一种机械手臂重复定点运动精度数据采集装置的制作方法
本技术涉及机械手臂运动精度调节,具体为一种机械手臂重复定点运动精度数据采集装置。
背景技术:
1、由于机械手臂的运动精度无法用肉眼直接观察得到;传统的ccd测试平台是将机械手臂筒身固定,而后使机械手臂末端重复运动到某几个定点,将其每次运动到其中一个定点的坐标数据采集后进行分析比较,从而得出机械手臂运动精度的优劣结论。这种测试方法无法模拟出实际生产中整个机械手臂的运动轨迹,因而其测试结果的准确性有待进一步改善。
技术实现思路
1、本实用新型的目的在于提供一种机械手臂重复定点运动精度数据采集装置,以解决上述背景技术中提出的问题。
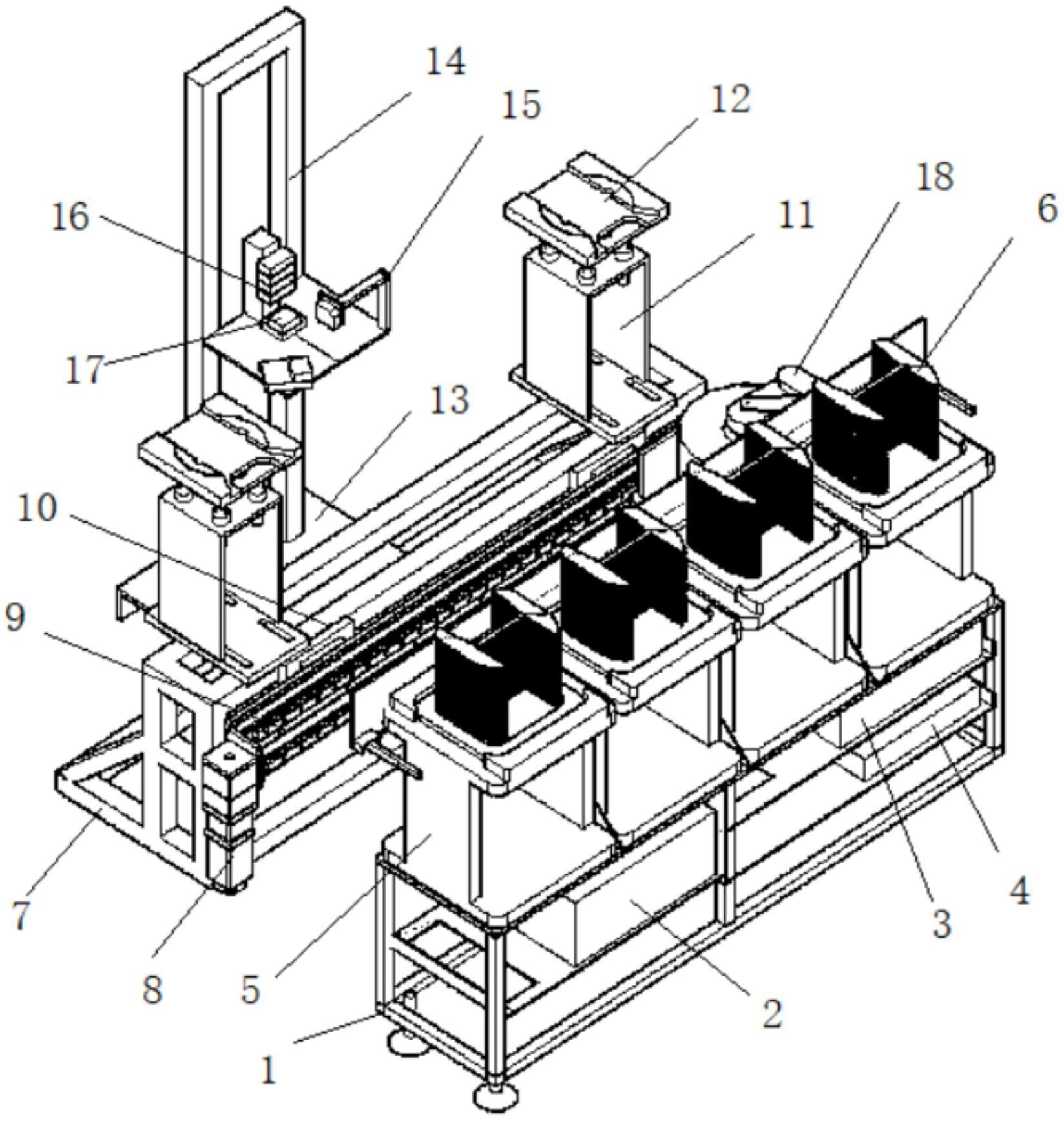
2、为实现上述目的,本实用新型提供如下技术方案:一种机械手臂重复定点运动精度数据采集装置,包括前段支架和后段支架,所述前段支架和后段支架之间前后水平安装在水平面上,所述前段支架内部依次安装有手臂控制器、电源控制器和卡盒升降控制终端,所述前段支架顶部安装有四个晶圆卡盒升降装置,四个所述晶圆卡盒升降装置顶部安装有晶圆卡盒托盘,所述后段支架顶部两端安装有晶圆放置支架,所述晶圆放置支架顶部安装有晶圆放置平台,所述后段支架背面中间设置有安装支架,所述安装支架表面安装有坐标数值显示器和光耦传感器,所述后段支架正面安装有机械手臂运动滑轨,所述机械手臂运动滑轨表面安装有固定架,所述固定架内安装有机械手臂筒身,所述机械手臂筒身顶部输出端安装有机械手臂下臂,所述机械手臂下臂顶部安装有机械手臂上臂,所述机械手臂上臂与机械手臂下臂之间连接有机械手臂末端。
3、优选的,所述前段支架和后段支架之间相距400mm。
4、优选的,所述机械手臂运动滑轨输出端通过滑轨皮带安装有滑轨控制马达。
5、优选的,所述坐标数值显示器设置有三个,且坐标数值显示器上下堆叠放置,所述坐标数值显示器显示光耦传感器检测的数据。
6、优选的,所述光耦传感器设置有三个,且光耦传感器通过光耦传感器支架与安装支架相连接,三个所述光耦传感器分别记录机械手臂末端在垂直方向上的运动及偏移量、机械手臂末端在伸缩方向上的运动及偏移量和机械手臂末端在旋转方向上的运动及偏移量。
7、与现有技术相比,本实用新型的有益效果是:本实用新型在原有的ccd测试平台基础之上,加入了模拟实际生产中整个机械手臂在运动滑轨上的动作、机械手臂末端取/放晶圆到不同位置的动作,从而使机械手臂在ccd测试过程中的动作基本符合实际生产中的运动,由此得出的运动精度测试结果更加贴近实际生产流程的要求,以期使机械手臂达到最佳的运动精度来满足实际生产使用的需求。
技术特征:
