一种机器人导轨装置的制作方法
本技术属于机器人导轨,具体涉及一种机器人导轨装置。
背景技术:
1、工业机器人作为生产自动化的代表,被广泛应用于工业的各个领域,如汽车制造、化工等行业的自动化生产线上的焊接,搬运,喷涂等作业中,工业机器人在自动化生产中代替人完成高质量的工作,提高了产品的生产效率和质量,同时也对工业机器人的作业时的稳定性,操作范围,智能规划提出了要求,工业智能机器人在出厂前试验模拟时往往需要配合相应的导轨进行使用。
2、现有技术如申请号为“cn202021528713.2”,公开了一种自动化机器人的移动导轨,上述技术方案通过设置的气压罐和活塞杆能够将吸盘内的空气抽出,使得四个吸盘吸住地面,大大增加了装置的稳定性,防止机器人运动时带来的抖动力促使移动导轨发生位移,从而造成机器人生产次品或废品产生;然而在实际使用的过程中,上述技术方案的柱形管高度是固定的,当导轨放置在不够平整的地面时,其中一个柱形管可能是悬空的,这就会导致导轨放置的不够稳定,机器人在导轨上运行时,由于导轨是不稳定的,因而仍然容易导致机器人发生晃动,进而会生产出较多的次品或废品而影响工厂的经济效益。
3、为解决上述问题,本申请中提出一种机器人导轨装置。
技术实现思路
1、为解决上述背景技术中提出的问题。本实用新型提供了一种机器人导轨装置,具有固定更加稳固的特点。
2、为实现上述目的,本实用新型提供如下技术方案:
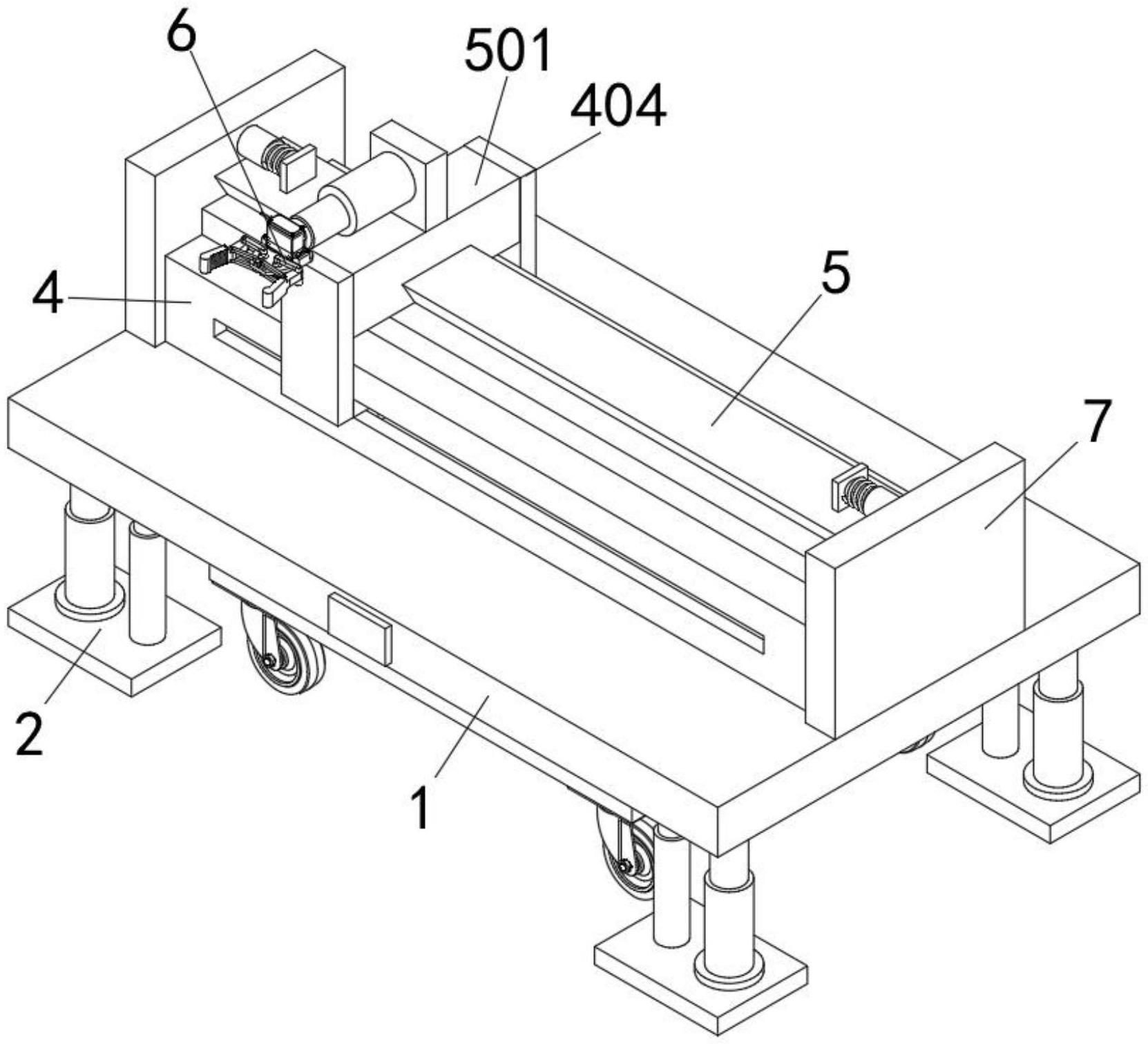
3、一种机器人导轨装置,包括安装板、安装于所述安装板上方的导轨及滑动连接于所述导轨上的机器人,所述安装板的底端四角均安装有支撑构件,所述支撑构件包括连接于所述安装板底端的第一螺纹杆及设置于所述安装板下方的支撑板,所述支撑板的顶端转动安装有螺纹套筒,所述螺纹套筒内部螺纹安装有所述第一螺纹杆,所述支撑板的顶端安装有第一伸缩杆,所述第一伸缩杆的伸缩端安装有连接板,所述连接板套设在所述第一螺纹杆上。
4、作为本实用新型一种机器人导轨装置优选的,所述支撑板的底端安装有防滑橡胶垫,防滑橡胶垫能够起到防滑的作用,避免机器人在进行运作时由于抖动而造成该导轨装置发生位移。
5、作为本实用新型一种机器人导轨装置优选的,所述安装板的底端安装有液压伸缩杆,所述液压伸缩杆的伸缩端安装有固定板,所述固定板的底端四角均安装有万向轮,通过设置的液压伸缩杆能够推动万向轮向下移动,其与地面接触将整个导轨装置撑起之后,能够方便的对推动该装置进行移动。
