一种桁架机械手关节限位机构的制作方法
本技术涉及桁架机械手关节限位,具体涉及一种桁架机械手关节限位机构。
背景技术:
1、现有申请号为cn202223246030.x公开发布了一种桁架机械手关节限位机构,涉及桁架机械手技术领域,其中包括:气缸,所述气缸的输出端固定连接有电动滑轨,所述电动滑轨的底部滑动连接有滑动板,所述滑动板底部的前后两侧均固定连接有衔接板,所述衔接板的底部固定连接有固定板,所述固定板的两侧均转动连接有电动转轴,所述固定板通过电动转轴转动连接有第一夹持板、第二夹持板和第三夹持板,所述第一夹持板与第二夹持板之间的转轴套接有扭力弹簧。本实用新型的优点在于:通过在第一夹持板与第二夹持板之间设置扭力弹簧,使该机械手将夹持物夹持时能够通过扭力弹簧的扭力自动将夹持物夹紧,相对有电机控制夹紧容错率更高,能够降低夹持物由于机械手施加压力较大被夹坏的概率。
2、现有技术存在以下不足:上述的一种桁架机械手关节限位机构虽然能够降低夹持物由于机械手施加压力较大被夹坏的概率,但是上述的一种桁架机械手关节限位机构是通过弹簧来为第二夹持板提供预紧力,从而使得第二夹持板能有足够的夹持力来夹持物体,而这样的结构在夹取一些比较重的物体同时这个物体外形为圆柱形的物体时,如需要夹持体积大重量较重的转轴时,就需要通过第一夹持板与第二夹持板来夹持住转轴的两端,这时的夹持方式是通过第一夹持板与第二夹持板来将转轴的一端包裹住,就像人手握住棍子一样,而在将转轴夹取起来过后,因为第一夹持板与第二夹持板之间无限位结构,这就使得弹簧会因为受力带动第二夹持板向两边扩展,最终会导致转轴在运输的途中掉落。
3、因此,发明一种桁架机械手关节限位机构很有必要。
技术实现思路
1、为此,本实用新型提供一种桁架机械手关节限位机构,以解决背景技术中的问题。
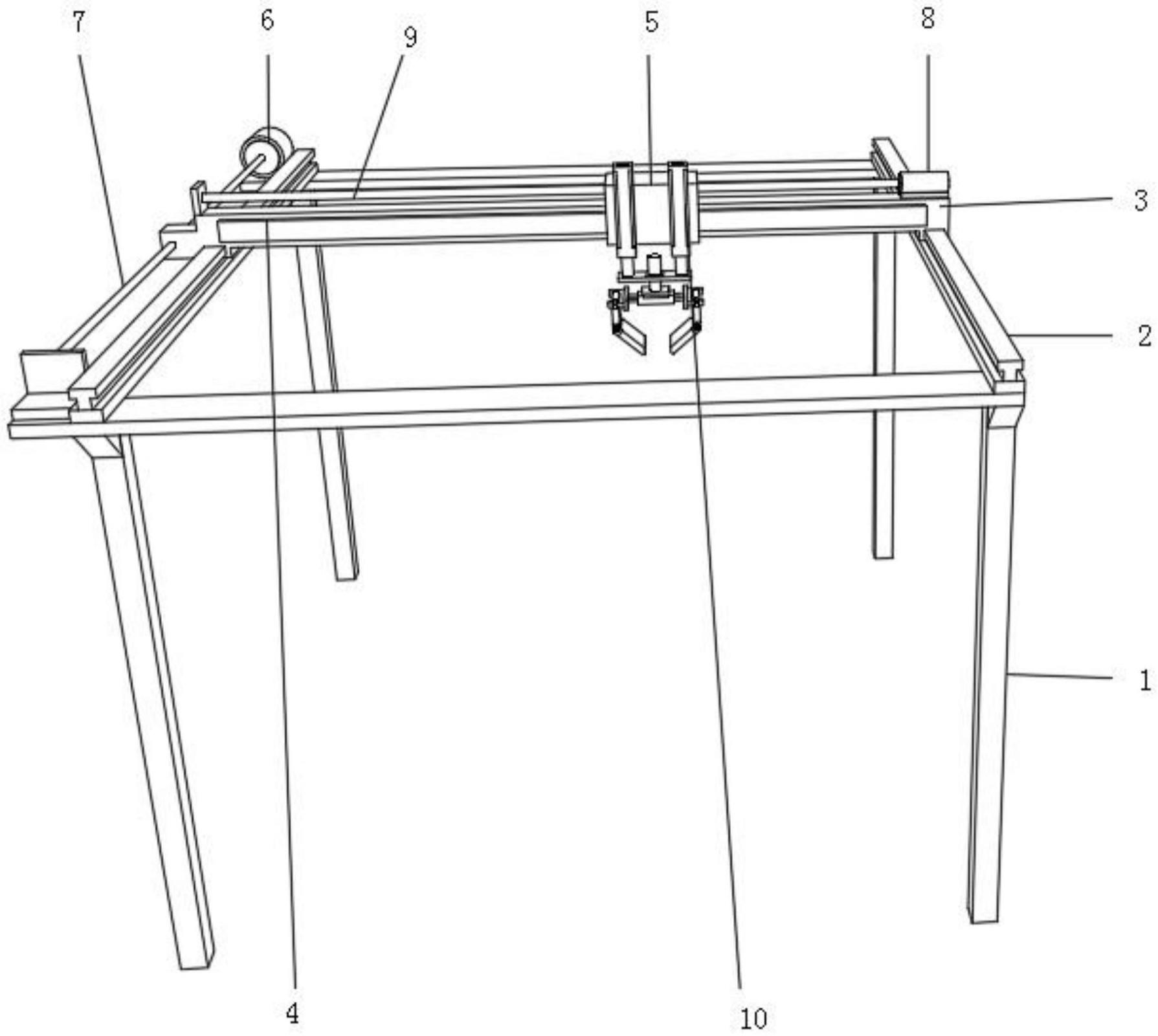
2、为了实现上述目的,本实用新型提供如下技术方案:一种桁架机械手关节限位机构,包括支撑架,所述支撑架顶部两侧都固定安装有导轨,所述导轨顶部滑道连接有移动架,所述移动架正面固定安装有滑道,所述滑道正面滑动连接有移动块,所述移动块正面固定安装有两个对称的电动伸缩杆;
3、所述电动伸缩杆输出端连接有限位夹取装置,所述限位夹取装置用于在一定的活动范围内夹取物件进行移动,所述支撑架与移动架外壁安装有制动装置,所述制动装置用于带动移动架与移动块进行移动。
