一种多自由度高适应性机器人单腿测试台
本技术涉及机器人,尤其是涉及一种多自由度高适应性机器人单腿测试台。
背景技术:
1、随着机器人技术的发展,足式机器人的研究热点也逐渐从低速静步态运动转向高速动步态运动,如奔跑运动。足式机器人在高速奔跑时,腿部运动速度增加,落地冲击也剧烈增加,因此对单腿性能提出了更高的要求。足式机器人单腿性能的好坏直接关系到机器人整体性能的优劣,进而影响足式机器人作业的效率及安全性,因此需要对单腿性能进行测试。目前采用的测试方法是将单腿直接装在机器人整体上进行。这种方式虽然可以反应实际运行工况,但测试阶段已处在机器人研发的大后期,不仅测试验证的周期长,而且成本高,不利于机器人整机性能的控制。
技术实现思路
1、本实用新型的目的是针对现有技术存在的不足,提供一种能够缩短测试验证周期,成本低,有利于机器人整机性能控制的多自由度高适应性机器人单腿测试台。
2、为实现上述目的,本实用新型多自由度高适应性机器人单腿测试台采用的技术方案是:
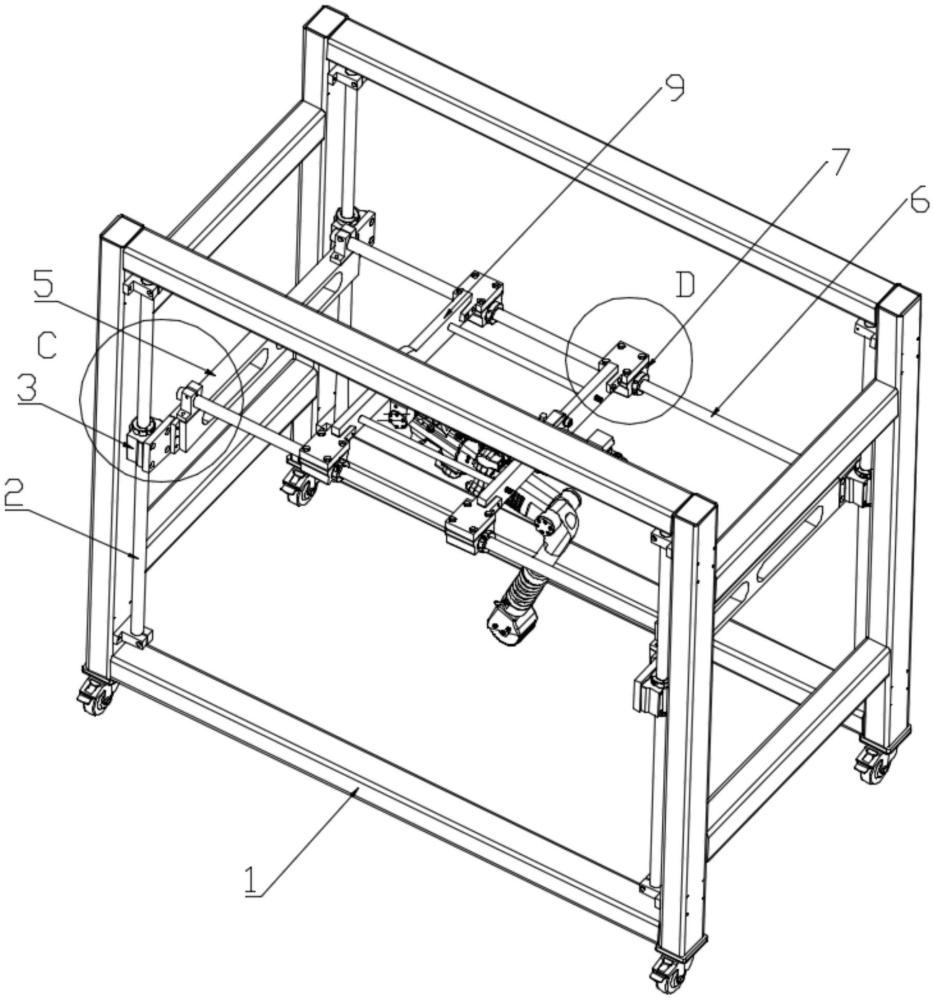
3、一种多自由度高适应性机器人单腿测试台,包括框架,框架的两侧设置有竖滑轨,竖滑轨滑动连接有第一滑块,第一滑块的两侧设置有第一卡环,第一卡环与竖滑轨可拆卸连接,用于固定第一滑块,第一滑块固接有活动横梁,两侧的活动横梁之间设置有横滑轨,横滑轨滑动连接有第二滑块,第二滑块的两侧设置有第二卡环,第二卡环与横滑轨可拆卸连接,用于固定第二滑块,第二滑块固接有用于安装单腿的夹具。
4、优选的,所述夹具包括用于安装单腿的第一安装板和第二安装板,第一、第二安装板的两端设置有与第一滑块固接的连接板。
5、优选的,所述第一安装板和第二安装板之间设置有若干个撑杆,撑杆将第一、第二安装板连接为一个整体。
6、优选的,所述活动横梁设置有用于固接横滑轨的第一开口支座,框架设置有用于固接竖滑轨的第二开口支座。
7、优选的,所述框架包括处在四个拐角的立柱,相邻的立柱之间通过若干个横梁连接。
8、优选的,所述立柱底部设置有万向轮。
9、本实用新型与现有技术相比,具有以下优点:
10、1、将单腿安装在夹具上,通过第二滑块在横滑轨上调整到适当位置,并使用第二卡环锁紧,通过第一滑块上下移动单腿,使得单腿处于不同的高度,模拟单腿腾空运动和触地运动,还可以拆除第一滑块上侧的第一锁环,让单腿模拟弹跳,无需将单腿装到机器人整机上进行测试,缩短了测试验证周期,成本低,有利于机器人整机性能控制。