6、作为本实用新型一种机器人导轨装置优选的,所述安装板的顶端安装有防护箱,所述防护箱内开设有滑槽,所述滑槽的内部一侧安装有电机,所述电机的输出端安装有第二螺纹杆,所述第二螺纹杆上螺纹安装有第一滑块,所述第一滑块相对的两侧均安装有连接竖板,第二螺纹杆设置在防护箱的内部,因而避免机器人工作搬运物体时不小心掉落而将第二螺纹杆砸变形,同时只在防护箱的两侧开设有较窄的滑槽,因而能够减少灰尘等杂质落入到滑槽内部的情况。
7、作为本实用新型一种机器人导轨装置优选的,所述导轨处于防护箱的上方,所述导轨的顶端滑动安装有第二滑块,所述第二滑块与所述第一滑块相对的两侧均通过一个连接竖板相连接,所述第二滑块的顶端安装有所述机器人。
8、作为本实用新型一种机器人导轨装置优选的,所述安装板的顶端安装有两个缓冲构件,所述缓冲构件包括设置于所述安装板顶端呈对称分布的两个安装架,两个所述安装架相对应的一侧均安装有第二伸缩杆,所述第二伸缩杆上套接有弹簧,所述第二伸缩杆的伸缩端安装有缓冲板。
9、与现有技术相比,本实用新型的有益效果是:
10、1、通过设置的四个支撑构件能够对安装板的四角高度进行分别调整,因而根据地面的平整情况,能够使得四个支撑板均能够与地面稳定接触,解决了现有技术中因难以对支撑板的高度进行调整而导致机器人导轨放置不稳定的技术问题,将其放置稳定之后,机器人运行也能够更加的稳定,避免出现因装置晃动导致的残次品的出现,保证了公司的经济效益;
11、2、通过设置的缓冲构件能够对第一滑块起到缓冲的作用,避免其直接碰撞在板壁上而导致机器人发生较大的震动。
技术特征:
1.一种机器人导轨装置,包括安装板(1)、安装于所述安装板(1)上方的导轨(5)及滑动连接于所述导轨(5)上的机器人(6),其特征在于:所述安装板(1)的底端四角均安装有支撑构件(2),所述支撑构件(2)包括连接于所述安装板(1)底端的第一螺纹杆(201)及设置于所述安装板(1)下方的支撑板(203),所述支撑板(203)的顶端转动安装有螺纹套筒(202),所述螺纹套筒(202)内部螺纹安装有所述第一螺纹杆(201),所述支撑板(203)的顶端安装有第一伸缩杆(204),所述第一伸缩杆(204)的伸缩端安装有连接板(205),所述连接板(205)套设在所述第一螺纹杆(201)上。
