一种手动阀门手轮用扳手的制作方法
本技术涉及阀门扳手,尤其涉及一种手动阀门手轮用扳手。
背景技术:
1、手动阀是是管路流体输送系统中控制部件,它是用来改变通路断面和介质流动方向,具有导流、截止、调节、节流、止回、分流或溢流卸压等功能,是工厂企业管道中不可或缺的阀门,是切断或联通管道与设备、管道与管道之间的重要阀门,主要用在管道上和设备上。
2、阀门结构包括:阀芯、阀杆、阀座以及手轮,其中的手轮是辅助手部转动阀门而设计的。由于管道的尺寸大小不同或内部承压能力不同,与之适配安装的阀门规格也不同,对应的手轮大小也不同。现有技术中,辅助手部转动手轮的工具是扳手,扳手的大小规格是与手轮相匹配,通常情况下会用f扳手卡在手轮上转动而辅助手部转动,但是如果过手轮过大而f扳手太小,f扳手卡在手轮上不容易取下,甚至会因为用力取掉f扳手而反向转动,容易造成误操作,给生产带来麻烦;如果过手轮小而f扳手太大,f扳手之间的空隙太大卡在手轮上容易晃动甚至打滑,当用力转动f扳手时,极易因为打滑而时手部空转动,甚至会伤到手部,造成不同程度的人身伤害。所以,f扳手应该与手轮的规格大小相适配,但是,对于企业中数量繁多的阀门而言,就需要很多不同大小的f扳手,当工艺生产一异常状况时,操作人员需要同时携带多种f扳手在生产现场操作开关阀门,甚至还需要协同人员专门携带f扳手,给操作人员带来很大的麻烦,使用起来具有很大的局限性。
3、所以,现有技术中的f扳手出现打滑而造成人身伤害和操作受限的问题。
技术实现思路
1、为了解决上述f扳手出现打滑而造成人身伤害和操作受限的问题,本实用新型提供了一种手动阀门手轮用扳手,通过。
2、为了达到上述目的,本实用新型是通过以下技术方案实现的:
3、一种手动阀门手轮用扳手,用于在二维平面抓卡手轮和连杆,包括:
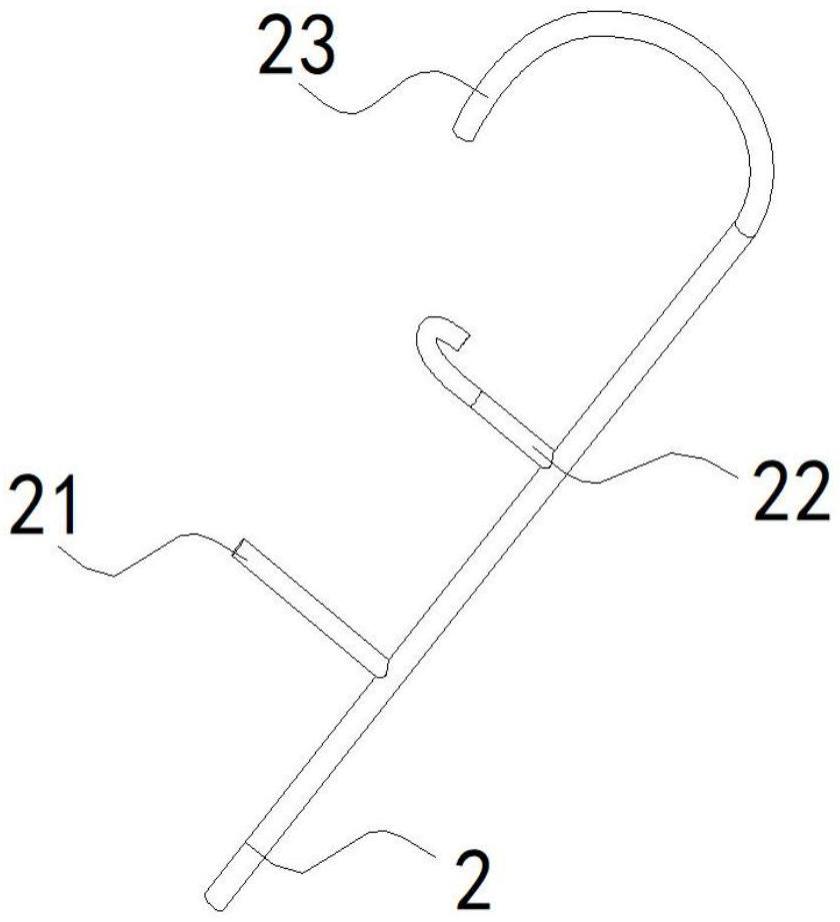
4、手柄。
5、第一爪柄,设置在手柄的下部,使用时,与手轮的外壁接触。
6、第二爪柄,位于手柄的中部,且与第一爪柄同平面,使用时,与手轮的内壁接触,由内向外钩接在手轮的外壁上。
7、第三爪柄,固定于手柄的顶部,与第一爪柄、第二爪柄异面,且垂直于第一爪柄、第二爪柄所在的平面,使用时,与连杆的背面钩接,用于抓卡连杆和手柄。
8、与现有技术相比,本实用新型具有以下优点:
9、扳手放在手轮上并进行转动时,手柄下部的第一爪柄与手轮的外壁接触,目的是在手轮的底部形成支点。第二爪柄钩在手柄外壁上,将手柄卡住,以使扳手能够平稳抓住手轮,防止手柄在转动的过程中出现打滑现象。第三爪柄在以垂直于第一爪柄、第二爪柄的平面上卡住连杆,实现异面垂直的方向抓住手轮,并在与连杆接触的点形成另一个支点,以此在空间内从不同的方向抓卡手轮,以此将扳手能够稳固地与手轮抓在一起,手部使用较小的力气就能转动手柄。由于第二爪柄与手柄、第三爪柄与连杆之间形成钩接的结构,在转动手柄的过程中,避免打滑而导致人身伤害。当遇到不同大小规格的手柄时,可任意将第一爪柄、第二爪柄以及第三爪柄组合使用,具有适用范围广的特点。
10、进一步优选为,第一爪柄上连接有第一钩头,第一钩头与第一爪柄拆卸连接,用于由外向内钩接在手轮的内壁上。
11、采用上述技术方案,第一爪柄不但在手轮的底部形成支点,通过第一钩头钩住手轮的内壁,目的是抓住手轮以防止在第一爪柄与手轮接触的点出现打滑的现象。
12、进一步优选为,第二爪柄上连接有第二钩头,第二钩头与第二爪柄拆卸连接,由内向外钩接在手轮的外壁上,用于抓卡手轮。
13、采用上述技术方案,通过第二钩头抓卡手轮而阻止在第二爪柄与手轮之间打滑。
