一种无极变距夹爪装置的制作方法
本技术涉及机械抓取装置领域,具体涉及一种无极变距夹爪装置。
背景技术:
1、目前,新能源电芯上料领域中,电芯通过机器人将电芯夹取放置在上料缓存滑台上,现有的机器人夹爪只能夹取一种规格的电芯,如若客户需要进行产品更换,只能将旧夹爪拆除,更换对应新电芯的夹爪,不仅需要时间进行重新设计生产,还造成成本的上升。
技术实现思路
1、基于此,本实用新型的目的在于提供一种无极变距夹爪装置,该装置无需更换夹爪便可兼容多种电芯产品的夹取,满足不同客户不同产品需求,节省成本及时间。
2、本实用新型解决上述技术问题的技术方案如下:本实用新型提供一种无极变距夹爪装置,该装置至少包括骨架和设置在骨架上的无极变距模块和夹爪模块;
3、所述无极变距模块至少包括变距板和动力组件,所述变距板可滑动的安装在骨架上且其上开设有多个条形导槽,相邻条形导槽之间的间距沿导槽方向逐渐变化;
4、夹爪模块至少包括多个夹爪组件,每个夹爪组件均独立可滑动的安装在骨架下方且滑动方向与变距板上导槽的方向不平行,夹爪组件至少包括凸轮随动器,所述凸轮随动器的一端位于变距板上的导槽中;
5、当变距板在动力组件的作用下滑动时,通过凸轮随动器带动夹爪组件互相靠近或者远离。
6、作为一种优选的实施方式,所述夹爪组件至少还包括滑板、夹爪气缸和夹块,所述夹爪气缸安装在滑板下表面,所述夹块有两个,分别固定在夹爪气缸的固定端和活动端;所述骨架上设置有两列滑轨,所述夹爪组件通过滑板可滑动的安装在滑轨上。
7、作为一种优选的实施方式,所述夹爪组件还包括滑块安装板和气缸安装板,所述滑块安装板垂直固定在滑板下表面,所述气缸安装板水平安装在滑块安装板的下方,夹爪气缸安装在滑块安装板的下方。
8、作为一种优选的实施方式,所述动力组件至少包括伺服电机和丝杆,所述变距板通过变距块安装在丝杆上,伺服电机控制丝杆转动,丝杆通过变距块带动变距板在骨架上滑动。
9、作为一种优选的实施方式,所述无极变距模块还包括多个传感器,所述多个传感器用于监测变距板是否移动到位。
10、作为一种优选的实施方式,该装置还包括防坠模块,所述防坠模块至少包括变距气缸、拉升气缸和防坠杆,所述变距气缸有两个对称安装在骨架的两端,所述拉升气缸有两对,分别安装在变距气缸的固定端和活动端,每对拉升气缸之间设置有防坠杆;变距气缸收缩,两个防坠杆之间的距离变近,拉升气缸收缩,此时至少一个防坠杆位于夹取电芯的正下方。
11、作为一种优选的实施方式,防坠模块还包括直线轴承,所述直线轴承用于拉升气缸拉升时的导向。
12、作为一种优选的实施方式,防坠模块还包括兜底接近开关,兜底接近开关用于监测防坠杆的位置。
13、作为一种优选的实施方式,该装置还包括相机模块,所述相机模块用于识别检测泡沫板上是否有电芯。
14、作为一种优选的实施方式,所述相机模块至少包括激光测距仪和相机,当激光测距仪反馈的高度为设定高度时,相机开始识别检测泡沫板上是否有电芯。
15、本实用新型所提供的无极变距夹爪装置,通过变距板即可实现夹爪之间的间距调整,无需更换夹爪便可兼容多种电芯产品的夹取,满足不同客户不同产品需求,节省成本及时间。
技术特征:
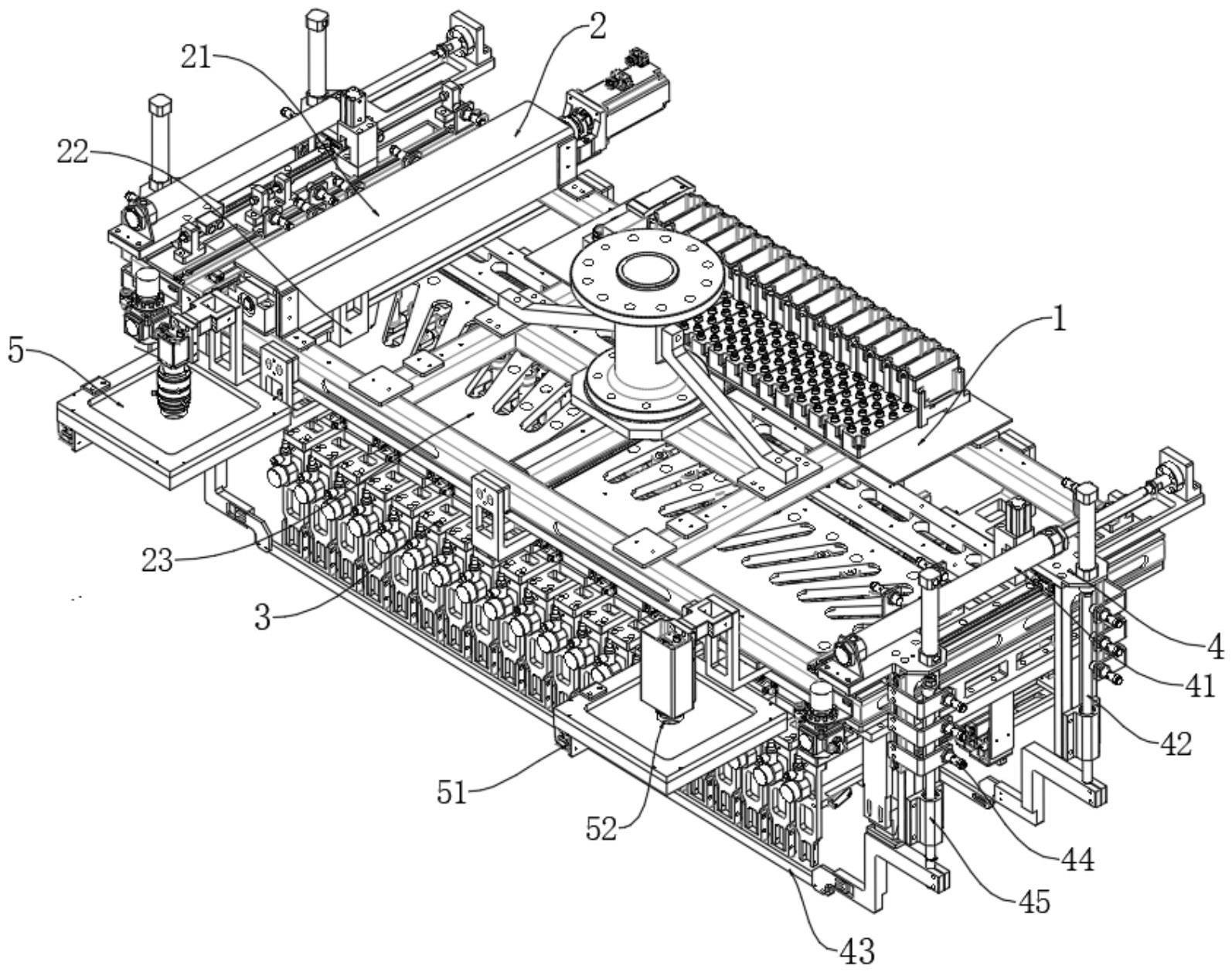
