一种用于地铁车辆接触网用检修机器人
本技术涉及检修机器人,具体为一种用于地铁车辆接触网用检修机器人。
背景技术:
1、接触网是在电气化铁道中,沿钢轨上空之字形架设的,供受电弓取流的高压输电线,接触网是铁路电气化工程的主构架,是沿铁路线上空架设的向电力机车供电的特殊形式的输电线路,其由接触悬挂、支持装置、定位装置、支柱与基础几部分组成,为了避免日常使用和风吹日晒导致接触网损害,从而影响轨道交通的使用,因此需要定期的对接触网进行巡检,从而及时发现问题和解决问题。
2、根据公开号cn214607177u的专利提出的一种城市轨道交通接触网状态巡检车,该城市轨道交通接触网状态巡检车,通过转杆、滚轮、摄像头、型号模块和信号器等结构的组合,使得滚轮转动可以带动装置进行移动,通过摄像头对接触网进行拍摄,由于摄像头拍摄比人眼观测更加快速和精准,且滚轮滚动使得装置行走的速度远远大于人行走的速度,从而可以快速对状态网进行巡检,从而可以及时发现问题以及解决问题,避免接触网出现问题影响轨道交通运行,通过上述结构的组合解决了人工巡检无法快速完成巡检任务的问题,但是该城市轨道交通接触网状态巡检车,在行走时遇到障碍物时,由于轨道底部狭窄,无法绕行,会一直顶着障碍物进行移动,故而提出一种用于地铁车辆接触网用检修机器人来解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种用于地铁车辆接触网用检修机器人,具备将障碍物拨开的优点,解决了该城市轨道交通接触网状态巡检车,在行走时遇到障碍物时,由于轨道底部狭窄,无法绕行,会一直顶着障碍物进行移动的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于地铁车辆接触网用检修机器人,包括检修机器人本体,所述检修机器人本体的外部设置有拨动机构,所述检修机器人本体的上方设置有检修机构;
3、所述拨动机构包括有两个外壳,两个所述外壳的相对一侧分别与检修机器人本体的左右两侧固定连接,两个所述外壳的内底壁均固定安装有电机,两个所述电机的输出轴均通过联轴器固定连接有两个转动轴,四个所述转动轴的外表面均固定安装有竖直锥齿轮,两个所述外壳的内部均转动安装有两个一端贯穿并延伸至其外部的转动杆,四个所述转动杆的外表面均固定安装有横置锥齿轮,四个所述横置锥齿轮的外表面分别与四个竖直锥齿轮的外表面相啮合,四个所述转动杆的外表面均固定安装有拨杆。
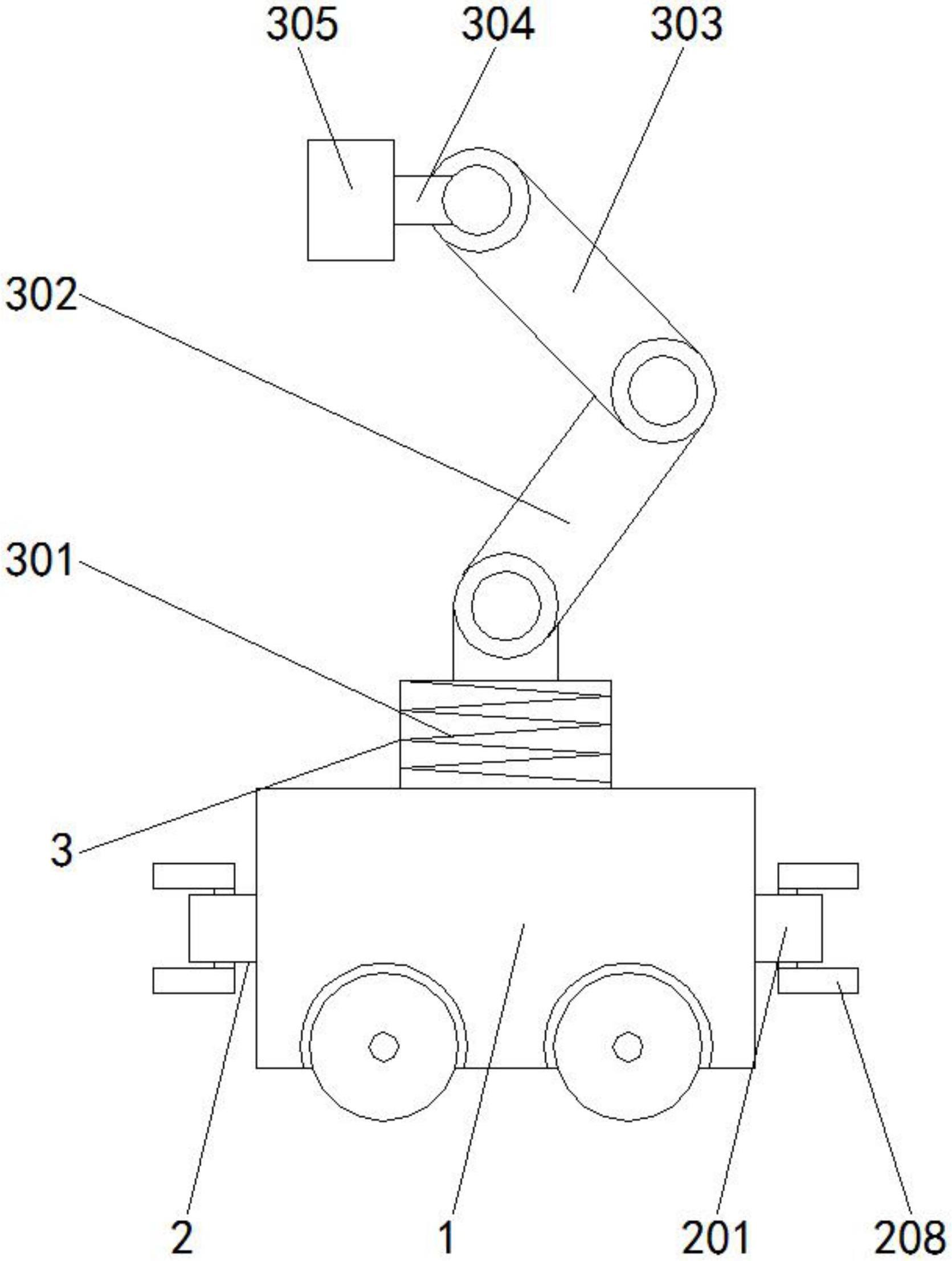
4、进一步,所述检修机构包括有旋转台,所述旋转台的内部转动安装有一端贯穿并延伸至其外部的第一动力臂,所述第一动力臂的内部转动安装有一端贯穿并延伸至其外部的第二动力臂,所述第二动力臂的内部转动安装有一端贯穿并延伸至其外部的第三动力臂,所述第三动力臂的左侧固定安装有摄像头。
5、进一步,所述外壳的内底壁固定安装有稳定块,所述稳定块的内表面与转动轴的外表面转动连接。
6、进一步,所述外壳的顶部开设有活动孔,所述活动孔的内表面与转动杆的外表面转动连接。
7、进一步,四个所述拨杆的相对一侧均开设有斜面,四个所述拨杆从上往下看呈左右两侧对称分布。
