一种防爆复合协作机器人底盘防碰撞机构的制作方法
本技术涉及机器人,尤其涉及一种防爆复合协作机器人底盘防碰撞机构。
背景技术:
1、巡检机器人一般在无人工厂里面使用,巡检机器人上设置有摄像头,人们可以通过遥控的方式控制机器人代人巡检,节省了劳动力,现有的巡检机器人上一般未设置有具备缓冲作用的防撞机构,若是人工操作不当可能会误撞到障碍物,如此可能导致机器人外壳损毁。
技术实现思路
1、本实用新型的目的在于:为了解决上述问题,而提出的一种防爆复合协作机器人底盘防碰撞机构。
2、为了实现上述目的,本实用新型采用了如下技术方案:
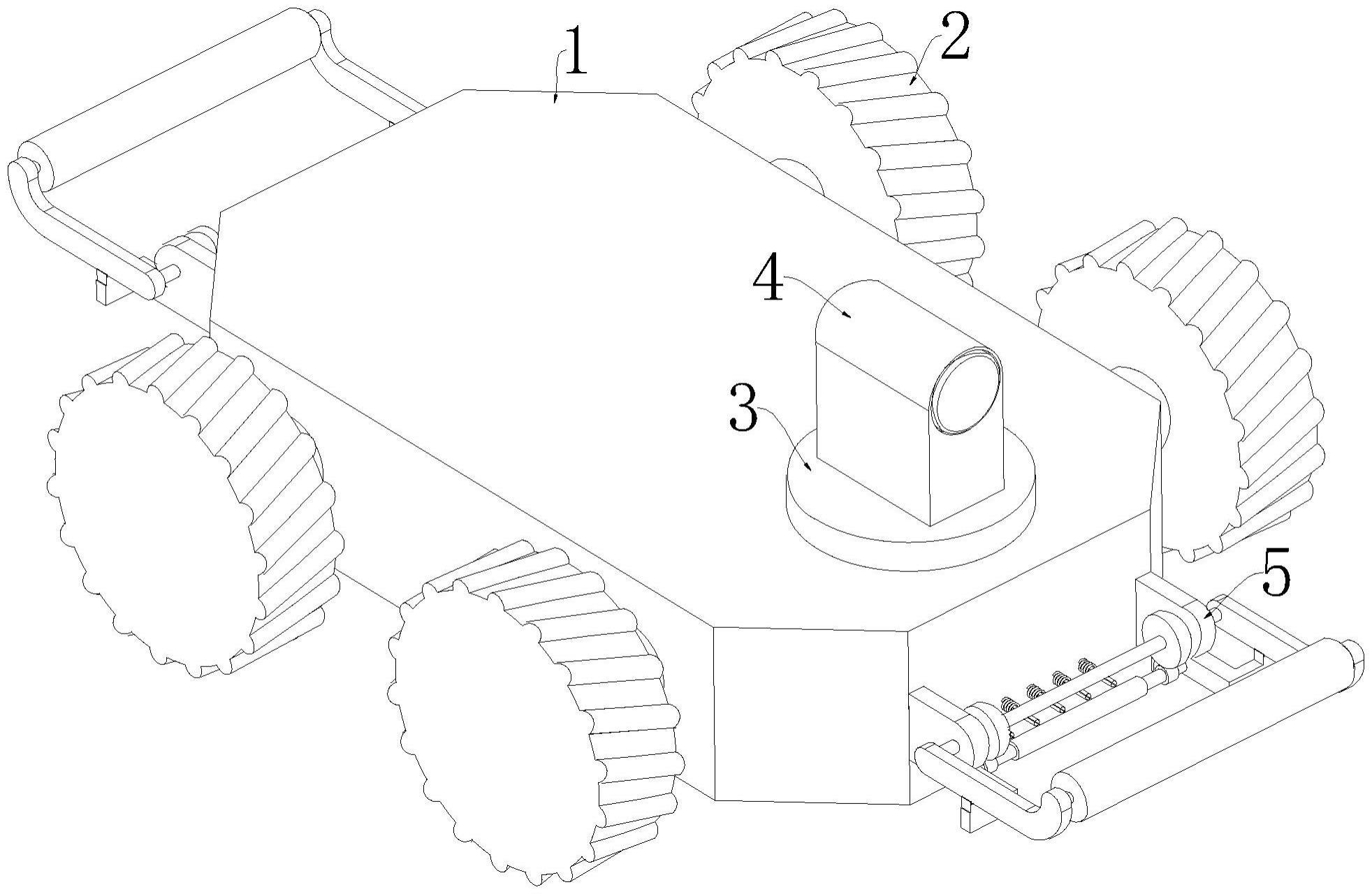
3、一种防爆复合协作机器人底盘防碰撞机构,包括机械本体,所述机械本体的两侧均设置有移动轮,所述机械本体的上端面设置有传动盘,所述传动盘的上端面设置有摄像头,所述机械本体的前后来两端均设置有限位座,所述限位座之间设置有第一转轴,所述第一转轴的两端均设置有传动板,所述机械本体上设置有缓冲机构。
4、优选地,所述传动板之间设置有限位辊。
5、优选地,所述缓冲机构包括设置在所述机械本体侧面的多个限位杆,是限位杆的外侧设置有弹簧,所述弹簧和所述第一转轴之间设置卷集组件。
6、优选地,所述卷集组件包括转动设置在所述限位座之间的第二转轴,所述第二转轴上设置有卷集辊,所述卷集辊和所述弹簧之间设置有收纳绳,所述第一转轴和所述第二转轴之间设置有传动组件。
7、优选地,所述传动组件包括设置在所述第一转轴上的第一齿轮,所述第二转轴上设置有第二齿轮,所述第一齿轮和所述第二齿轮啮合连接。
8、优选地,所述限位座的侧面设置有限位凸起,所述限位凸起上设置有支撑座。
9、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
10、本申请中当机械本体撞上阻挡物时,在冲击力的作用下,传动板沿着第一转轴转动,第一转轴带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮带动卷集辊转动,卷集辊通过收纳绳拉动弹簧,如此可以起到缓冲作用,防止机械本体受到伤害。
技术特征:
