一种搬运时实现换向的桁架机械手的制作方法
本技术涉及桁架机械手,具体涉及一种搬运时实现换向的桁架机械手。
背景技术:
1、现有申请号为cn202223005856.7公开发布了一种搬运时实现换向的桁架机械手,涉及搬运机械技术领域,其中包括若干对呈对称分布的桁架立柱,所述的每行桁架立柱上端均设有行车轨道,两行车轨道间设有与行车轨道相滑动式插嵌连接固定的横移行车,所述的横移行车下端设有换向机械手组件。所述的换向机械手组件包括过渡连接座,所述的过渡连接座下端两侧均设有夹取组件连接板,所述的夹取组件连接板下端两侧均设有夹取组件,所述的过渡连接座后端设有z轴升降柱。具有结构简单、运行稳定性好和转向灵活的特点。解决了灵活度不够的问题。搬运过程实现零件换向的功能广。
2、现有技术存在以下不足:上述的一种搬运时实现换向的桁架机械手虽然具有结构简单、运行稳定性好和转向灵活的特点,但是上述的一种搬运时实现换向的桁架机械手中是通过转向气缸来带动连接板以及夹取组件进行旋转的,从而使得四个夹取组件夹取的物件能围绕气缸进行旋转换向,这时就会改变各个物件的位置,而有些部件在进行夹取运输工作时,其位置是不能进行更换的,而上述的一种搬运时实现换向的桁架机械手必须通过更换物件的位置来改变物件的朝向,就会影响物件的加工结果。
3、因此,发明一种搬运时实现换向的桁架机械手很有必要。
技术实现思路
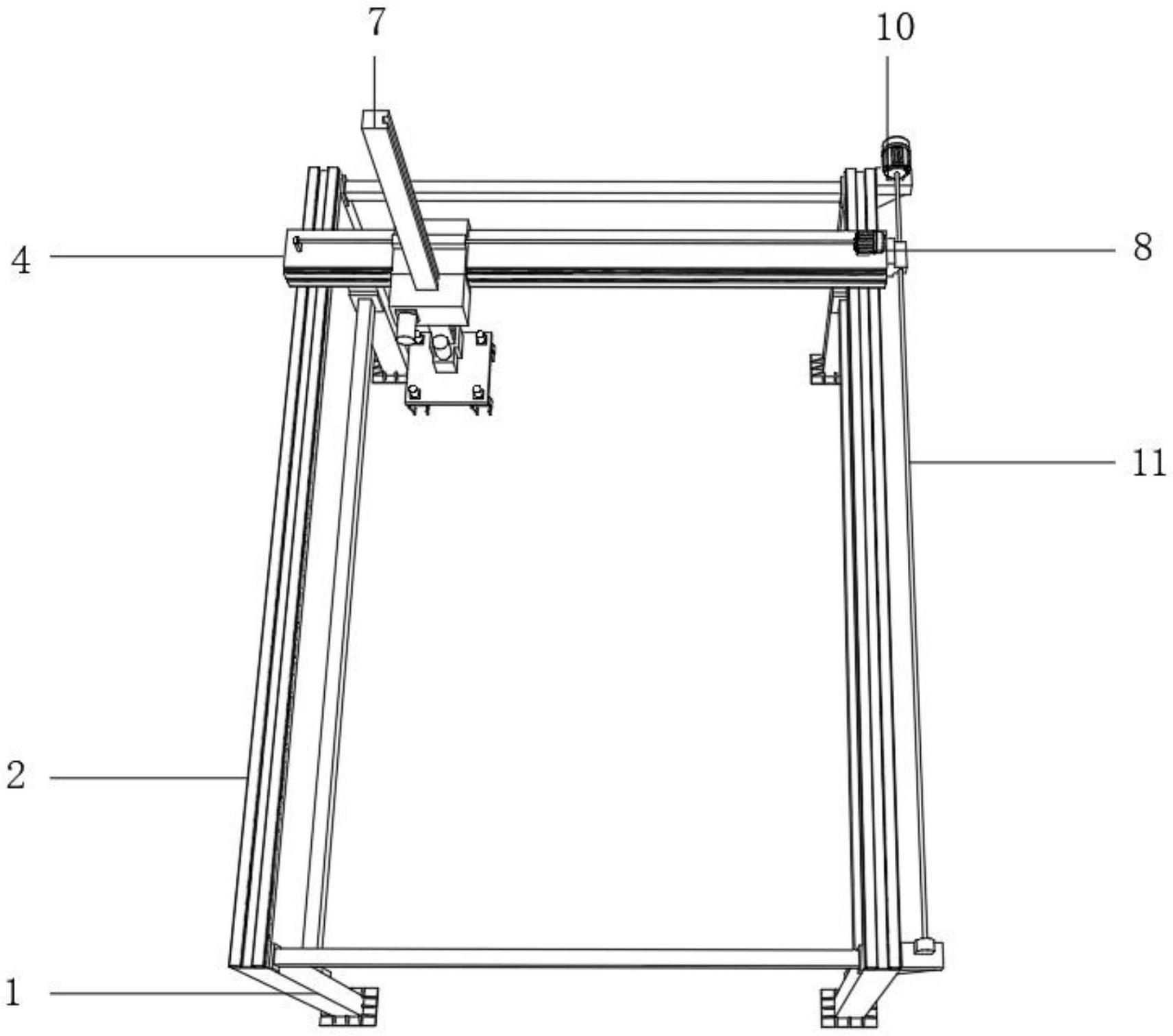
1、为了实现上述目的,本实用新型提供如下技术方案:一种搬运时实现换向的桁架机械手,包括支撑架,所述支撑架顶部两侧都固定安装有导轨,所述导轨顶部都滑动连接有滑块,所述滑块顶部固定安装有滑动杆,所述滑动杆正面固定安装有滑轨,所述滑轨外壁滑动连接有移动块;
2、所述移动块内壁滑动连接有升降杆,所述支撑架外壁与所述滑动杆外壁都固定安装有制动装置,所述制动装置用于带动滑动杆与移动块进行移动,所述升降杆底部安装转向装置,所述转向装置用于带动物料进行转向。
3、优选的,所述制动装置包括:伺服电机一、丝杆一;
4、所述伺服电机一输出端与所述丝杆一外壁固定连接,所述伺服电机一底部与所述滑动杆左侧顶部固定连接,所述丝杆一外壁与所述移动块靠近滑动杆的那一侧内壁螺纹连接。
5、优选的,所述制动装置还包括:伺服电机二、丝杆二;
6、所述伺服电机二输出端与所述丝杆二外壁固定连接,所述伺服电机二底部与所述支撑架右侧顶部固定连接,所述丝杆二外壁与所述滑动杆右侧螺纹连接。
7、优选的,所述转向装置包括:伺服电机四、转动平台、四个伺服马达;
8、所述伺服电机四输出端与所述转动平台顶部固定连接,四个所述伺服马达底部分别与所述转动平台顶部四个拐角处固定连接,四个所述伺服马达输出端分别与所述转动平台顶部四个拐角处内壁转动连接。
9、优选的,伺服马达底部固定安装有双向电动伸缩杆,所述双向电动伸缩杆两侧输出端都固定安装有夹块,所述伺服电机四顶部与所述升降杆顶部固定连接。
10、优选的,所述移动块正面固定安装有伺服电机三,所述升降杆靠近所述伺服电机三的那一侧开设有齿条,所述伺服电机三输出端与所述移动块内壁转动连接。