11、2、不同的单腿可选用不同的夹具,通用性高。
12、3、提供万向轮,提高框架的机动性,方便更换不同的测试场景。
技术特征:
1.一种多自由度高适应性机器人单腿测试台,其特征在于:包括框架,框架的两侧设置有竖滑轨,竖滑轨滑动连接有第一滑块,第一滑块的两侧设置有第一卡环,第一卡环与竖滑轨可拆卸连接,用于固定第一滑块,第一滑块固接有活动横梁,两侧的活动横梁之间设置有横滑轨,横滑轨滑动连接有第二滑块,第二滑块的两侧设置有第二卡环,第二卡环与横滑轨可拆卸连接,用于固定第二滑块,第二滑块固接有用于安装单腿的夹具。
2.根据权利要求1所述的多自由度高适应性机器人单腿测试台,其特征在于:所述夹具包括用于安装单腿的第一安装板和第二安装板,第一、第二安装板的两端设置有与第一滑块固接的连接板。
3.根据权利要求2所述的多自由度高适应性机器人单腿测试台,其特征在于:所述第一安装板和第二安装板之间设置有若干个撑杆,撑杆将第一、第二安装板连接为一个整体。
4.根据权利要求1所述的多自由度高适应性机器人单腿测试台,其特征在于:所述活动横梁设置有用于固接横滑轨的第一开口支座,框架设置有用于固接竖滑轨的第二开口支座。
5.根据权利要求1所述的多自由度高适应性机器人单腿测试台,其特征在于:所述框架包括处在四个拐角的立柱,相邻的立柱之间通过若干个横梁连接。
6.根据权利要求5所述的多自由度高适应性机器人单腿测试台,其特征在于:所述立柱底部设置有万向轮。
技术总结
本技术公开了一种多自由度高适应性机器人单腿测试台。该多自由度高适应性机器人单腿测试台包括框架,框架的两侧设置有竖滑轨,竖滑轨滑动连接有第一滑块,第一滑块的两侧设置有第一卡环,第一卡环与竖滑轨可拆卸连接,用于固定第一滑块,第一滑块固接有活动横梁,两侧的活动横梁之间设置有横滑轨,横滑轨滑动连接有第二滑块,第二滑块的两侧设置有第二卡环,第二卡环与横滑轨可拆卸连接,用于固定第二滑块,第二滑块固接有用于安装单腿的夹具。本技术解决了现有技术不仅测试验证的周期长,而且成本高,不利于机器人整机性能控制的问题。
技术研发人员:袁立鹏,赵慧,潘刚,宫赤坤,方鸿磊,曹潜,杨坤,杨进,许安定,杨宇航,李龙坤
受保护的技术使用者:哈尔滨工业大学
技术研发日:20230530
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!