一种六自由度ROV机械臂水上操作副手及控制系统的制作方法
本技术涉及机械臂控制,特别涉及一种六自由度rov机械臂水上操作副手及控制系统。
背景技术:
1、目前,rov(remotely operated vechicle)是当前海洋探索研究的主要工具之一。rov上面的作业工具更是整个系统的重要组成,而作为rov上面的作业工具,其组成主要包括机械臂以及安装在机械臂上面的末端执行工具。
2、现有rov搭载的水下机械臂,由于应用在水下,定位和控制完全靠dvl(dopplervelocity log),是一种水下测量设备,用于测量船舶的速度和方向)提供航向和坐标参考,机械臂的操控精准度,取决于dvl的测量精度和算法优劣,水上缺乏较直观的控制参考,类似控制器一样操控水下的机械臂。
技术实现思路
1、本实用新型的目的在于解决现有技术中的rov搭载的水下机械臂,由于应用在水下,定位和控制完全靠dvl提供航向和坐标参考,机械臂的操控精准度,取决于dvl的测量精度和算法优劣,水上缺乏较直观的控制参考的技术问题。
2、为解决上述技术问题,本实用新型提供一种六自由度rov机械臂水上操作副手及控制系统,其包括:控制臂和控制器,控制臂和外界的机械臂均与控制器电连接,控制臂具有固定端和自由端,控制臂通过固定端与外界物体连接,控制臂上设置有多个对自由端提供支持的活动关节,自由端可受外力牵引而移动,控制器可控制外界机械臂抓手按照自由端移动的轨迹进行移动。
3、进一步,活动关节设置在固定端与自由端之间,控制臂上的活动关节数量为5个以上。
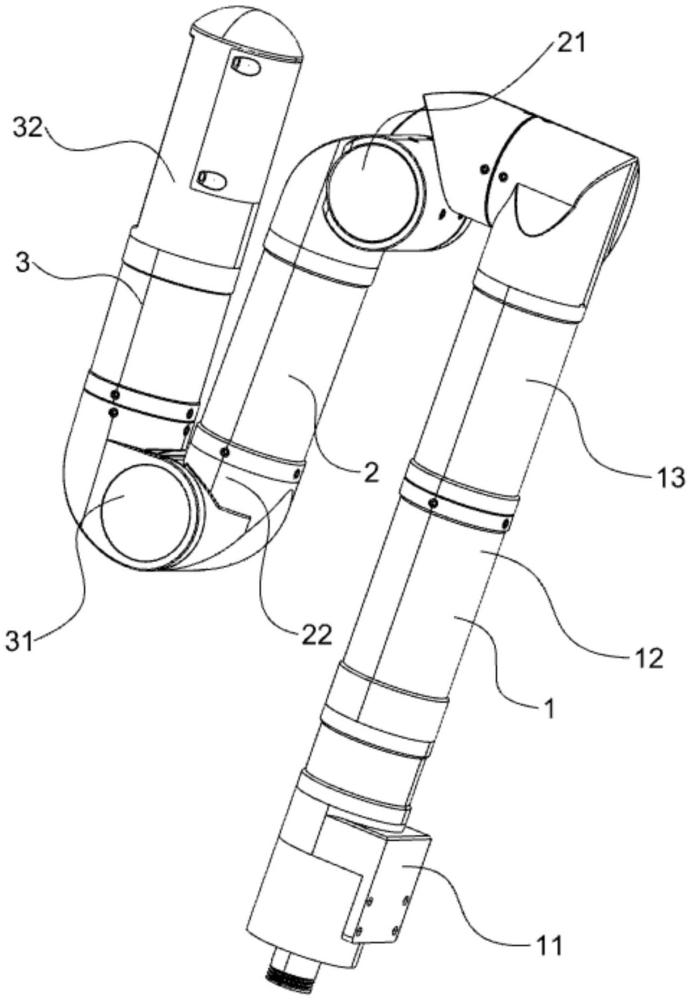
4、进一步,控制臂包括两两之间依次铰接的大臂、连接臂和小臂,自由端设置在小臂远离连接臂的一端。
5、进一步,大臂、连接臂和小臂均具有活动连接的第一部分和第二部分,自由端设置在小臂的第二部分上。
6、进一步,大臂和小臂的第一部分和第二部分均同轴设置且可相对周向旋转;连接臂第一部分的一端和大臂第二部分旋转连接,另一端与连接臂第二部分一端铰接,连接臂第二部分远离连接臂第一部分的一端与小臂第一部分铰接。
7、进一步,还包括角度传感器,角度传感器与控制器电连接,大臂、连接臂、小臂的第一部分和第二部分的活动连接处及之间的铰接处均设置有转轴,角度传感器的数量与转轴的数量相同并与转轴一一对应设置,以记录活动关节的旋转角度。
8、进一步,还包括控制机构,控制机构与控制器电连接,用于控制外界的机械臂运作。
9、进一步,控制机构包括设置在控制臂自由端上的第一开关,第一开关用于控制外界机械臂抓手张开或闭合。
10、进一步,控制机构包括设置在控制臂自由端上的第二开关,第二开关用于控制抓手的周向角度。
11、进一步,活动关节上均设置有阻尼部件,阻尼部件对活动关节提供阻尼作用。
12、由上述技术方案可知,本实用新型的有益效果为:控制臂可以将自由端移动的数据传输至控制器,控制器根据自由端移动的数据控制外界机械臂活动,使机械臂的机械手按自由端的移动轨迹进行移动,从而使操作人员可以精确的对机械臂抓手进行控制和定位。
技术特征:
1.一种六自由度rov机械臂水上操作副手及控制系统,其特征在于,包括控制臂和控制器,控制臂和外界的机械臂均与控制器电连接,控制臂具有固定端和自由端,控制臂通过固定端与外界物体连接,控制臂上设置有多个对自由端提供支持的活动关节,自由端可受外力牵引而移动,控制器可控制外界机械臂抓手按照自由端移动的轨迹进行移动。
