一种机械制造用机械夹持手臂的制作方法
本技术涉及机械夹持手臂,具体为一种机械制造用机械夹持手臂。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、娱乐服务以及太空探索等领域都能见到它的身影,尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令。
2、在实现本实用新型的过程中,发明人发现现有技术中至少存在如下问题没有得到解决:现有的机械夹持手臂在进行夹持异形工件工作时,夹板与异形工件接触的面积较小,进而对异形工件夹持容易掉落造成损坏,因此,我们提出一种机械制造用机械夹持手臂。
技术实现思路
1、本实用新型的目的在于提供一种机械制造用机械夹持手臂,解决了背景技术中所提出的问题。
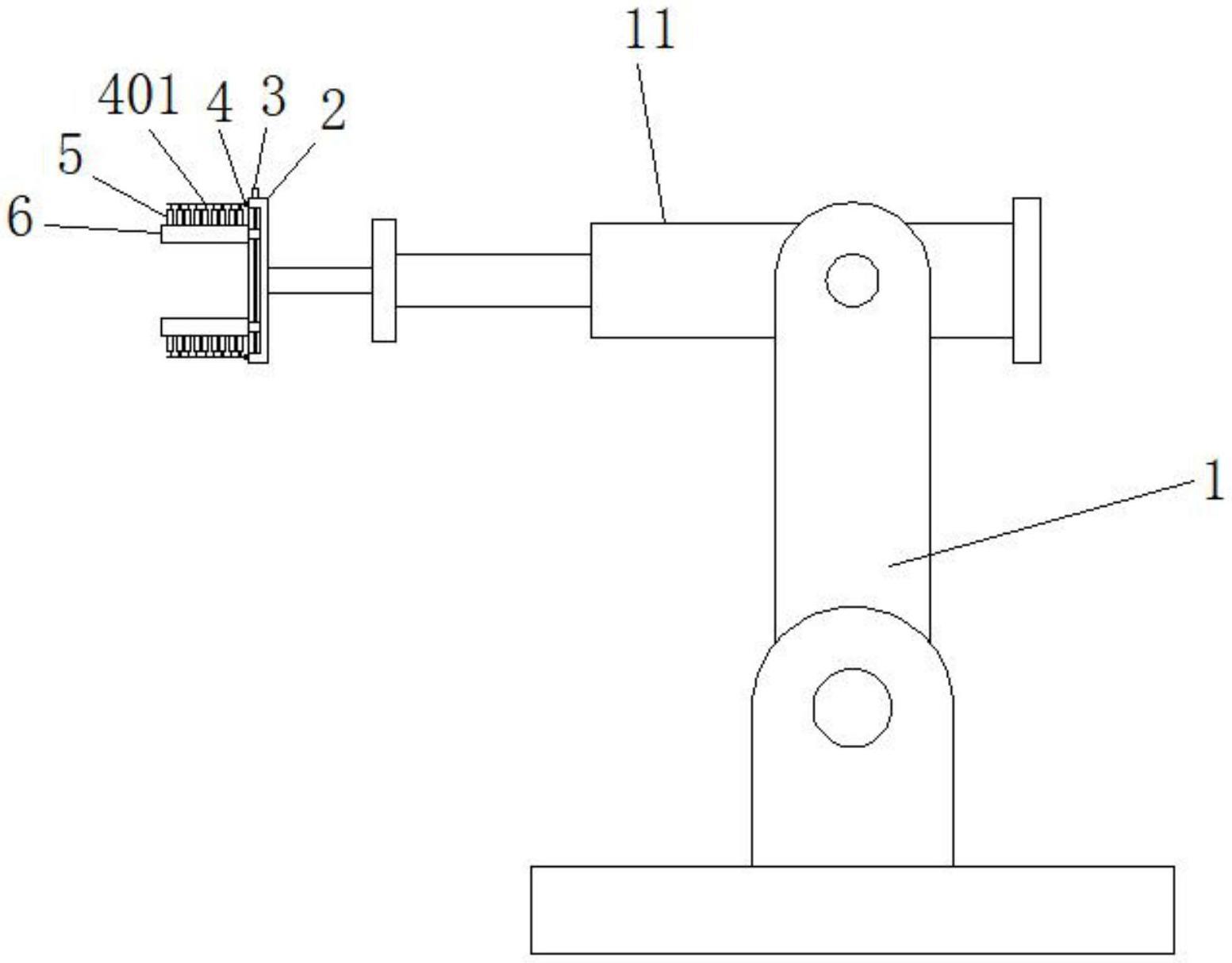
2、为实现上述目的,本实用新型提供如下技术方案:一种机械制造用机械夹持手臂,包括支撑臂,所述支撑臂上安装有转动臂,所述转动臂上安装有连接板,所述连接板远离转动臂的一端开设有调节槽,所述调节槽的内腔滑动连接有两个相同的调节块,且所述调节槽的内腔两侧之间转动连接有双向丝杆,两个所述调节块上均固定连接有夹板,所述连接板的外侧一端安装有伺服电机;两个所述夹板的外侧一端均等距固定连接有多个相同的气筒,且两个所述夹板上均等距开设有多个相同的通孔,多个所述气筒内均滑动连接有活塞,多个所述活塞上均固定连接有插杆,多个所述插杆分别滑动贯穿多个所述气筒置于气筒的外侧,所述连接板靠近调节槽的一端两侧均安装有充气泵,两个所述充气泵的出气端均连通有导管,两个所述导管均通过多个相同的连接管分别与多个所述气筒连通,多个所述连接管内均安装有单向阀。
3、作为本申请技术方案的一可选方案,所述连接管的外侧一端连通有泄气管,所述泄气管内安装有电磁阀门,用于排出气筒内的气体,便于插杆下次进行使用。
4、作为本申请技术方案的一可选方案,所述活塞与气筒的内腔顶部之间固定连接有弹簧,用于拉动插杆进行自动复位。
5、作为本申请技术方案的一可选方案,两个所述夹板的相对一端均固定连接有第一橡胶垫,多个所述插杆的外侧一端均固定连接有第二橡胶垫,用于提高夹板和插杆与夹持工件之间的摩擦力,进而提高夹持手臂对工件夹持的稳定性。
6、作为本申请技术方案的一可选方案,所述弹簧的拉力大于活塞与气筒内壁之间的摩擦力,用于保证弹簧的拉力将插杆进行复位。
7、与现有技术相比,本申请技术方案的有益效果如下:
