四轴协作机械手的制作方法
本技术涉及机械手,尤其涉及一种四轴协作机械手。
背景技术:
1、机械手能模仿人手和手臂的某些动作功能,是一种按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、现有技术中至少存在如下问题:一是现有的四轴协作机械手,在较为狭小的空间难以进行工作,降低了生产效率;二是现有的四轴协作机械手,体积都较大,占用空间较大。
技术实现思路
1、本实用新型针对现有技术的不足,研制一种四轴协作机械手,本实用新型能在狭小的空间内进行工作,占用空间较小,有效提高了四轴协作机械手的使用效果,提高了工作效率。
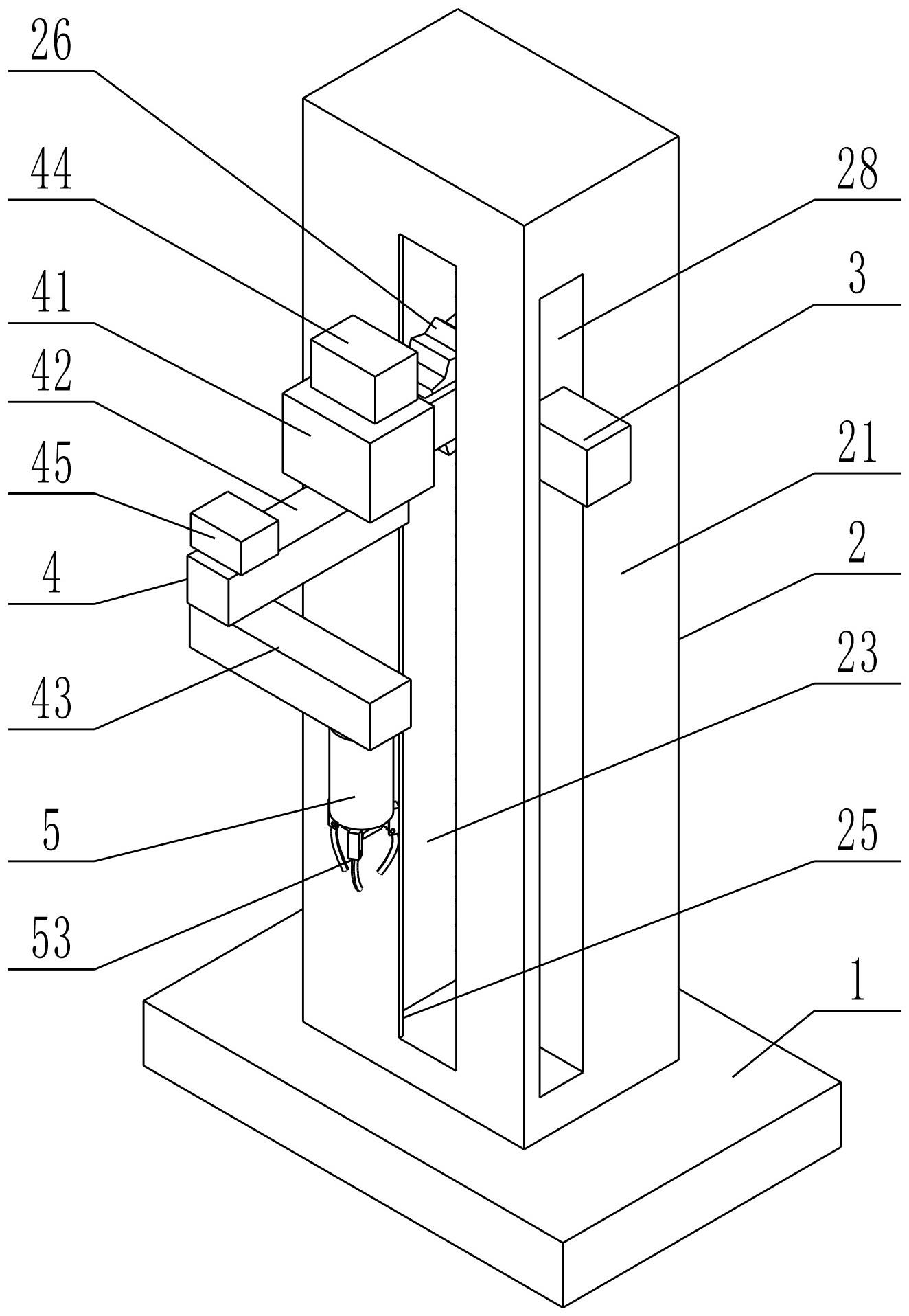
2、本实用新型解决技术问题的技术方案为:一种四轴协作机械手,包括底座,底座上设有升降装置,升降装置包括立柱和升降架,立柱的一侧竖直开设有升降槽,升降槽内竖直设有直齿条,升降槽的两侧壁设有限位滑槽,升降架的内部转动设有齿轮,升降架的两侧设有限位滑板,齿轮与直齿条啮合,齿轮转轴的一端穿过升降架与驱动装置的输出端连接,限位滑板对应设置在限位滑槽内,升降架的外部与机械臂连接,机械臂与机械手连接。
3、作为优化,驱动装置包括散热外壳和驱动电机,驱动电机设置在散热外壳内,驱动电机的输出端穿过外壳与齿轮转轴的一端连接。通过设置散热外壳,能够保护驱动电机并辅助散热;通过设置驱动电机,能够为升降架升降提供动力。
4、作为优化,立柱上设有驱动槽,驱动槽与升降槽连通,驱动装置设置在驱动槽内。通过设置驱动槽,能够容纳驱动装置,不会妨碍驱动装置升降。
5、作为优化,机械臂包括安装架、第一机械臂和第二机械臂,安装架与升降架连接,安装架上设有第一马达,第一马达的输出端与第一机械臂的一端连接,第一机械臂的另一端通过第二马达与第二机械臂的一端连接,第二机械臂的另一端与机械手连接。通过设置安装架,能够使机械臂与升降架连接;通过设置第一机械臂和第一马达,能够使第一机械臂在水平面内旋转摆动,调整机械手的作业位置;通过设置第二机械臂和第二马达,能够使第二机械臂在水平面内旋转摆动,进一步扩大机械手的作业范围,使机械手在第一机械臂的半径范围内也能够作业。
6、作为优化,机械手包括保护壳、设置在保护壳内的伸缩装置和机械爪,保护壳与第二机械臂的另一端连接,伸缩装置的伸缩端与机械爪连接。通过设置保护壳,能够保护伸缩装置;通过设置伸缩装置,能够使机械爪进行升降;通过设置机械爪,能够抓取物品。
7、作为优化,伸缩装置为气缸、电缸、液压缸和圆筒推拉式电磁铁中的任意一种。
8、与现有技术相比,本实用新型具有如下有益效果:
9、通过设置底座,能够将升降装置安装使用,在狭小竖直空间内使用,占用空间面积小;通过设置升降装置,使机械臂和机械手能够竖直升降作业;通过设置升降槽、直齿条和限位滑槽,能够容纳齿轮在直齿条上啮合滚动,带动升降架在升降槽内升降滑动,限位滑板使升降架能够稳定升降滑动,达到内部驱动升降的效果,大大减少空间占用;通过设置驱动装置,能够带动齿轮转动,从而使升降架升降;通过设置机械臂,能够带动机械手移动作业;通过设置机械手,能够抓取物品进行作业。
