一种机器人的零件抓取机构的制作方法
本技术涉及智能机器人生产的,具体为一种机器人的零件抓取机构。
背景技术:
1、机器人的零件抓取机构主要是作用在智能机器人生产加工场所中对于机器人上端的使用配件进行抓取使用的设备装置,随着现代化科技的发展,对于机器人生产领域使用的工具种类逐渐增多,而其上端的功能也逐渐完善,使其可以更好的满足使用的需求。
2、针对于此,中国专利号cn109865967a提出了一种机械零件焊接用抓取机器人,机械爪在抓取机械零件时,对机械零件的抓取力度很大,机械零件不容易脱落;而较小的机械零件一旦不慎脱落后会掉落在机械爪底部的接取框内部,避免掉落至地面而丢失,但是现有的机器人生产车间中,对于机器人上端使用的配件种类较多,人工抓取在递给加工区域的机器进行装配则需要花费工作人员大量的体力以及精力,且容易造成失误,导致加工中断,从而降低机器人的生产效率。
技术实现思路
1、为了解决上述问题,本实用新型的目的是提供一种机器人的零件抓取机构,以解决上述背景技术中提出的问题。
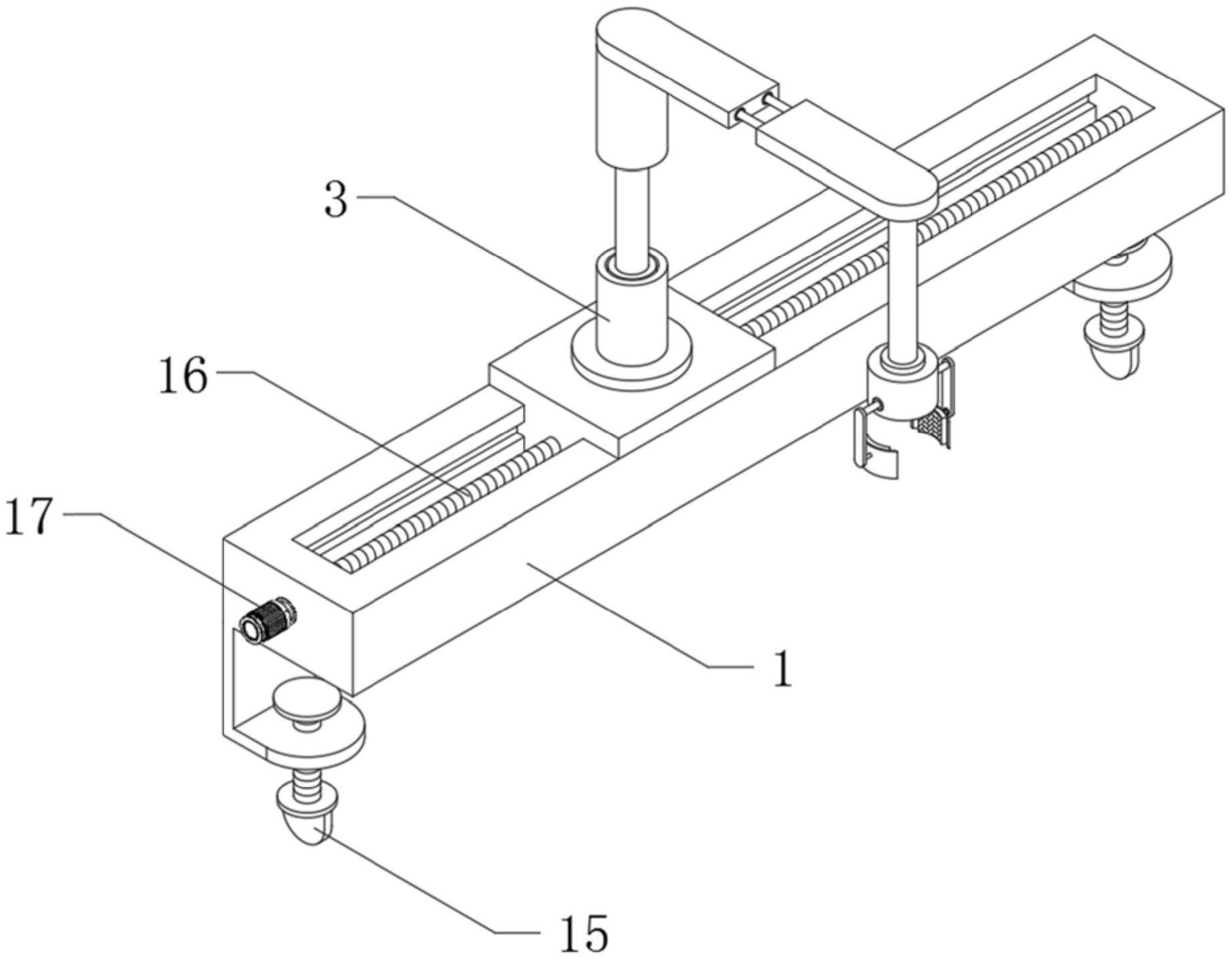
2、为实现上述目的,本实用新型提出了一种机器人的零件抓取机构,包括支撑底座,所述支撑底座上端设置有可自动升降移动的抓取连接结构,所述抓取连接结构上端设置有液压杆以及夹板,主要用作于机器人零件的抓取,所述可自动升降移动的抓取连接机构包括卡合设置在支撑底座上端的移动底座,所述移动底座的顶端固定设有套筒,所述套筒的内壁卡合设有第一电动伸缩杆,所述第一电动伸缩杆的输出端固定设有支撑架,所述支撑架一侧的两端均卡合设有第二电动伸缩杆;
3、两个所述第二电动伸缩杆的输出端设置有延长板,所述延长板的底部固定设有连接架。
4、在一个示例中,两个所述液压杆一端的外壁分别与连接架两侧的内壁卡合连接,两个所述夹板的内壁均固定设有橡胶垫。
5、在一个示例中,所述支撑底座顶端的中间位置开设有滑槽,所述滑槽内壁的两侧均开设有限位槽,且移动底座的外壁与滑槽的内壁滑动连接,移动底座两端的外壁分别与两个限位槽的内壁卡合连接。
6、在一个示例中,所述支撑底座底部两端的边缘处均固定设有固定支架,两个所述固定支架底部的一侧均穿插设有螺杆,且两个螺杆的外壁分别与两个固定支架一侧的内壁螺纹连接。
7、在一个示例中,所述移动底座外壁的一边侧开设有螺孔,所述滑槽的内壁转动设有丝杆,且丝杆的外壁与螺孔的内壁螺纹连接,所述支撑底座外壁的一边侧固定设有电机,且丝杆的一端与电机的输出端固定连接。
8、在一个示例中,所述支撑底座外壁的一侧固定设有开关面板,所述开关面板的一侧分别开设有第一电动伸缩杆开关、第二电动伸缩杆开关以及电机开关,且第一电动伸缩杆通过第一电动伸缩杆开关、第二电动伸缩杆通过第二电动伸缩杆开关以及电机通过电机开关均与外接电源电性连接。
9、通过本实用新型提出的一种机器人的零件抓取机构能够带来如下有益效果:
10、1、该一种机器人的零件抓取机构,通过设置有由移动底座、套筒、第一电动伸缩杆、支撑架、第二电动伸缩杆、延长板、连接架、液压杆、夹板以及橡胶垫等组成的可自动升降移动的抓取结构,使用时,丝杆在滑槽中转动连接并与移动底座上端的螺孔螺纹连接,启动电机使得移动底座在丝杆的驱动下在滑槽中来回移动,启动第一电动伸缩杆使得连接抓取结构的支撑架升降,并启动第二电动伸缩杆可以调节抓取结构的抓取距离,然后再启动连接架两侧的液压杆使得夹板夹紧,其中的橡胶垫夹持零件,将其抓取出来即可,橡胶垫不会磨损零件,不需要工作人员手动抓取传递,降低工作人员的工作负担,且不易造成抓取失误,从而提高机器人的生产效率。
11、2、该一种机器人的零件抓取机构,通过设置有由支撑底座、固定支架以及螺杆等组成的方便安装的支撑结构,使用时,通过支撑底座安装该抓取机构,将支撑底座通过固定支架卡合在生产机器的一侧,拧动螺杆即可将其卡紧在机器的一侧,使其抓取起来更加稳定,从而提高装置工作的稳定性。
技术特征:
1.一种机器人的零件抓取机构,包括:
2.根据权利要求1所述的一种机器人的零件抓取机构,其特征在于:两个所述液压杆(9)一端的外壁分别与连接架(8)两侧的内壁卡合连接,两个所述夹板(10)的内壁均固定设有橡胶垫(11)。
3.根据权利要求1所述的一种机器人的零件抓取机构,其特征在于:所述支撑底座(1)顶端的中间位置开设有滑槽(12),所述滑槽(12)内壁的两侧均开设有限位槽(13),且移动底座(2)的外壁与滑槽(12)的内壁滑动连接,移动底座(2)两端的外壁分别与两个限位槽(13)的内壁卡合连接。
4.根据权利要求1所述的一种机器人的零件抓取机构,其特征在于:所述支撑底座(1)底部两端的边缘处均固定设有固定支架(14),两个所述固定支架(14)底部的一侧均穿插设有螺杆(15),且两个螺杆(15)的外壁分别与两个固定支架(14)一侧的内壁螺纹连接。
5.根据权利要求3所述的一种机器人的零件抓取机构,其特征在于:所述移动底座(2)外壁的一边侧开设有螺孔,所述滑槽(12)的内壁转动设有丝杆(16),且丝杆(16)的外壁与螺孔的内壁螺纹连接,所述支撑底座(1)外壁的一边侧固定设有电机(17),且丝杆(16)的一端与电机(17)的输出端固定连接。
6.根据权利要求5所述的一种机器人的零件抓取机构,其特征在于:所述支撑底座(1)外壁的一侧固定设有开关面板,所述开关面板的一侧分别开设有第一电动伸缩杆开关、第二电动伸缩杆开关以及电机开关,且第一电动伸缩杆(4)通过第一电动伸缩杆开关、第二电动伸缩杆(6)通过第二电动伸缩杆开关以及电机(17)通过电机开关均与外接电源电性连接。
技术总结
本技术公开了一种机器人的零件抓取机构,包括支撑底座,可自动升降移动的抓取连接机构包括卡合设置在支撑底座上端的移动底座,移动底座的顶端固定设有套筒,套筒的内壁卡合设有第一电动伸缩杆,第一电动伸缩杆的输出端固定设有支撑架,支撑架一侧的两端均卡合设有第二电动伸缩杆。本技术,启动电机使得移动底座在丝杆的驱动下在滑槽中来回移动,启动第一电动伸缩杆使得连接抓取结构的支撑架升降,并启动第二电动伸缩杆可以调节抓取结构的抓取距离,然后再启动连接架两侧的液压杆使得夹板夹紧,其中的橡胶垫夹持零件,将其抓取出来即可,不需要工作人员手动抓取传递,从而提高机器人的生产效率。
技术研发人员:晁硕陽,吕启明,刘彪
受保护的技术使用者:道非科技(青岛)有限公司
技术研发日:20230505
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!