11、优选的,所述伺服电机三输出端固定安装有齿轮,所述齿轮与所述齿条相互啮合。
12、本实用新型的有益效果是:通过设置伺服电机四、转动平台、伺服马达,在将物件夹取起来过后,通过需要在物件移动时带动物件进行旋转时,就能通过伺服马达带动各个双向电动伸缩杆和夹块进行旋转,从而带动物件只旋转方向不改变位置,同时在正常无要求时,可以通过驱动伺服电机四来带动转动平台进行旋转,从而带动转动平台上所有的部件进行旋转,从而通过改变物件的位置进行旋转,这样就能丰富物件旋转方式的多样性,使得机器手能够根据需要来进行不同的操作来精准地实现不同的要求。
技术特征:
1.一种搬运时实现换向的桁架机械手,包括支撑架(1),所述支撑架(1)顶部两侧都固定安装有导轨(2),所述导轨(2)顶部都滑动连接有滑块(3),所述滑块(3)顶部固定安装有滑动杆(4),所述滑动杆(4)正面固定安装有滑轨(5),所述滑轨(5)外壁滑动连接有移动块(6);
2.根据权利要求1所述的一种搬运时实现换向的桁架机械手,其特征在于,所述制动装置包括:伺服电机一(8)、丝杆一(9);
3.根据权利要求2所述的一种搬运时实现换向的桁架机械手,其特征在于,所述制动装置还包括:伺服电机二(10)、丝杆二(11);
4.根据权利要求1所述的一种搬运时实现换向的桁架机械手,其特征在于,所述转向装置包括:伺服电机四(15)、转动平台(16)、四个伺服马达(17);
5.根据权利要求4所述的一种搬运时实现换向的桁架机械手,其特征在于,所述伺服马达(17)底部固定安装有双向电动伸缩杆(18),所述双向电动伸缩杆(18)两侧输出端都固定安装有夹块(19),所述伺服电机四(15)顶部与所述升降杆(7)顶部固定连接。
6.根据权利要求5所述的一种搬运时实现换向的桁架机械手,其特征在于,所述移动块(6)正面固定安装有伺服电机三(12),所述升降杆(7)靠近所述伺服电机三(12)的那一侧开设有齿条(14),所述伺服电机三(12)输出端与所述移动块(6)内壁转动连接。
7.根据权利要求6所述的一种搬运时实现换向的桁架机械手,其特征在于,所述伺服电机三(12)输出端固定安装有齿轮(13),所述齿轮(13)与所述齿条(14)相互啮合。
技术总结
本技术公开了一种搬运时实现换向的桁架机械手,其技术方案是:包括撑架,所述支撑架顶部两侧都固定安装有导轨,所述导轨顶部都滑动连接有滑块,所述滑块顶部固定安装有滑动杆,所述滑动杆正面固定安装有滑轨,所述滑轨外壁滑动连接有移动块,所述移动块内壁滑动连接有升降杆,所述支撑架外壁与所述滑动杆外壁都固定安装有制动装置,所述制动装置用于带动滑动杆与移动块进行移动,所述升降杆底部安装转向装置,所述转向装置用于带动物料进行转向,涉及桁架机械手技术领域,本技术有益效果为:能丰富物件旋转方式的多样性,使得机器手能够根据需要来进行不同的操作来精准地实现不同的要求。
技术研发人员:王志胜,吴丽芳,蒋情厂,赵清,张宇
受保护的技术使用者:南京夸特机电科技有限公司
技术研发日:20230526
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!