一种可自动调节抓取力度的伺服驱动抓手的制作方法
本技术涉及驱动抓手领域,尤其涉及一种可自动调节抓取力度的伺服驱动抓手。
背景技术:
1、在现有技术中,已经存在一些伺服驱动抓手的设计,旨在实现自动调节抓取力度。这些抓手通常包括底座、固定座、驱动机构、夹紧机构和夹爪组件。驱动机构通过电机和齿轮传动提供动力,夹紧机构通过导杆、滑块和齿条等结构实现夹紧力的调节,夹爪组件用于抓取物体。
2、现有技术的缺点:
3、固定力度:传统的伺服驱动抓手往往只能提供固定的抓取力度。它们缺乏对不同物体形状、大小和重量的自适应性调节能力,无法适应复杂和多样化的抓取任务。
4、缺乏灵活性:传统的伺服驱动抓手的夹紧力度通常是固定的,无法实时根据抓取过程中的情况进行调整。这可能导致抓取物体时的力度不足或过大,影响抓取的成功率和稳定性。
5、不稳定性:由于传统抓手的夹紧力度固定,当抓取不同形状和大小的物体时,抓手可能无法提供足够的稳定夹持力,导致物体的滑动或掉落。
技术实现思路
1、本实用新型意在提供,以解决现有的问题。
2、为达到上述目的,本实用新型提供如下技术方案:一种可自动调节抓取力度的伺服驱动抓手,包括底座,所述底座为空心座,所述底座的上方固定连接有固定座,所述固定座的内侧设置有电机座,所述电机座上安装有驱动机构,所述固定座的上方开设有调节空腔,所述调节空腔内安装有与驱动机构相连接的夹紧机构,所述夹紧机构的上方安装有夹爪组件,所述夹紧机构上设置有用于调节夹爪组件抓取力度的调节组件。
3、优选的,所述驱动机构包括安装在电机座上的伺服电机,所述伺服电机的输出端上通过转轴连接有驱动齿轮。
4、优选的,所述夹紧机构包括安装在调节空腔内壁的两组平行设置的导杆a和导杆b,所述导杆a和导杆b之间对称设置,所述导杆a和导杆b分别设置有两根。
5、优选的,所述导杆a上滑动设置有两组滑块a,两组所述滑块a的一侧固定连接有齿条a,两组所述滑块a还设置有导块a,所述导块a滑动设置在导杆a上,所述导块a的一侧一体连接有连接座a,所述连接座a的上方与夹爪组件连接。
6、优选的,所述夹爪组件包括通过螺栓固定连接在连接座a上的夹爪a,所述夹爪a上设置有防止夹紧物件掉落的防滑纹路。
7、优选的,所述导杆b上滑动设置有两组滑块b,两组所述滑块b的一侧固定连接有齿条b,两组所述滑块b还设置有导块b,所述导块b滑动设置在导杆b上,所述导块b的一侧一体连接有连接座b,所述连接座b的上方与夹爪组件连接。
8、优选的,所述夹爪组件包括通过螺栓固定连接在连接座b上的夹爪b,所述夹爪b上设置有防止夹紧物件掉落的防滑纹路,所述夹爪a和夹爪b之间相互匹配。
9、优选的,所述齿条a与齿条b设置在驱动齿轮的两侧,且驱动齿轮与齿条a和齿条b之间分别啮合连接。
10、优选的,所述调节空腔的内壁上还设置有起到对连接座a和连接座b导向作用滑杆,所述连接座a和连接座b均滑动设置在滑杆上。
11、优选的,所述调节组件包括套在导杆a以及导杆b上的调节弹簧,调节弹簧用于调节导块a和导块b的夹紧力,且调节弹簧设置在导块a以及导块b的两侧;
