一种视觉机器人摄像头转动机构的制作方法
本技术涉及视觉机器人,特别是涉及一种视觉机器人摄像头转动机构。
背景技术:
1、视觉机器人一般指机器人视觉。机器人视觉,是指不仅要把视觉信息作为输入,而且还要对这些信息进行处理,进而提取出有用的信息提供给机器人。今天的视觉技术已经能够识别人的手势和面部表情了,即人机界面的功能也可以实现。
2、现有的视觉机器人通过在摄像头内部添加自动化识别模块,已经具备可识别传达至控制系统的功能,也为自动化控制系统提供了便利性,主要是以拍照比对检测产品的外观为主,普遍是将摄像头安装在可灵活翻转的机械手臂上,通过机械手臂进行转动,一般摄像机的镜头为广角高清摄像头,但被检测产品的形状各异,即使摄像头为广角,并且配合可扭动的机械臂,也会有一些边缝不能被摄像头所检测到,因此在自动化检测结束后,还需要人工对细微地方进行查看,但这样就会使工作效率降低,同时消耗人力,为此我们提出一种视觉机器人摄像头转动机构。
技术实现思路
1、针对上述问题,本实用新型提供了一种视觉机器人摄像头转动机构,具有便于转动摄像头,方便配合扭动调整角度的机械臂进行角度调整,提高对产品检测的细致程度,并减少人工检测的视觉疲劳,同时提高工作效率。
2、本实用新型的技术方案是:
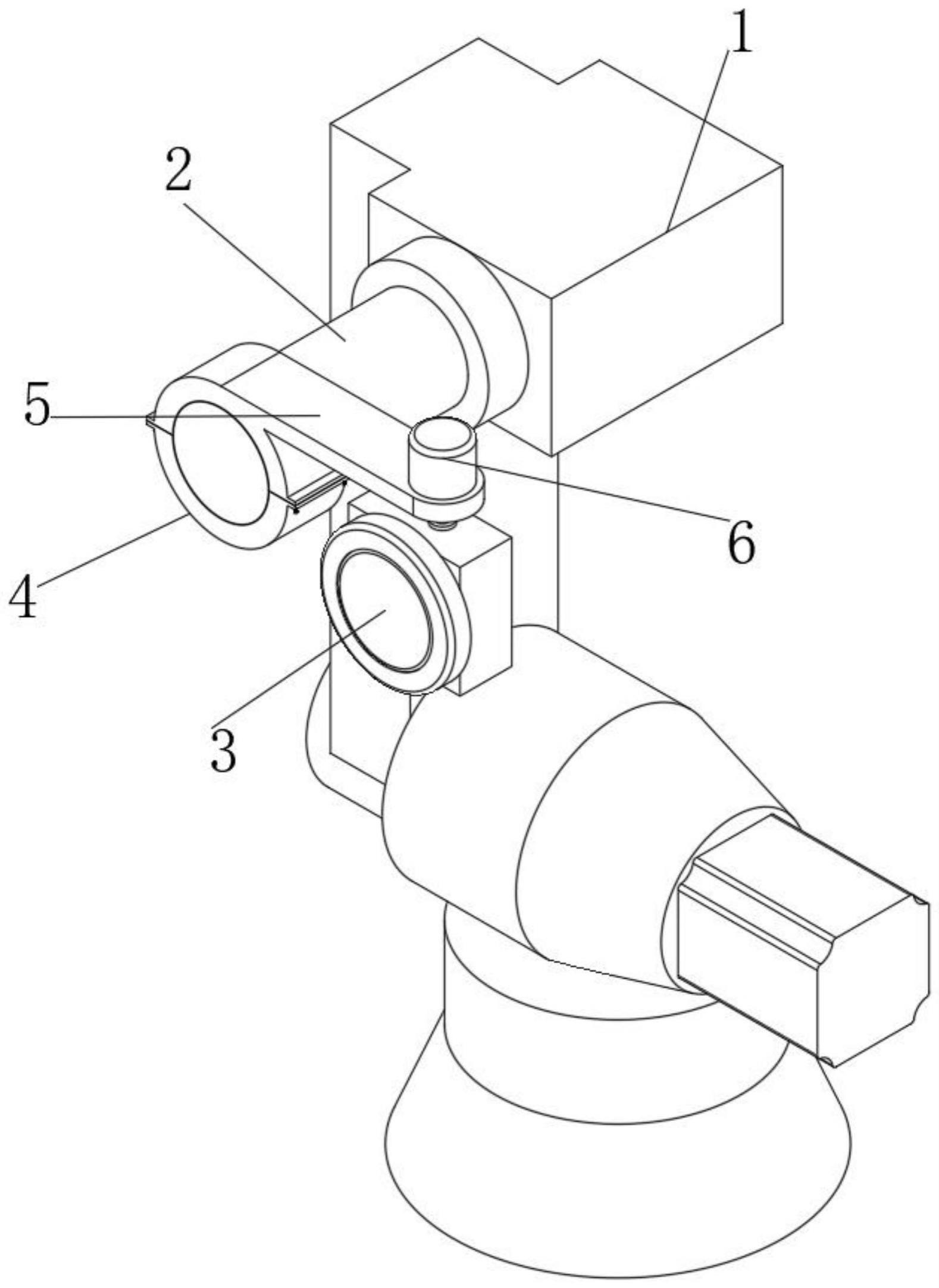
3、一种视觉机器人摄像头转动机构,包括视觉机器人,所述视觉机器人的顶端铰接有机械臂,所述机械臂远离视觉机器人的一端外侧设有摄像头,所述摄像头的一侧设有套设在机械臂外表面的连接套,所述连接套的顶端固定安装有向摄像头延伸的展板,所述展板的顶面设有驱动马达,所述驱动马达的输出端插设有转轴,所述摄像头的一侧面设有模块盒,所述转轴的底端固定在模块盒的外表面。
4、在进一步的技术方案中,所述连接套包括固定在展板一端的第一固定套,所述第一固定套的底端设有第二固定套,所述第一固定套和第二固定套的相对面均套设在机械臂的端头处,所述第一固定套的底端两侧均固定安装有闭合板,所述第二固定套的顶端两侧均固定安装有贴合板,所述闭合板的底面固定安装有两个螺栓,所述贴合板的顶面两侧均开设有穿孔,所述螺栓贯穿穿孔延伸至贴合板的底面,所述贴合板的底面设有垫片和固定螺母,所述垫片和固定螺母均套设在螺栓的外表面,且垫片的顶面与贴合板的底面紧密贴合,所述固定螺母与螺栓螺纹连接。
5、在进一步的技术方案中,所述展板远离连接套的一端顶面开设有通孔,所述通孔的内壁固定安装有轴承,所述转轴的顶端外壁固定在轴承的内壁。
6、在进一步的技术方案中,所述摄像头的模块盒表面固定安装有固定块,所述转轴的底端固定在固定块的表面。
7、在进一步的技术方案中,所述第一固定套和第二固定套的相对面设有防滑垫,且防滑垫与机械臂的表面紧密贴合。
8、本实用新型的有益效果是:
9、1、通过设置摄像头一侧面的模块盒与驱动马达输出端的转轴连接,可以使摄像头可以在不用机械臂转向的情况下,具有可转动调节角度的效果,同时展板的设置,可以使驱动马达具有安装位置,另外展板的设置还可让摄像头的转动具有活动空间,避免与机械臂的表面产生摩擦,该装置的设置,可以使摄像头自身具有转动的效果,便于在特定的角度时进行角度微调,有利于检测产品,提高视觉机器人的实用效果;
