电力巡检机器人的制作方法
本公开涉及电力巡检的,具体地,涉及一种电力巡检机器人。
背景技术:
1、电力巡检是指对电力线路及附属设备的运行状态以及对电力线路走廊周边环境状况进行及时和准确的巡视检测,通过排查发现故障点及危及电力安全的潜在隐患,确保输电线路安全可靠运行。
2、一般情况下,输电线路采用的是高空架设的方式,具有减小人为破坏、降低维护成本、减小电力损耗等优点,传统的针对高空架设的输电线路的巡检方式为人工走线巡检,由巡检人员借助辅助工具对输电线路进行近距离巡视,劳动强度大,安全风险高,且对技术技能要求较高。
3、针对上述情况,巡检机器人应运而生,相关技术中,巡检机器人通过滚轮在输电线路上行走,并通过摄像头进行巡视,处理器处理巡视信息,并反馈巡检结果。但由于高空作业受环境因素的影响较大,跨度较长的输电线路在风的作用下会产生晃动,容易导致巡检机器人与输电线路脱离,发生侧翻,而后自高空掉落,存在有较大的安全和经济风险。
技术实现思路
1、本公开的目的是提供一种电力巡检机器人,该电力巡检机器人能够在巡检过程中稳定地沿输电线路移动,以至少部分地解决上述技术问题。
2、为了实现上述目的,本公开提供一种电力巡检机器人,包括:
3、行走支架;
4、滚筒,可转动地连接于所述行走支架,以使得所述行走支架通过所述滚筒能够支撑在输电线路上并能够沿着所述输电线路移动;
5、驱动机构,与所述滚筒驱动连接,用于驱动所述滚筒转动;
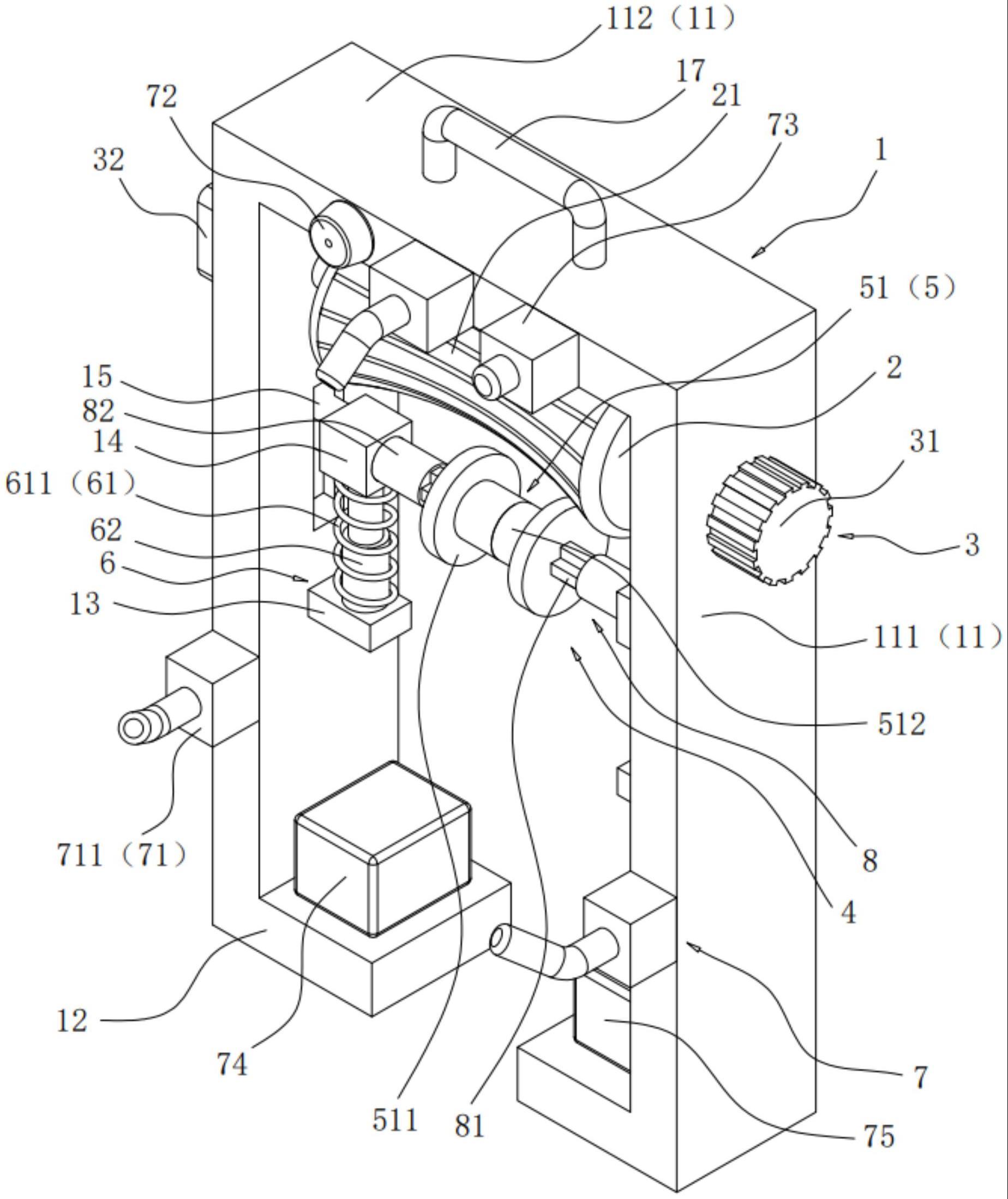
6、辅助固定装置,包括压紧轮和压紧机构,所述压紧机构连接在所述压紧轮和所述行走支架之间,用于驱使所述压紧轮朝向所述滚筒移动,以使得所述输电线路能够夹持在所述压紧轮和所述滚筒之间;以及
7、检测机构,设置在所述行走支架上,用于检测所述输电线路。
8、可选地,所述压紧轮包括两个对接轮,两个所述对接轮各自通过伸缩件连接于所述行走支架,以使得两个所述对接轮能够相互靠近以对接形成所述压紧轮,或者使得两个所述对接轮相互远离,以能够形成间距大于所述输电线路直径的第一间隙,所述压紧机构分别连接于两个所述伸缩件,以间接驱使所述压紧轮朝向所述滚筒移动。
9、可选地,所述对接轮包括限位板和筒体,所述限位板连接于所述伸缩件,所述筒体连接于所述限位板的背离所述伸缩件的一侧且朝向另一所述对接轮延伸,以使得两个所述限位板以及两个所述筒体在两个所述对接轮对接后形成用于容纳所述输电线路的限位槽。
10、可选地,所述伸缩件包括滑动连接的第一连接杆和第二连接杆以及位于所述第一连接杆和所述第二连接杆之间的第一弹性件,所述第一连接杆连接于对应的所述对接轮,所述第二连接杆滑动连接于所述行走支架,以能够朝向或远离所述滚筒移动,所述第一弹性件用于提供所述第一连接杆及对应所述对接轮朝向另一所述对接轮移动的弹力。