14、进一步优选为,第三爪柄上呈弯钩状,其所在的平面与第二钩头所在的平面异面且垂直,用于在立体空间内与第二钩头或第二爪柄在相互垂直的方向抓卡手轮、手柄。
15、采用上述技术方案,第三爪柄与第二钩头异面,也因此与第二爪柄和第一爪柄异面,即与第一爪柄、第二爪柄从不同的方向抓卡手轮,在空间内形成稳定的抓卡方式,进而牢固的抓住手柄和连杆,方便手部操作手柄。
16、进一步优化为,第三爪柄呈弧形。
17、采用上述技术方案,弧形的第三爪柄很容易伸入手轮钩住连杆,便于操作手柄带动手轮转动。
18、进一步优化为,第一爪柄、第二爪柄均与手柄一体连接。
19、采用上述技术方案,转动手柄的过程中,手柄受到手部的作用力,并将作用力通过第一爪柄、第二爪柄传递至手轮上,通过一体连接防止第一爪柄与手柄的连接处、第二爪柄与手柄的连接处产生较大的应力而断裂,使扳手的整体结构具有结实耐用的特点。
20、进一步优化为,第一爪柄与第二爪柄尺寸相同。
21、采用上述技术方案,可以同程度的抓卡住手轮,便于转动手柄而带动手轮转动。
22、进一步优化为,第二钩头凹陷处的弧度小于第三爪柄的弧度。
23、采用上述技术方案,第三爪柄能够直接钩住连杆,并在连杆与手轮连接处形成支点,为转动手柄提供便利,具有省力的特点。
技术特征:
1.一种手动阀门手轮用扳手,用于在二维平面抓卡手轮(1)和连杆(11),其特征在于,包括:
2.根据权利要求1所述的手动阀门手轮用扳手,其特征在于,所述第一爪柄(21)上连接有第一钩头(24),所述第一钩头(24)与所述第一爪柄(21)拆卸连接,用于由外向内钩接在所述手轮(1)的内壁上。
3.根据权利要求1所述的手动阀门手轮用扳手,其特征在于,所述第二爪柄(22)上连接有第二钩头(25),所述第二钩头(25)与所述第二爪柄(22)拆卸连接,由内向外钩接在所述手轮(1)的外壁上,用于抓卡所述手轮(1)。
4.根据权利要求3所述的手动阀门手轮用扳手,其特征在于,所述第三爪柄(23)上呈弯钩状,其所在的平面与所述第二钩头(25)所在的平面异面且垂直,用于在立体空间内与所述第二钩头(25)或第二爪柄(22)在相互垂直的方向抓卡所述手轮(1)、手柄(2)。
5.根据权利要求3所述的手动阀门手轮用扳手,其特征在于,所述第三爪柄(23)呈弧形。
6.根据权利要求1所述的手动阀门手轮用扳手,其特征在于,所述第一爪柄(21)、所述第二爪柄(22)均与所述手柄(2)一体连接。
7.根据权利要求6所述的手动阀门手轮用扳手,其特征在于,所述第一爪柄(21)与所述第二爪柄(22)尺寸相同。
8.根据权利要求3所述的手动阀门手轮用扳手,其特征在于,所述第二钩头(25)凹陷处的弧度小于所述第三爪柄(23)的弧度。
技术总结
本技术公开了一种手动阀门手轮用扳手,包括手柄。第一爪柄,设置在手柄的下部。第二爪柄,位于手柄的中部,且与第一爪柄同平面,固定于手柄的顶部,与第一爪柄、第二爪柄异面,且垂直于第一爪柄、第二爪柄所在的平面。扳手放在手轮上并进行转动时,手柄下部的第一爪柄与手轮的外壁接触。第二爪柄钩在手柄外壁上,将手柄卡住,以使扳手能够平稳抓住手轮,防止手柄在转动的过程中出现打滑现象。第三爪柄在以垂直于第一爪柄、第二爪柄的平面上卡住连杆。由于第二爪柄与手柄、第三爪柄与连杆之间形成钩接的结构,避免打滑而导致人身伤害。当遇到不同大小规格的手柄时,可任意将第一爪柄、第二爪柄以及第三爪柄组合使用,具有适用范围广的特点。
技术研发人员:高杰,高鹏,强敏娜,高少锋,史瑞刚,李鸿烈,郭克星,王盈,韩小稚
受保护的技术使用者:陕西省特种设备检验检测研究院
技术研发日:20230616
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!