10、2、通过设置连接套由第一固定套、第二固定套通过螺纹连接组成,可以使连接套的安装具有灵活组装的效果,便于安装。
技术特征:
1.一种视觉机器人摄像头转动机构,包括视觉机器人(1),所述视觉机器人(1)的顶端铰接有机械臂(2),所述机械臂(2)远离视觉机器人(1)的一端外侧设有摄像头(3),其特征在于:所述摄像头(3)的一侧设有套设在机械臂(2)外表面的连接套(4),所述连接套(4)的顶端固定安装有向摄像头(3)延伸的展板(5),所述展板(5)的顶面设有驱动马达(6),所述驱动马达(6)的输出端插设有转轴(7),所述摄像头(3)的一侧面设有模块盒,所述转轴(7)的底端固定在模块盒的外表面。
2.根据权利要求1所述的一种视觉机器人摄像头转动机构,其特征在于:所述连接套(4)包括固定在展板(5)一端的第一固定套(41),所述第一固定套(41)的底端设有第二固定套(42),所述第一固定套(41)和第二固定套(42)的相对面均套设在机械臂(2)的端头处,所述第一固定套(41)的底端两侧均固定安装有闭合板(43),所述第二固定套(42)的顶端两侧均固定安装有贴合板(44),所述闭合板(43)的底面固定安装有两个螺栓(45),所述贴合板(44)的顶面两侧均开设有穿孔(46),所述螺栓(45)贯穿穿孔(46)延伸至贴合板(44)的底面,所述贴合板(44)的底面设有垫片(47)和固定螺母(48),所述垫片(47)和固定螺母(48)均套设在螺栓(45)的外表面,且垫片(47)的顶面与贴合板(44)的底面紧密贴合,所述固定螺母(48)与螺栓(45)螺纹连接。
3.根据权利要求1所述的一种视觉机器人摄像头转动机构,其特征在于:所述展板(5)远离连接套(4)的一端顶面开设有通孔(8),所述通孔(8)的内壁固定安装有轴承(9),所述转轴(7)的顶端外壁固定在轴承(9)的内壁。
4.根据权利要求1所述的一种视觉机器人摄像头转动机构,其特征在于:所述摄像头(3)的模块盒表面固定安装有固定块(10),所述转轴(7)的底端固定在固定块(10)的表面。
5.根据权利要求2所述的一种视觉机器人摄像头转动机构,其特征在于:所述第一固定套(41)和第二固定套(42)的相对面设有防滑垫,且防滑垫与机械臂(2)的表面紧密贴合。
技术总结
本技术涉及视觉机器人技术领域的一种视觉机器人摄像头转动机构,包括视觉机器人,所述视觉机器人的顶端铰接有机械臂,所述机械臂远离视觉机器人的一端外侧设有摄像头,所述摄像头的一侧设有套设在机械臂外表面的连接套。通过设置摄像头一侧面的模块盒与驱动马达输出端的转轴连接,可以使摄像头可以在不用机械臂转向的情况下,具有可转动调节角度的效果,同时展板的设置,可以使驱动马达具有安装位置,另外展板的设置还可让摄像头的转动具有活动空间,避免与机械臂的表面产生摩擦,该装置的设置,可以使摄像头自身具有转动的效果,便于在特定的角度时进行角度微调,有利于检测产品,提高视觉机器人的实用效果。
技术研发人员:徐亮,宋增坤
受保护的技术使用者:浙江三一装备有限公司
技术研发日:20230525
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!