2.根据权利要求1所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,活动关节设置在固定端与自由端之间,控制臂上的活动关节数量为5个以上。
3.根据权利要求2所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,控制臂包括两两之间依次铰接的大臂、连接臂和小臂,自由端设置在小臂远离连接臂的一端。
4.根据权利要求3所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,大臂、连接臂和小臂均具有活动连接的第一部分和第二部分,自由端设置在小臂的第二部分上。
5.根据权利要求4所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,大臂和小臂的第一部分和第二部分均同轴设置且可相对周向旋转;连接臂第一部分的一端和大臂第二部分旋转连接,另一端与连接臂第二部分一端铰接,连接臂第二部分远离连接臂第一部分的一端与小臂第一部分铰接。
6.根据权利要求4所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,还包括角度传感器,角度传感器与控制器电连接,大臂、连接臂、小臂的第一部分和第二部分的活动连接处及之间的铰接处均设置有转轴,角度传感器的数量与转轴的数量相同并与转轴一一对应设置,以记录活动关节的旋转角度。
7.根据权利要求1所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,还包括控制机构,控制机构与控制器电连接,用于控制外界的机械臂运作。
8.根据权利要求7所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,控制机构包括设置在控制臂自由端上的第一开关,第一开关用于控制外界机械臂抓手张开或闭合。
9.根据权利要求7或8任意一项所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,控制机构包括设置在控制臂自由端上的第二开关,第二开关用于控制抓手的周向角度。
10.根据权利要求6所述的六自由度rov机械臂水上操作副手及控制系统,其特征在于,活动关节上均设置有阻尼部件,阻尼部件对活动关节提供阻尼作用。
技术总结
本技术提供一种六自由度ROV机械臂水上操作副手及控制系统,其包括控制臂和控制器,控制臂和外界的机械臂均与控制器电连接,控制臂具有固定端和自由端,控制臂通过固定端与外界物体连接,控制臂上设置有多个对自由端提供支持的活动关节,自由端可受外力牵引而移动,控制器可控制外界机械臂抓手按照自由端移动的轨迹进行移动;控制臂可以将自由端移动的数据传输至控制器,控制器根据自由端移动的数据控制外界机械臂活动,使机械臂的机械手按自由端的移动轨迹进行移动,从而使操作人员可以精确的对机械臂抓手进行控制和定位。
技术研发人员:谢晓华,黄俊平,邱海虹
受保护的技术使用者:杭州数字吉影科技有限公司
技术研发日:20230515
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!