1.一种机械手臂重复定点运动精度数据采集装置,包括前段支架(1)和后段支架(7),其特征在于:所述前段支架(1)和后段支架(7)之间前后水平安装在水平面上,所述前段支架(1)内部依次安装有手臂控制器(2)、电源控制器和卡盒升降控制终端(4),所述前段支架(1)顶部安装有四个晶圆卡盒升降装置(5),四个所述晶圆卡盒升降装置(5)顶部安装有晶圆卡盒托盘(6),所述后段支架顶部两端安装有晶圆放置支架(11),所述晶圆放置支架(11)顶部安装有晶圆放置平台(12),所述后段支架背面中间设置有安装支架(14),所述安装支架(14)表面安装有坐标数值显示器(16)和光耦传感器(17),所述后段支架正面安装有机械手臂运动滑轨(10),所述机械手臂运动滑轨(10)表面安装有固定架(22),所述固定架(22)内安装有机械手臂筒身(18),所述机械手臂筒身(18)顶部输出端安装有机械手臂下臂(19),所述机械手臂下臂(19)顶部安装有机械手臂上臂(20),所述机械手臂上臂(20)与机械手臂下臂(19)之间连接有机械手臂末端(21)。
2.根据权利要求1所述的一种机械手臂重复定点运动精度数据采集装置,其特征在于:所述前段支架(1)和后段支架(7)之间相距400mm。
3.根据权利要求1所述的一种机械手臂重复定点运动精度数据采集装置,其特征在于:所述机械手臂运动滑轨(10)输出端通过滑轨皮带(9)安装有滑轨控制马达(8)。
4.根据权利要求1所述的一种机械手臂重复定点运动精度数据采集装置,其特征在于:所述坐标数值显示器(16)设置有三个,且坐标数值显示器(16)上下堆叠放置,所述坐标数值显示器(16)显示光耦传感器(17)检测的数据。
5.根据权利要求1所述的一种机械手臂重复定点运动精度数据采集装置,其特征在于:所述光耦传感器(17)设置有三个,且光耦传感器(17)通过光耦传感器支架(15)与安装支架(14)相连接,三个所述光耦传感器(17)分别记录机械手臂末端(21)在垂直方向上的运动及偏移量、机械手臂末端(21)在伸缩方向上的运动及偏移量和机械手臂末端(21)在旋转方向上的运动及偏移量。
技术总结
本技术涉及机械手臂运动精度调节技术领域,具体为一种机械手臂重复定点运动精度数据采集装置本技术在原有的CCD测试平台基础之上,加入了模拟实际生产中整个机械手臂在运动滑轨上的动作、机械手臂末端取/放晶圆到不同位置的动作,从而使机械手臂在CCD测试过程中的动作基本符合实际生产中的运动,由此得出的运动精度测试结果更加贴近实际生产流程的要求,以期使机械手臂达到最佳的运动精度来满足实际生产使用的需求。
技术研发人员:吴中,周全,邱正利,毛世成
受保护的技术使用者:亦亨电子(上海)有限公司
技术研发日:20230602
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!