技术特征:
1.一种四轴协作机械手,包括底座(1),其特征是:底座(1)上设有升降装置(2),升降装置(2)包括立柱(21)和升降架(22),立柱(21)的一侧竖直开设有升降槽(23),升降槽(23)内竖直设有直齿条(24),升降槽(23)的两侧壁设有限位滑槽(25),升降架(22)的内部转动设有齿轮(26),升降架(22)的两侧设有限位滑板(27),齿轮(26)与直齿条(24)啮合,齿轮(26)转轴的一端穿过升降架(22)与驱动装置(3)的输出端连接,限位滑板(27)对应设置在限位滑槽(25)内,升降架(22)的外部与机械臂(4)连接,机械臂(4)与机械手(5)连接。
2.根据权利要求1所述的四轴协作机械手,其特征是:驱动装置(3)包括散热外壳(31)和驱动电机(32),驱动电机(32)设置在散热外壳(31)内,驱动电机(32)的输出端穿过外壳与齿轮(26)转轴的一端连接。
3.根据权利要求2所述的四轴协作机械手,其特征是:立柱(21)上设有驱动槽(28),驱动槽(28)与升降槽(23)连通,驱动装置(3)设置在驱动槽(28)内。
4.根据权利要求1所述的四轴协作机械手,其特征是:机械臂(4)包括安装架(41)、第一机械臂(42)和第二机械臂(43),安装架(41)与升降架(22)连接,安装架(41)上设有第一马达(44),第一马达(44)的输出端与第一机械臂(42)的一端连接,第一机械臂(42)的另一端通过第二马达(45)与第二机械臂(43)的一端连接,第二机械臂(43)的另一端与机械手(5)连接。
5.根据权利要求1-4任一项所述的四轴协作机械手,其特征是:机械手(5)包括保护壳(51)、设置在保护壳(51)内的伸缩装置(52)和机械爪(53),保护壳(51)与第二机械臂(43)的另一端连接,伸缩装置(52)的伸缩端与机械爪(53)连接。
6.根据权利要求5所述的四轴协作机械手,其特征是:伸缩装置(52)为气缸、电缸、液压缸和圆筒推拉式电磁铁中的任意一种。
技术总结
本技术涉及机械手技术领域,公开了一种四轴协作机械手,包括底座,底座上设有升降装置,升降装置包括立柱和升降架,立柱的一侧竖直开设有升降槽,升降槽内竖直设有直齿条,升降槽的两侧壁设有限位滑槽,升降架的内部转动设有齿轮,升降架的两侧设有限位滑板,齿轮与直齿条啮合,齿轮转轴的一端穿过升降架与驱动装置的输出端连接,限位滑板对应设置在限位滑槽内,升降架的外部与机械臂连接,机械臂与机械手连接。本技术能在狭小的空间内进行工作,占用空间较小,有效提高了四轴协作机械手的使用效果,提高了工作效率。
技术研发人员:张波,王志武
受保护的技术使用者:山东东岳化工有限公司
技术研发日:20230607
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!