4、优选的,所述制动装置包括:电机一、丝杆一、电机二、丝杆二;
5、所述电机一输出端与所述丝杆一外壁固定连接,所述电机二输出端与所述丝杆二外壁固定连接。
6、优选的,所述电机一底部与所述支撑架左侧顶部固定连接,所述丝杆一外壁与所述移动架左侧内壁螺纹连接,所述电机二底部与所述移动架右侧顶部固定连接,所述丝杆一外壁与所述移动块内壁螺纹连接。
7、优选的,所述限位夹取装置包括:两个上夹板、两个下夹板、两个弹簧;
8、两个所述下夹板顶部都固定安装有连接杆,两个所述上夹板底部内壁分别与两个所述连接杆外壁转动连接,两个所述弹簧内壁分别与两个所述连接杆外壁相接触。
9、优选的,所述弹簧两端分别与所述上夹板底部和所述下夹板顶部相接触,两个所述上夹板顶部内壁都固定安装有转轴,所述转轴外壁都转动连接有伺服马达二。
10、优选的,所述限位夹取装置还包括:两个转动块、两个转动槽;
11、两个所述转动槽分别开设在所述上夹板左右两侧底部,两个所述转动块分别与所述下夹板顶部相对面固定连接,所述转动块外壁与所述转动槽内壁滑动连接。
12、优选的,所述电动伸缩杆输出端固定安装有连接板,所述连接板顶部固定安装有伺服马达一,所述伺服马达一输出端固定安装有两个对称的双向电动伸缩杆。
13、优选的,所述双向电动伸缩杆的两侧输出端都固定安装有连接架,两个所述连接架相反面内壁分别与两个所述转轴外壁转动连接,两个所述连接架外壁分别与两个所述伺服马达二外壁固定连接。
14、本实用新型的有益效果是:通过设置转动块与转动槽,转动块滑动在转动槽内,这样就限制了转动块的转动范围,而转动块是与下夹板连接的,这样在夹持一些圆柱形并且体积大与重量重的物体时,弹簧产生变形后,就会有转动槽来限制转动块与下夹板的转动范围,从而对下夹板与上夹板连接关节处进行限位,从而能够防止弹簧逐渐带动下夹板向两边扩展导致夹持的物体掉落,保证物体能够安全地运输至指定地点。
技术特征:
1.一种桁架机械手关节限位机构,包括支撑架(1),所述支撑架(1)顶部两侧都固定安装有导轨(2),所述导轨(2)顶部滑道连接有移动架(3),所述移动架(3)正面固定安装有滑道(4),所述滑道(4)正面滑动连接有移动块(5),所述移动块(5)正面固定安装有两个对称的电动伸缩杆(10);
2.根据权利要求1所述的一种桁架机械手关节限位机构,其特征在于,所述制动装置包括:电机一(6)、丝杆一(7)、电机二(8)、丝杆二(9);