11、可选地,所述压紧机构包括第二弹性件,每一所述伸缩件与所述行走支架之间均具有所述第二弹性件,所述第二弹性件用于提供所述伸缩件及所述压紧轮朝向所述滚筒移动的弹力。
12、可选地,所述压紧机构还包括阻尼器,每一所述伸缩件与所述行走支架之间均具有所述阻尼器。
13、可选地,所述第二弹性件构造为第二弹簧,所述第二弹簧套接在对应的所述阻尼器上。
14、可选地,所述驱动机构包括驱动电机,所述驱动电机的输出轴同轴连接于所述滚筒的一端;
15、所述行走支架上设置有位于所述滚筒的远离所述驱动电机的另一端的配重块。
16、可选地,所述检测机构包括设置在行走支架上的摄像模块、拾音器、红外热像仪、供电模块以及控制模块。
17、可选地,所述行走支架包括u形架,所述u形架包括间隔布置的两个第一板体以及连接在两个所述第一板体的同一端之间的第二板体,两个所述第一板体的远离所述第二板体的另一端均具有安装板,两个所述安装板之间具有间距大于所述输电线路直径的第二间隙,所述供电模块和所述控制模块分别设置在两个所述安装板上,所述摄像模块包括摄像头,所述第一板体和所述第二板体各自设置有至少一个所述摄像头。
18、通过上述技术方案,该电力巡检机器人的行走支架通过滚筒与辅助固定装置夹持在输电线路上并能够沿输电线路移动,具体地,行走支架通过滚筒支撑在输电线路上,压紧机构驱使压紧轮朝向滚筒移动,进而使输电线路夹持在压紧轮与滚筒之间,之后通过驱动机构驱动滚筒转动,使得行走支架能够沿输电线路移动,并通过检测组件对输电线路进行检测,通过压紧机构实现压紧轮随输电线路动态地运动,并与滚筒配合夹持输电线路,能够使行走支架稳定地连接于输电线路,从而减小巡检机器人受风力环境影响发生侧翻,与输电线路脱离的可能性。
19、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种电力巡检机器人,其特征在于,包括:
2.根据权利要求1所述的电力巡检机器人,其特征在于,所述压紧轮包括两个对接轮,两个所述对接轮各自通过伸缩件连接于所述行走支架,以使得两个所述对接轮能够相互靠近以对接形成所述压紧轮,或者使得两个所述对接轮相互远离,以能够形成间距大于所述输电线路直径的第一间隙,所述压紧机构分别连接于两个所述伸缩件,以间接驱使所述压紧轮朝向所述滚筒移动。
3.根据权利要求2所述的电力巡检机器人,其特征在于,所述对接轮包括限位板和筒体,所述限位板连接于所述伸缩件,所述筒体连接于所述限位板的背离所述伸缩件的一侧且朝向另一所述对接轮延伸,以使得两个所述限位板以及两个所述筒体在两个所述对接轮对接后形成用于容纳所述输电线路的限位槽。