12、所述固定座的上方开设有两条长条孔,两条所述长条孔位于两根调节弹簧的正上方,所述长条孔内插接有用于调节弹簧预压力垫片,所述垫片的下端开设有u型槽,所述垫片的u型槽卡在导杆a以及导杆b上。
13、本技术方案与现有技术相比产生的有益效果:
14、调节弹簧套在导杆a和导杆b上,用于调节导块a和导块b的夹紧力。通过调节弹簧的压缩程度,可以控制夹紧力的大小,从而调节抓手对物体的抓取力度。这样可以根据不同的应用需求,对不同大小、重量的物体进行适应性抓取。
15、固定座的上方开设的两条长条孔位于调节弹簧的正上方。长条孔内插接有用于调节弹簧预压力的垫片。垫片的下端开设有u型槽,可以将垫片卡在导杆a和导杆b上。通过调节垫片的位置,可以改变调节弹簧的预压力,从而进一步调节夹紧力的大小和稳定性。
16、调节弹簧和预压力垫片的设置增加了抓取的稳定性。调节弹簧的弹性力提供了对夹紧力的动态调节,使得抓取过程中能够适应不同形状和大小的物体。预压力垫片的调节可以精确控制调节弹簧的预压力,确保夹紧力的稳定性和一致性,从而提高抓取的成功率和可靠性。
技术特征:
1.一种可自动调节抓取力度的伺服驱动抓手,包括底座(1),其特征在于:所述底座(1)为空心座,所述底座(1)的上方固定连接有固定座(2),所述固定座(2)的内侧设置有电机座(3),所述电机座(3)上安装有驱动机构(5),所述固定座(2)的上方开设有调节空腔(4),所述调节空腔(4)内安装有与驱动机构(5)相连接的夹紧机构(6),所述夹紧机构(6)的上方安装有夹爪组件(7),所述夹紧机构(6)上设置有用于调节夹爪组件(7)抓取力度的调节组件(8)。
2.根据权利要求1所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述驱动机构(5)包括安装在电机座(3)上的伺服电机(501),所述伺服电机(501)的输出端上通过转轴连接有驱动齿轮(502)。
3.根据权利要求1所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述夹紧机构(6)包括安装在调节空腔(4)内壁的两组平行设置的导杆a(601)和导杆b(602),所述导杆a(601)和导杆b(602)之间对称设置,所述导杆a(601)和导杆b(602)分别设置有两根。
4.根据权利要求3所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述导杆a(601)上滑动设置有两组滑块a(603),两组所述滑块a(603)的一侧固定连接有齿条a(604),两组所述滑块a(603)还设置有导块a(605),所述导块a(605)滑动设置在导杆a(601)上,所述导块a(605)的一侧一体连接有连接座a(606),所述连接座a(606)的上方与夹爪组件(7)连接。
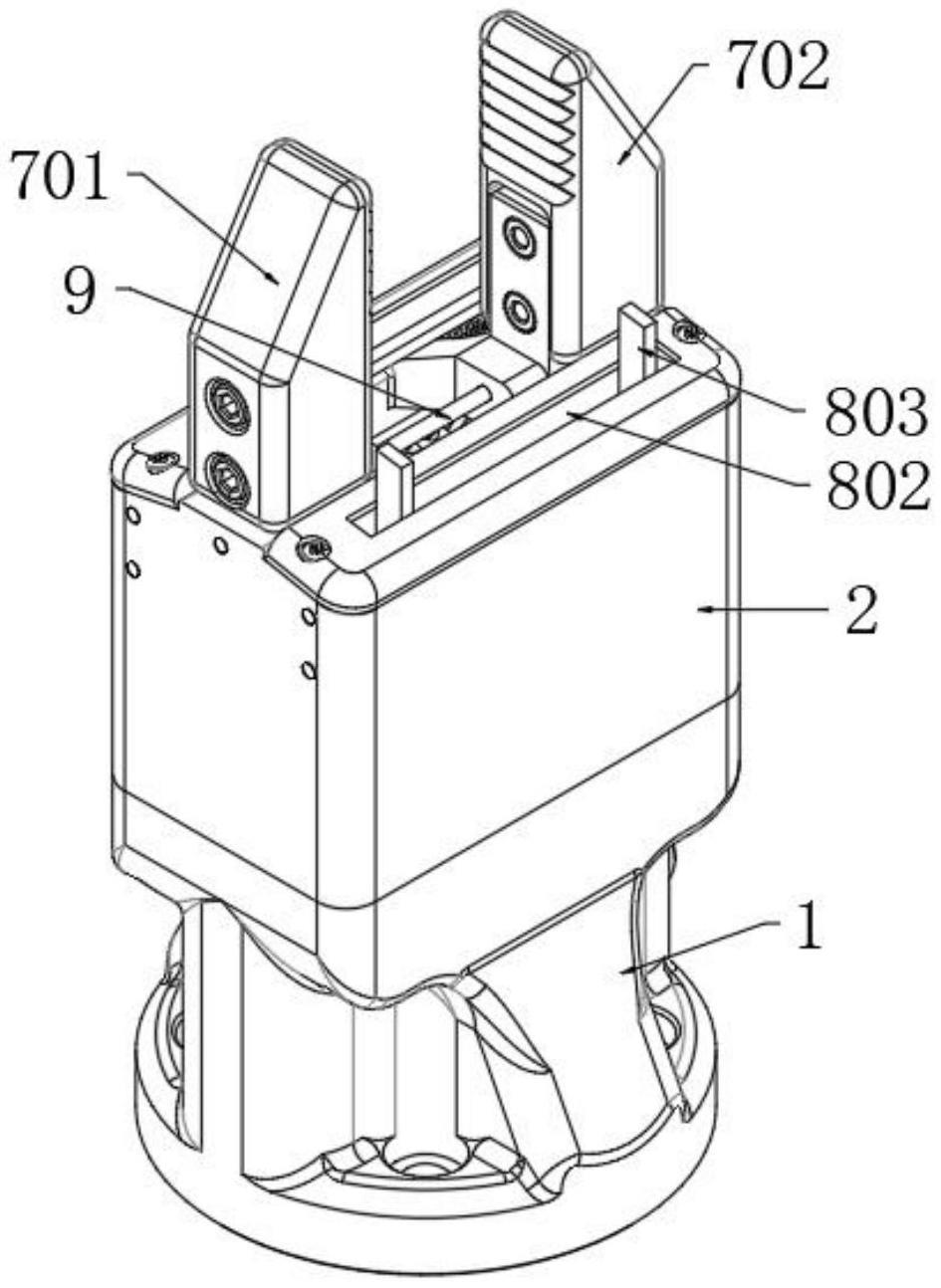
