深度感知模组、设备和系统的制作方法
本申请涉及视觉感知,特别是涉及一种深度感知模组、设备和系统。
背景技术:
1、随着机器视觉、自动驾驶等技术的发展,视觉感知技术被熟知,感知避障的技术也被广泛应用,如机器人通过使用深度相机进行感知避障。但现有技术中,存在深度相机的感知范围较小的不足。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够增大深度相机的感知范围的深度感知模组、设备和系统。
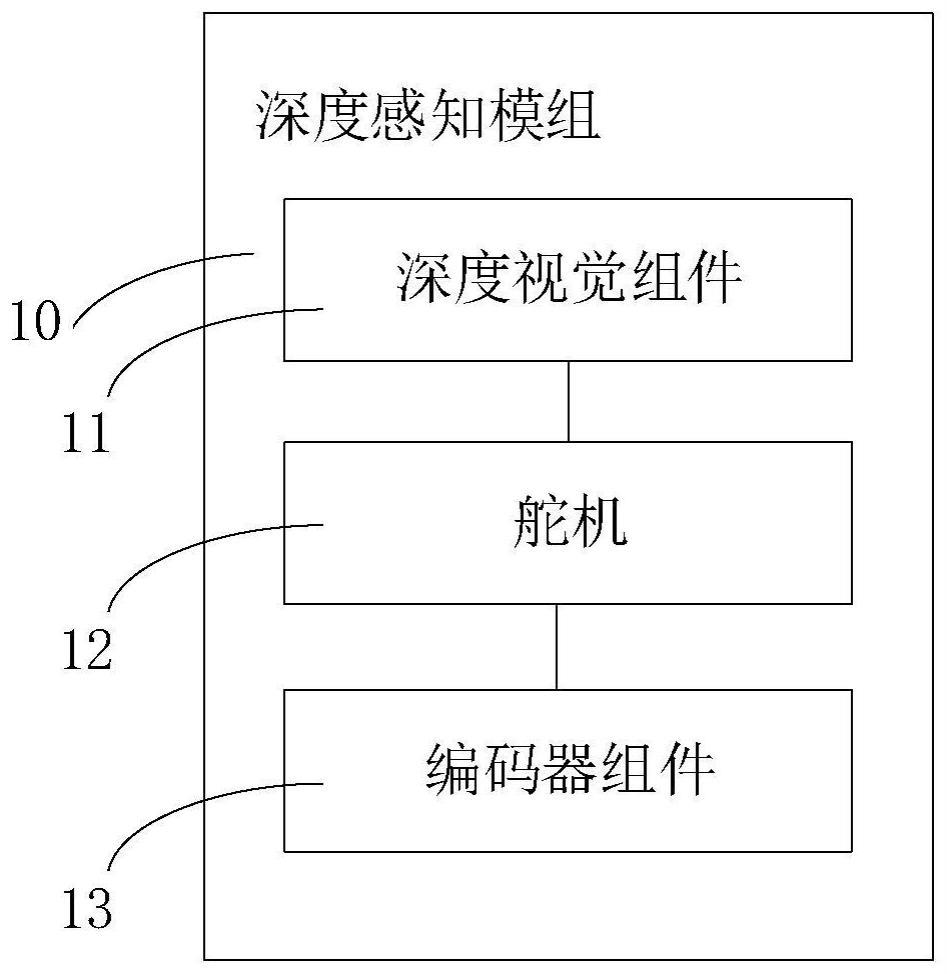
2、第一方面,本申请提供了一种深度感知模组,深度感知模组包括:
3、深度视觉组件;
4、舵机,与深度视觉组件连接,用于带动深度视觉组件同步旋转;
5、编码器组件,与舵机连接,用于测量舵机的旋转角度。
6、在其中一个实施例中,舵机带动深度视觉组件同步旋转的角度范围为0°~180°。
7、在其中一个实施例中,深度视觉组件的感知视场角为90°。
8、在其中一个实施例中,深度感知模组还包括:
9、联轴器,用于连接舵机和深度视觉组件。
10、在其中一个实施例中,深度视觉组件包括:
11、深度相机,用于拍摄环境图像并将图像数据上传至上位机;
12、相机支架,相机支架的一端与联轴器固定连接,另一端与深度相机固定连接。
13、在其中一个实施例中,编码器组件包括:
14、磁编码器,用于测量舵机的旋转角度;
15、磁铁,与联轴器固定连接;
16、编码器支架,编码器支架的一端与舵机固定连接,另一端与磁编码器固定连接。
17、在其中一个实施例中,舵机与舵机驱动器连接,舵机在舵机驱动器的驱动下旋转。
18、第二方面,本申请还提供了一种深度感知设备,深度感知设备包括:
19、如上述的深度感知模组;
20、下位机,分别与深度感知模组中的编码器组件、舵机驱动器连接;
21、舵机驱动器,分别与下位机和深度感知模组中的舵机连接。
22、第三方面,本申请还提供了一种深度感知系统,深度感知系统包括:
23、如上述的深度感知设备;
24、上位机,与深度感知设备中的下位机连接。
25、在其中一个实施例中,上位机还与深度感知设备中的深度视觉组件连接,用于读取深度视觉组件上传的图像数据。
26、上述深度感知模组、设备和系统,将编码器组件与舵机连接,通过编码器组件实时测量舵机的旋转角度。将舵机与深度视觉组件连接,通过舵机旋转以带动深度视觉组件同步旋转,进而,深度视觉组件依据本身具有的水平视场角,加上随舵机同步旋转的旋转角度,则能拥有更大的感知范围。深度视觉组件的感知范围为,水平视场角与编码器组件所测量出的舵机的旋转角度之和所对应的视野范围。
技术特征:
1.一种深度感知模组,其特征在于,所述深度感知模组包括:
2.根据权利要求1所述的模组,其特征在于,所述舵机带动所述深度视觉组件同步旋转的角度范围为0°~180°。
3.根据权利要求1所述的模组,其特征在于,所述深度视觉组件的感知视场角为90°。
4.根据权利要求1所述的模组,其特征在于,所述模组还包括:
5.根据权利要求4所述的模组,其特征在于,所述深度视觉组件包括:
6.根据权利要求4所述的模组,其特征在于,所述编码器组件包括:
7.根据权利要求1所述的模组,其特征在于,所述舵机与舵机驱动器连接,所述舵机在所述舵机驱动器的驱动下旋转。
8.一种深度感知设备,其特征在于,所述设备包括:
9.一种深度感知系统,其特征在于,所述系统包括:
10.根据权利要求9所述的深度感知系统,其特征在于,所述上位机还与所述深度感知设备中的深度视觉组件连接,用于读取所述深度视觉组件上传的图像数据。
技术总结
本申请涉及一种深度感知模组、设备和系统。所述深度感知模组包括:深度视觉组件;舵机,与深度视觉组件连接,用于带动深度视觉组件同步旋转;编码器组件,与舵机连接,用于测量舵机的旋转角度。采用本深度感知模组,深度视觉组件依据本身具有的水平视场角,加上随舵机同步旋转的旋转角度,则能拥有更大的感知范围,且采用本深度感知模组有利于实现机器人的感知避障。
技术研发人员:黄寅
受保护的技术使用者:江苏普渡机器人有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!