1.一种防爆复合协作机器人底盘防碰撞机构,包括机械本体(1),所述机械本体(1)的两侧均设置有移动轮(2),所述机械本体(1)的上端面设置有传动盘(3),所述传动盘(3)的上端面设置有摄像头(4),其特征在于,所述机械本体(1)的前后两端均设置有限位座(5),所述限位座(5)之间设置有第一转轴(6),所述第一转轴(6)的两端均设置有传动板(7),所述机械本体(1)上设置有缓冲机构。
2.根据权利要求1所述的一种防爆复合协作机器人底盘防碰撞机构,其特征在于,所述传动板(7)之间设置有限位辊(8)。
3.根据权利要求2所述的一种防爆复合协作机器人底盘防碰撞机构,其特征在于,所述缓冲机构包括设置在所述机械本体(1)侧面的多个限位杆(13),是限位杆(13)的外侧设置有弹簧(14),所述弹簧(14)和所述第一转轴(6)之间设置卷集组件。
4.根据权利要求3所述的一种防爆复合协作机器人底盘防碰撞机构,其特征在于,所述卷集组件包括转动设置在所述限位座(5)之间的第二转轴(10),所述第二转轴(10)上设置有卷集辊(12),所述卷集辊(12)和所述弹簧(14)之间设置有收纳绳(15),所述第一转轴(6)和所述第二转轴(10)之间设置有传动组件。
5.根据权利要求4所述的一种防爆复合协作机器人底盘防碰撞机构,其特征在于,所述传动组件包括设置在所述第一转轴(6)上的第一齿轮(9),所述第二转轴(10)上设置有第二齿轮(11),所述第一齿轮(9)和所述第二齿轮(11)啮合连接。
6.根据权利要求5所述的一种防爆复合协作机器人底盘防碰撞机构,其特征在于,所述限位座(5)的侧面设置有限位凸起(16),所述限位凸起(16)上设置有支撑座(17)。
技术总结
本技术公开了一种防爆复合协作机器人底盘防碰撞机构,包括机械本体,所述机械本体的两侧均设置有移动轮,所述机械本体的上端面设置有传动盘,所述传动盘的上端面设置有摄像头,所述机械本体的前后两端均设置有限位座,所述限位座之间设置有第一转轴,所述第一转轴的两端均设置有传动板,所述机械本体上设置有缓冲机构。本申请中当机械本体撞上阻挡物时,在冲击力的作用下,传动板沿着第一转轴转动,第一转轴带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮带动卷集辊转动,卷集辊通过收纳绳拉动弹簧,如此可以起到缓冲作用,防止机械本体受到伤害。
技术研发人员:郭书洋,田川,刘艺,杜薇,于静静
受保护的技术使用者:遨博(大连)机器人有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!