8、进一步,所述摄像头的内部搭载了线扫激光、高清视觉镜头和红外热成像仪。
9、进一步,所述检修机器人本体为智能巡检机器人铁宝。
10、与现有技术相比,本申请的技术方案具备以下有益效果:
11、该用于地铁车辆接触网用检修机器人,通过设置有拨动机构,达到了将障碍物拨开的目的,防止障碍物对检修机器人的行走造成影响,方便了使用者的使用,通过设置有检修机构,起到对地铁车辆接触网进行检修的作用,更好地保障了巡检质量,为地铁安全出行保驾护航。
技术特征:
1.一种用于地铁车辆接触网用检修机器人,包括检修机器人本体(1),其特征在于:所述检修机器人本体(1)的外部设置有拨动机构(2),所述检修机器人本体(1)的上方设置有检修机构(3);
2.根据权利要求1所述的一种用于地铁车辆接触网用检修机器人,其特征在于:所述检修机构(3)包括有旋转台(301),所述旋转台(301)的内部转动安装有一端贯穿并延伸至其外部的第一动力臂(302),所述第一动力臂(302)的内部转动安装有一端贯穿并延伸至其外部的第二动力臂(303),所述第二动力臂(303)的内部转动安装有一端贯穿并延伸至其外部的第三动力臂(304),所述第三动力臂(304)的左侧固定安装有摄像头(305)。
3.根据权利要求1所述的一种用于地铁车辆接触网用检修机器人,其特征在于:所述外壳(201)的内底壁固定安装有稳定块(207),所述稳定块(207)的内表面与转动轴(203)的外表面转动连接。
4.根据权利要求1所述的一种用于地铁车辆接触网用检修机器人,其特征在于:所述外壳(201)的顶部开设有活动孔,所述活动孔的内表面与转动杆(205)的外表面转动连接。
5.根据权利要求1所述的一种用于地铁车辆接触网用检修机器人,其特征在于:四个所述拨杆(208)的相对一侧均开设有斜面,四个所述拨杆(208)从上往下看呈左右两侧对称分布。
6.根据权利要求2所述的一种用于地铁车辆接触网用检修机器人,其特征在于:所述摄像头(305)的内部搭载了线扫激光、高清视觉镜头和红外热成像仪。
7.根据权利要求1所述的一种用于地铁车辆接触网用检修机器人,其特征在于:所述检修机器人本体(1)为智能巡检机器人铁宝。
技术总结
本技术涉及一种用于地铁车辆接触网用检修机器人,包括检修机器人本体,所述检修机器人本体的外部设置有拨动机构,所述检修机器人本体的上方设置有检修机构,所述拨动机构包括有两个外壳,两个所述外壳的相对一侧分别与检修机器人本体的左右两侧固定连接,两个所述外壳的内底壁均固定安装有电机,两个所述电机的输出轴均通过联轴器固定连接有两个转动轴,四个所述转动轴的外表面均固定安装有竖直锥齿轮,两个所述外壳的内部均转动安装有两个一端贯穿并延伸至其外部的转动杆。该用于地铁车辆接触网用检修机器人,通过设置有拨动机构,达到了将障碍物拨开的目的,防止障碍物对检修机器人的行走造成影响,方便使用者的使用。
技术研发人员:郑锂
受保护的技术使用者:贵州交通职业技术学院
技术研发日:20230601
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!