2.根据权利要求1所述的机器人导轨装置,其特征在于:所述支撑板(203)的底端安装有防滑橡胶垫。
3.根据权利要求1所述的机器人导轨装置,其特征在于:所述安装板(1)的底端安装有液压伸缩杆(3),所述液压伸缩杆(3)的伸缩端安装有固定板(301),所述固定板(301)的底端四角均安装有万向轮(302)。
4.根据权利要求1所述的机器人导轨装置,其特征在于:所述安装板(1)的顶端安装有防护箱(4),所述防护箱(4)内开设有滑槽(401),所述滑槽(401)的内部一侧安装有电机(402),所述电机(402)的输出端安装有第二螺纹杆(403),所述第二螺纹杆(403)上螺纹安装有第一滑块(404),所述第一滑块(404)相对的两侧均安装有连接竖板(405)。
5.根据权利要求4所述的机器人导轨装置,其特征在于:所述导轨(5)处于防护箱(4)的上方,所述导轨(5)的顶端滑动安装有第二滑块(501),所述第二滑块(501)与所述第一滑块(404)相对的两侧均通过一个连接竖板(405)相连接,所述第二滑块(501)的顶端安装有所述机器人(6)。
6.根据权利要求1所述的机器人导轨装置,其特征在于:所述安装板(1)的顶端安装有两个缓冲构件(7),所述缓冲构件(7)包括设置于所述安装板(1)顶端呈对称分布的两个安装架(701),两个所述安装架(701)相对应的一侧均安装有第二伸缩杆(702),所述第二伸缩杆(702)上套接有弹簧(703),所述第二伸缩杆(702)的伸缩端安装有缓冲板(704)。
技术总结
本技术属于机器人导轨技术领域,尤其为一种机器人导轨装置,包括安装板、安装于所述安装板上方的导轨及滑动连接于所述导轨上的机器人,所述安装板的底端四角均安装有支撑构件,所述支撑构件包括连接于所述安装板底端的第一螺纹杆及设置于所述安装板下方的支撑板,所述支撑板的顶端转动安装有螺纹套筒,所述螺纹套筒内部螺纹安装有所述第一螺纹杆;本技术通过设置的四个支撑构件能够解决现有技术中因难以对支撑板的高度进行调整而导致机器人导轨放置不稳定的技术问题,能够实现机器人的运行更加的稳定,避免出现因装置晃动导致残次品的出现,保证了产品的高质生产。
技术研发人员:丁皞,吴杰,邢天鹏
受保护的技术使用者:上海芸志机械自动化有限公司
技术研发日:20230523
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!