4.根据权利要求2所述的电力巡检机器人,其特征在于,所述伸缩件包括滑动连接的第一连接杆和第二连接杆以及位于所述第一连接杆和所述第二连接杆之间的第一弹性件,所述第一连接杆连接于对应的所述对接轮,所述第二连接杆滑动连接于所述行走支架,以能够朝向或远离所述滚筒移动,所述第一弹性件用于提供所述第一连接杆及对应所述对接轮朝向另一所述对接轮移动的弹力。
5.根据权利要求2所述的电力巡检机器人,其特征在于,所述压紧机构包括第二弹性件,每一所述伸缩件与所述行走支架之间均具有所述第二弹性件,所述第二弹性件用于提供所述伸缩件及所述压紧轮朝向所述滚筒移动的弹力。
6.根据权利要求5所述的电力巡检机器人,其特征在于,所述压紧机构还包括阻尼器,每一所述伸缩件与所述行走支架之间均具有所述阻尼器。
7.根据权利要求6所述的电力巡检机器人,其特征在于,所述第二弹性件构造为第二弹簧,所述第二弹簧套接在对应的所述阻尼器上。
8.根据权利要求1所述的电力巡检机器人,其特征在于,所述驱动机构包括驱动电机,所述驱动电机的输出轴同轴连接于所述滚筒的一端;
9.根据权利要求1所述的电力巡检机器人,其特征在于,所述检测机构包括设置在行走支架上的摄像模块、拾音器、红外热像仪、供电模块以及控制模块。
10.根据权利要求9所述的电力巡检机器人,其特征在于,所述行走支架包括u形架,所述u形架包括间隔布置的两个第一板体以及连接在两个所述第一板体的同一端之间的第二板体,两个所述第一板体的远离所述第二板体的另一端均具有安装板,两个所述安装板之间具有间距大于所述输电线路直径的第二间隙,所述供电模块和所述控制模块分别设置在两个所述安装板上,所述摄像模块包括摄像头,所述第一板体和所述第二板体各自设置有至少一个所述摄像头。
技术总结
本公开涉及一种电力巡检机器人,该电力巡检机器人包括:行走支架;滚筒,可转动地连接于所述行走支架,以使得所述行走支架通过所述滚筒能够支撑在输电线路上并能够沿着所述输电线路移动;驱动机构,与所述滚筒驱动连接,用于驱动所述滚筒转动;辅助固定装置,包括压紧轮和压紧机构,所述压紧机构连接在所述压紧轮和所述行走支架之间,用于驱使所述压紧轮朝向所述滚筒移动,以使得所述输电线路能够夹持在所述压紧轮和所述滚筒之间;以及检测机构,设置在所述行走支架上,用于检测所述输电线路。通过上述技术方案,能够使巡检机器人稳定地沿输电线路移动,减小巡检机器人受风力环境影响而发生侧翻,与输电线路脱离的可能性。
技术研发人员:陈录,高志刚,赵波,滕志勇,徐树,韩佳安,袁野,魏琨雨,邢鹏,李云江,刘喜军,赵海龙,康吉彪
受保护的技术使用者:国家能源集团内蒙古电力有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!