3.根据权利要求2所述的一种桁架机械手关节限位机构,其特征在于,所述电机一(6)底部与所述支撑架(1)左侧顶部固定连接,所述丝杆一(7)外壁与所述移动架(3)左侧内壁螺纹连接,所述电机二(8)底部与所述移动架(3)右侧顶部固定连接,所述丝杆一(7)外壁与所述移动块(5)内壁螺纹连接。
4.根据权利要求1所述的一种桁架机械手关节限位机构,其特征在于,所述限位夹取装置包括:两个上夹板(17)、两个下夹板(18)、两个弹簧(19);
5.根据权利要求4所述的一种桁架机械手关节限位机构,其特征在于,所述弹簧(19)两端分别与所述上夹板(17)底部和所述下夹板(18)顶部相接触,两个所述上夹板(17)顶部内壁都固定安装有转轴(15),所述转轴(15)外壁都转动连接有伺服马达二(16)。
6.根据权利要求5所述的一种桁架机械手关节限位机构,其特征在于,所述限位夹取装置还包括:两个转动块(21)、两个转动槽(22);
7.根据权利要求6所述的一种桁架机械手关节限位机构,其特征在于,所述电动伸缩杆(10)输出端固定安装有连接板(11),所述连接板(11)顶部固定安装有伺服马达一(12),所述伺服马达一(12)输出端固定安装有两个对称的双向电动伸缩杆(13)。
8.根据权利要求7所述的一种桁架机械手关节限位机构,其特征在于,所述双向电动伸缩杆(13)的两侧输出端都固定安装有连接架(14),两个所述连接架(14)相反面内壁分别与两个所述转轴(15)外壁转动连接,两个所述连接架(14)外壁分别与两个所述伺服马达二(16)外壁固定连接。
技术总结
本技术公开了一种桁架机械手关节限位机构,其技术方案是:包括支撑架,所述支撑架顶部两侧都固定安装有导轨,所述导轨顶部滑道连接有移动架,所述移动架正面固定安装有滑道,所述滑道正面滑动连接有移动块,所述移动块正面固定安装有两个对称的电动伸缩杆,所述电动伸缩杆输出端连接有限位夹取装置,所述限位夹取装置用于在一定的活动范围内夹取物件进行移动,所述支撑架与移动架外壁安装有制动装置,所述制动装置用于带动移动架与移动块进行移动,涉及桁架机械手关节限位技术领域,本技术能够防止弹簧逐渐带动下夹板向两边扩展导致夹持的物体掉落,保证物体能够安全地运输至指定地点。
技术研发人员:王志胜,吴丽芳,蒋情厂,赵清,张宇
受保护的技术使用者:南京夸特机电科技有限公司
技术研发日:20230615
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!