5.根据权利要求4所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述夹爪组件(7)包括通过螺栓固定连接在连接座a(606)上的夹爪a(701),所述夹爪a(701)上设置有防止夹紧物件掉落的防滑纹路。
6.根据权利要求3所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述导杆b(602)上滑动设置有两组滑块b(607),两组所述滑块b(607)的一侧固定连接有齿条b(608),两组所述滑块b(607)还设置有导块b(609),所述导块b(609)滑动设置在导杆b(602)上,所述导块b(609)的一侧一体连接有连接座b(610),所述连接座b(610)的上方与夹爪组件(7)连接。
7.根据权利要求6所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述夹爪组件(7)包括通过螺栓固定连接在连接座b(610)上的夹爪b(702),所述夹爪b(702)上设置有防止夹紧物件掉落的防滑纹路,所述夹爪a(701)和夹爪b(702)之间相互匹配。
8.根据权利要求7所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述齿条a(604)与齿条b(608)设置在驱动齿轮(502)的两侧,且驱动齿轮(502)与齿条a(604)和齿条b(608)之间分别啮合连接。
9.根据权利要求8所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述调节空腔(4)的内壁上还设置有起到对连接座a(606)和连接座b(610)导向作用滑杆(9),所述连接座a(606)和连接座b(610)均滑动设置在滑杆(9)上。
10.根据权利要求9所述的一种可自动调节抓取力度的伺服驱动抓手,其特征在于:所述调节组件(8)包括套在导杆a(601)以及导杆b(602)上的调节弹簧(801),调节弹簧(801)用于调节导块a(605)和导块b(609)的夹紧力,且调节弹簧(801)设置在导块a(605)以及导块b(609)的两侧;
技术总结
本技术属于驱动抓手领域,公开了一种可自动调节抓取力度的伺服驱动抓手,包括底座,底座为空心座,底座的上方固定连接有固定座,固定座的内侧设置有电机座,电机座上安装有驱动机构,固定座的上方开设有调节空腔,调节空腔内安装有与驱动机构相连接的夹紧机构,夹紧机构的上方安装有夹爪组件,夹紧机构上设置有用于调节夹爪组件抓取力度的调节组件,该抓手都能够根据调节组件的设置进行准确的抓取,避免过度或不足的力度对物体造成损害或导致抓取失败。当抓取力度超过物体所能承受的范围时,驱动机构会相应调整力度,避免对物体造成破坏。这种自动调节功能可以保护抓取的物体免受损坏或变形。
技术研发人员:王双,李进冬,石双山,王强,白晨鹤,于明龙,陈佳男,王丹红,韩喜武,于杨
受保护的技术使用者:云科智能制造(沈阳)有限公司
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!