一种快速定位的机械手的制作方法
本技术涉及机械设备,尤其是涉及一种快速定位的机械手。
背景技术:
1、目前,随着科技的发展,越来越多产业需要全自动化生产,一般全自动生产线均会采用机械手作为上料机构,从而将产品原料上料至生产线中进行生产,然而上料机械手一般是固定在一条生产线上,若应用至另一条生产线中,则需要重新进行调试,影响生产效率。
技术实现思路
1、本实用新型的主要目的在于提供一种快速定位的机械手,以解决上述技术问题,当更换产线时无需进行调试。
2、为实现上述目的,本实用新型采用如下技术方案:
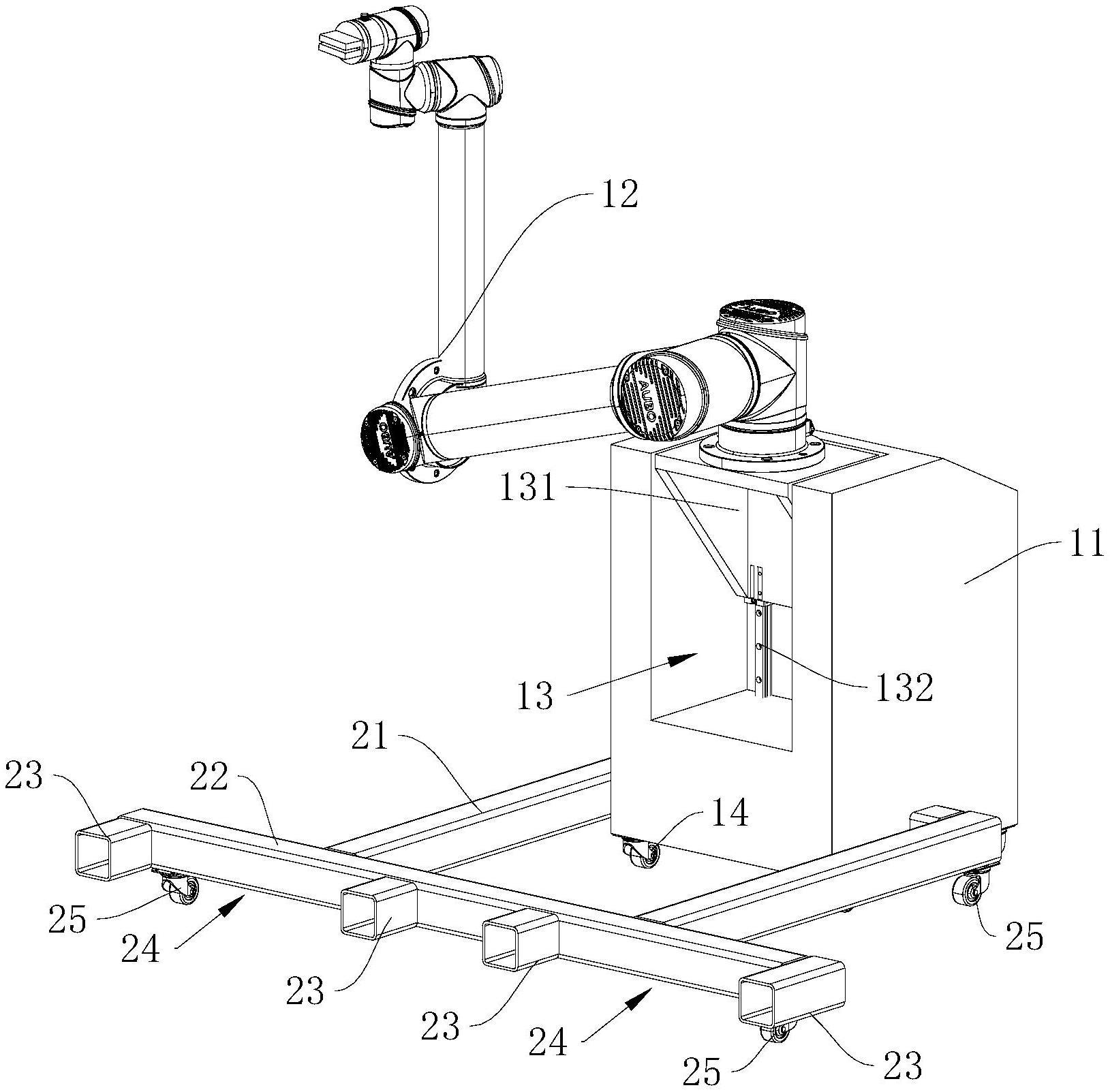
3、一种快速定位的机械手,包括有机械手结构和固定架,所述固定架固设于所述机械手结构上,所述固定架包括有延伸架和定位架,所述定位架通过所述延伸架与所述机械手结构形成相对固定,所述定位架上设置有限位结构,两个相邻的限位结构形成放置槽,所述放置槽的开口朝向远离所述机械手结构的方向。
4、作为一种优选的技术方案,所述机械手结构包括有机械手和安装座,所述机械手安装于所述安装座上,所述机械手为柔性六轴机械手。
5、作为一种优选的技术方案,所述机械手结构还包括有升降组件,所述升降组件安装于所述安装座上,所述升降组件驱动机械手移动。
6、作为一种优选的技术方案,所述升降组件包括有升降座、驱动单元和升降导轨,所述升降导轨固设于所述安装座上,所述驱动单元驱动所述升降座沿所述升降导轨移动。
7、作为一种优选的技术方案,所述驱动单元包括有电机、滑块、丝杆、螺母和连接块,所述滑块和所述连接块与所述升降座固设,且所述滑块沿所述升降导轨移动,所述螺母与所述丝杆啮合,所述螺母与所述连接块固设,所述电机驱动所述丝杆旋转。
8、作为一种优选的技术方案,所述固定架和所述机械手结构上还包括有滚轮,所述滚轮安装于所述固定架和所述机械手结构的底部。
9、本实用新型的有益效果在于:上述快速定位的机械手,通过设置固定架,将物料架放置于固定架中,使机械手结构与物料架的相对位置不发生改变,当机械手结构更换产线后,无需对机械手结构的上下料的位置进行调试,从而实现快速适应不同的产线环境,提高自动化生产线的工作效率。
技术特征:
1.一种快速定位的机械手,其特征在于,包括有机械手结构和固定架,所述固定架固设于所述机械手结构上,所述固定架包括有延伸架和定位架,所述定位架通过所述延伸架与所述机械手结构形成相对固定,所述定位架上设置有限位结构,两个相邻的限位结构形成放置槽,所述放置槽的开口朝向远离所述机械手结构的方向。
2.根据权利要求1所述的快速定位的机械手,其特征在于,所述机械手结构包括有机械手和安装座,所述机械手安装于所述安装座上,所述机械手为柔性六轴机械手。
3.根据权利要求2所述的快速定位的机械手,其特征在于,所述机械手结构还包括有升降组件,所述升降组件安装于所述安装座上,所述升降组件驱动机械手移动。
4.根据权利要求3所述的快速定位的机械手,其特征在于,所述升降组件包括有升降座、驱动单元和升降导轨,所述升降导轨固设于所述安装座上,所述驱动单元驱动所述升降座沿所述升降导轨移动。
5.根据权利要求4所述的快速定位的机械手,其特征在于,所述驱动单元包括有电机、滑块、丝杆、螺母和连接块,所述滑块和所述连接块与所述升降座固设,且所述滑块沿所述升降导轨移动,所述螺母与所述丝杆啮合,所述螺母与所述连接块固设,所述电机驱动所述丝杆旋转。
6.根据权利要求5所述的快速定位的机械手,其特征在于,所述固定架和所述机械手结构上还包括有滚轮,所述滚轮安装于所述固定架和所述机械手结构的底部。
技术总结
本技术涉及一种快速定位的机械手,包括有机械手结构和固定架,所述固定架固设于所述机械手结构上,所述固定架包括有延伸架和定位架,所述定位架通过所述延伸架与所述机械手结构形成相对固定,所述定位架上设置有限位结构,两个相邻的限位结构形成放置槽,所述放置槽的开口朝向远离所述机械手结构的方向。上述快速定位的机械手,通过设置固定架,将物料架放置于固定架中,使机械手结构与物料架的相对位置不发生改变,当机械手结构更换产线后,无需对机械手结构的上下料的位置进行调试,从而实现快速适应不同的产线环境,提高自动化生产线的工作效率。
技术研发人员:黄明星
受保护的技术使用者:东莞市亮宇自动化科技有限公司
技术研发日:20230530
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!