8、1.本申请技术方案通过支撑臂、转动臂、连接板、调节槽、调节块、双向丝杆、伺服电机、夹板、通孔、气筒、插杆、活塞、充气泵、导管、连接管和单向阀的设置,通过伺服电机驱动双向丝杆转动,进而带动夹板移动对工件进行夹持,当异形工件夹持时,夹板先与异形工件接触,然后通过启动充气泵推动活塞移动,进而推动多个插杆挤压在异形工件的不同位置,进而提高夹持手臂与异形工件外侧的接触面接,进而提高夹持手臂对异形工件夹持的稳定性,进一步的避免对异形工件夹持时掉落造成损坏。
9、2.本申请技术方案通过泄气管、电磁阀门和弹簧的设置,通过电磁阀门打开能够将气筒内的气体排出,同时弹簧的拉力拉动活塞复位,进而使插杆自动复位,进一步的便于对下个工件进行夹持。
技术特征:
1.一种机械制造用机械夹持手臂,包括支撑臂(1),其特征在于:所述支撑臂(1)上安装有转动臂(11),所述转动臂(11)上安装有连接板(2),所述连接板(2)远离转动臂(11)的一端开设有调节槽(201),所述调节槽(201)的内腔滑动连接有两个相同的调节块(202),且所述调节槽(201)的内腔两侧之间转动连接有双向丝杆(203),两个所述调节块(202)上均固定连接有夹板(6),所述连接板(2)的外侧一端安装有伺服电机(3);
2.根据权利要求1所述的一种机械制造用机械夹持手臂,其特征在于:所述连接管(7)的外侧一端连通有泄气管(8),所述泄气管(8)内安装有电磁阀门(801)。
3.根据权利要求1所述的一种机械制造用机械夹持手臂,其特征在于:所述活塞与气筒(5)的内腔顶部之间固定连接有弹簧(9)。
4.根据权利要求1所述的一种机械制造用机械夹持手臂,其特征在于:两个所述夹板(6)的相对一端均固定连接有第一橡胶垫(602),多个所述插杆(10)的外侧一端均固定连接有第二橡胶垫(1001)。
5.根据权利要求3所述的一种机械制造用机械夹持手臂,其特征在于:所述弹簧(9)的拉力大于活塞与气筒(5)内壁之间的摩擦力。
技术总结
本技术涉及机械夹持手臂技术领域,公开了一种机械制造用机械夹持手臂,包括支撑臂,支撑臂上安装有转动臂,转动臂上安装有连接板,连接板远离转动臂的一端开设有调节槽,调节槽的内腔滑动连接有两个相同的调节块,且调节槽的内腔两侧之间转动连接有双向丝杆,两个调节块上均固定连接有夹板。本技术通过伺服电机驱动双向丝杆转动,进而带动夹板移动对工件进行夹持,当异形工件夹持时,夹板先与异形工件接触,然后通过启动充气泵推动活塞移动,进而推动多个插杆挤压在异形工件的不同位置,进而提高夹持手臂与异形工件外侧的接触面接,进而提高夹持手臂对异形工件夹持的稳定性,进一步的避免对异形工件夹持时掉落造成损坏。
技术研发人员:刘巧,张磊,钟锐,李文马,田永亮,徐超
受保护的技术使用者:绵竹市鑫达机械制造有限责任公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!