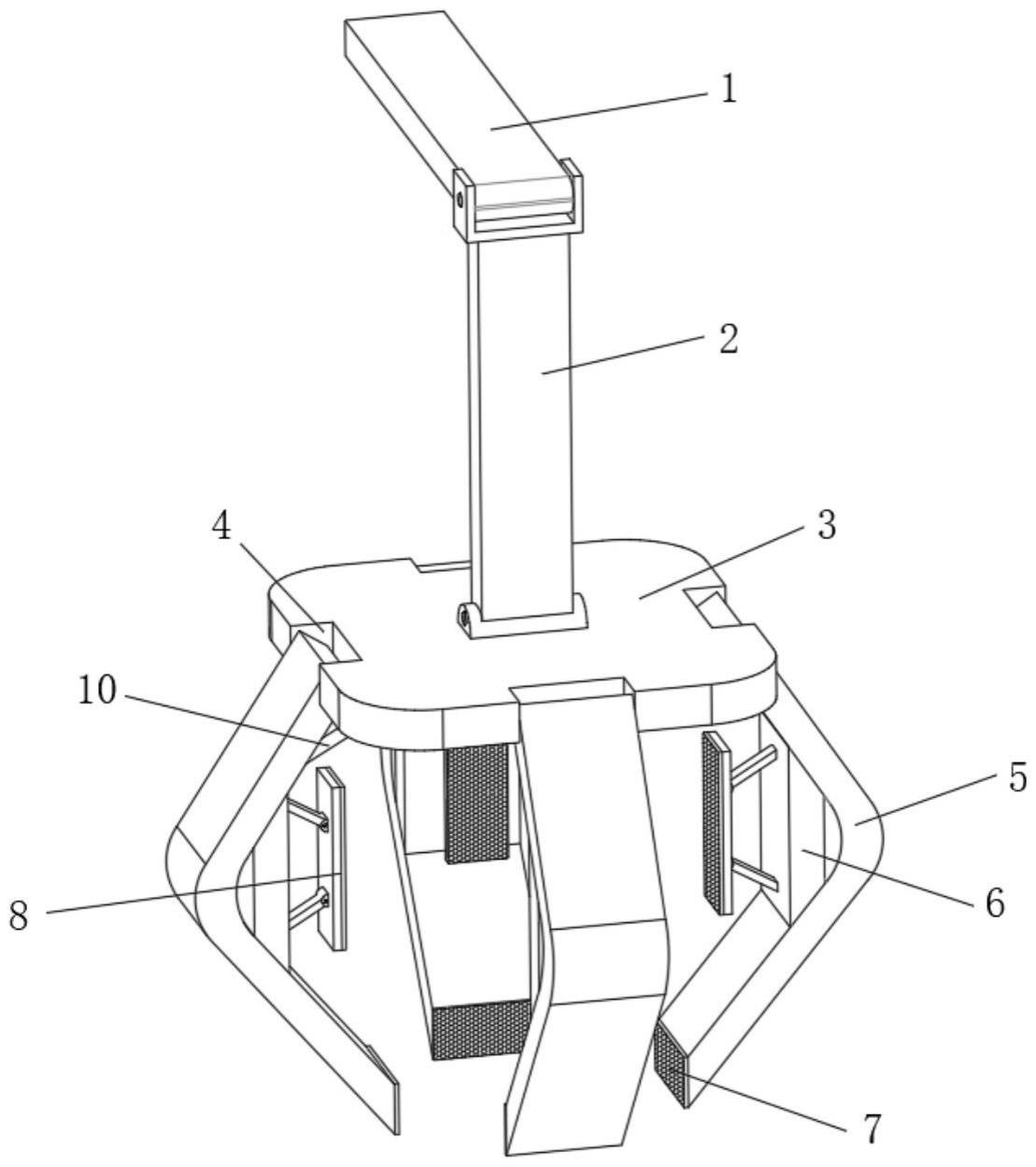
1.一种具有防滑机械爪结构的机械手臂,包括机械大臂(1),机械大臂(1)一端铰接设有机械小臂(2),机械小臂(2)一端铰接设有安装板(3),其特征在于:所述安装板(3)外壁开设有四组开口(4),四组开口(4)内均铰接设有夹持爪板(5),安装板(3)底部铰接设有四组液压杆(10),四组液压杆(10)一端分别与四组夹持爪板(5)内侧壁相铰接,所述夹持爪板(5)内侧壁均设有固定板(6),固定板(6)内开设有空腔(9),空腔(9)内设有稳定机构(8)。
2.根据权利要求1所述的一种具有防滑机械爪结构的机械手臂,其特征在于:所述稳定机构(8)包括空腔(9)内设有的分隔板(80),两组分隔板(80)上下侧壁均设有电动伸缩杆(81),空腔(9)内滑动连接设有两组滑块(82),两组电动伸缩杆(81)一端分别与两组滑块(82)相对侧壁相连接,两组滑块(82)右侧壁均铰接设有连杆(83),固定板(6)右侧设有稳定板(84),两组连杆(83)一端均与稳定板(84)左侧壁相铰接。
3.根据权利要求2所述的一种具有防滑机械爪结构的机械手臂,其特征在于:空腔(9)内左侧壁均开设有两组导向槽,两组滑块(82)左侧壁均设有与导向槽相匹配的导向块。
4.根据权利要求2所述的一种具有防滑机械爪结构的机械手臂,其特征在于:所述稳定板(84)右侧壁设有第二防滑层(85)。
5.根据权利要求1所述的一种具有防滑机械爪结构的机械手臂,其特征在于:四组夹持爪板(5)相对侧壁均设有第一防滑层(7)。
6.根据权利要求1所述的一种具有防滑机械爪结构的机械手臂,其特征在于:四组开口(4)在安装板(3)顶部呈矩形阵列分布。
技术总结
本技术公开了机械手臂技术领域的一种具有防滑机械爪结构的机械手臂,包括机械大臂,机械大臂一端铰接设有机械小臂,机械小臂一端铰接设有安装板,安装板外壁开设有四组开口,四组开口内均铰接设有夹持爪板,安装板底部铰接设有四组液压杆,四组液压杆一端分别与四组夹持爪板内侧壁相铰接,夹持爪板内侧壁均设有固定板,固定板内开设有空腔,空腔内设有稳定机构,本实用在稳定机构的作用下能够在抓取零件的时候对零件进行挤压,同时提高与零件之间的接触面积,同时在第一防滑层和第二防滑层的配合下能够提高夹持爪板与零件之间的防滑性,防滑效果好,提高机械手臂对零件抓取的稳定性。
技术研发人员:崔成龙
受保护的技术使用者:上海正菏智能设备制造股份有限公司
技术研发日:20230504
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!