1.一种无极变距夹爪装置,其特征在于,至少包括骨架(1)和设置在骨架(1)上的无极变距模块(2)和夹爪模块(3);
2.根据权利要求1所述的无极变距夹爪装置,其特征在于,所述夹爪组件至少还包括滑板(32)、夹爪气缸(33)和夹块(34),所述夹爪气缸(33)安装在滑板(32)下表面,所述夹块(34)有两个,分别固定在夹爪气缸(33)的固定端和活动端;所述骨架(1)上设置有两列滑轨,所述夹爪组件通过滑板(32)可滑动的安装在滑轨上。
3.根据权利要求2所述的无极变距夹爪装置,其特征在于,所述夹爪组件还包括滑块安装板(35)和气缸安装板(36),所述滑块安装板(35)垂直固定在滑板(32)下表面,所述气缸安装板(36)水平安装在滑块安装板(35)的下方,夹爪气缸(33)安装在滑块安装板(35)的下方。
4.根据权利要求1所述的无极变距夹爪装置,其特征在于,所述动力组件(21)至少包括伺服电机和丝杆,所述变距板(23)通过变距块(22)安装在丝杆上,伺服电机控制丝杆转动,丝杆通过变距块(22)带动变距板(23)在骨架(1)上滑动。
5.根据权利要求1所述的无极变距夹爪装置,其特征在于,所述无极变距模块(2)还包括多个传感器,所述多个传感器用于监测变距板(23)是否移动到位。
6.根据权利要求1所述的无极变距夹爪装置,其特征在于,还包括防坠模块(4),所述防坠模块(4)至少包括变距气缸(41)、拉升气缸(42)和防坠杆(43),所述变距气缸(41)有两个对称安装在骨架(1)的两端,所述拉升气缸(42)有两对,分别安装在变距气缸(41)的固定端和活动端,每对拉升气缸(42)之间设置有防坠杆(43);
7.根据权利要求6所述的无极变距夹爪装置,其特征在于,防坠模块(4)还包括直线轴承(45),所述直线轴承(45)用于拉升气缸(42)拉升时的导向。
8.根据权利要求6所述的无极变距夹爪装置,其特征在于,防坠模块(4)还包括兜底接近开关(44),兜底接近开关(44)用于监测防坠杆(43)的位置。
9.根据权利要求1所述的无极变距夹爪装置,其特征在于,还包括相机模块(5),所述相机模块(5)用于识别检测泡沫板上是否有电芯。
10.根据权利要求9所述的无极变距夹爪装置,其特征在于,所述相机模块(5)至少包括激光测距仪(51)和相机(52),当激光测距仪(51)反馈的高度为设定高度时,相机(52)开始识别检测泡沫板上是否有电芯。
技术总结
本技术涉及机械抓取装置领域,具体涉及一种无极变距夹爪装置。该装置至少包括骨架和设置在骨架上的无极变距模块和夹爪模块;无极变距模块至少包括变距板和动力组件,变距板可滑动的安装在骨架上且其上开设有多个条形导槽,相邻条形导槽之间的间距沿导槽方向逐渐变化;夹爪模块至少包括多个夹爪组件,每个夹爪组件均独立可滑动的安装在骨架下方且滑动方向与变距板上导槽的方向不平行,夹爪组件至少包括凸轮随动器,所述凸轮随动器的一端位于变距板上的导槽中;当变距板在动力组件的作用下滑动时,通过凸轮随动器带动夹爪组件互相靠近或者远离。该装置无需更换夹爪便可兼容多种电芯产品的夹取,节省成本及时间。
技术研发人员:潘延庆
受保护的技术使用者:先惠自动化技术(武汉)有限责任公司
技术研发日:20230430
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!