抓取装置及光伏清扫系统的制作方法
本技术涉及光伏,尤其涉及抓取装置及光伏清扫系统。
背景技术:
1、为了解决光伏系统的发电效率,会使用光伏清扫机器人对光伏组件上的灰尘进行清扫。光伏清扫机器人从光伏板的一端移动到另一端完成一排光伏板的清洗。要实现全自动化清洗,就要将光伏清扫机器人搬运到另一组光伏板上进行工作。目前,使用机械臂将光伏清扫机器人进行搬运,但是搬运的过程中,如果机械臂上的抓取装置失效,容易造成光伏清扫机器人从空中掉落的风险。
2、因此,有必要提供一种新的抓取装置及光伏清扫系统以解决上述问题
技术实现思路
1、本实用新型的目的在于提供一种抓取装置及光伏清扫系统,防止光伏清扫机器人从空中掉落。
2、为实现上述目的,本实用新型采用如下技术方案:
3、本实用新型揭示了一种抓取装置,用于抓取光伏清扫机器人,所述抓取装置包括:
4、支架;
5、驱动件,设置于所述支架;
6、挡板,安装于所述支架,所述挡板与所述驱动件的驱动端连接,所述挡板能够在所述驱动件的驱动下伸缩移动,当所述挡板处于相对于所述支架的伸出状态时,所述挡板能够抓取所述光伏清扫机器人。
7、作为本实用新型进一步改进的技术方案,所述抓取装置还包括磁吸组件,所述磁吸组件安装于所述支架,用于吸附并搬运所述光伏清扫机器人。
8、作为本实用新型进一步改进的技术方案,所述磁吸组件包括连接杆、磁铁及弹簧,所述弹簧套设在所述连接杆上,所述磁铁设置于所述连接杆的末端。
9、作为本实用新型进一步改进的技术方案,所述驱动件包括电机、本体及能够相对所述本体伸缩的伸缩杆,所述挡板安装于所述伸缩杆远离所述电机的端部。
10、作为本实用新型进一步改进的技术方案,所述驱动件的数量为两个且相对设置,两个所述伸缩杆的伸缩方向相反,所述挡板的数量为两个,所述挡板与所述伸缩杆一一对应设置。
11、作为本实用新型进一步改进的技术方案,所述挡板包括第一板和第二板,所述第一板与所述第二板垂直,所述第一板与所述伸缩杆连接,所述第二板能够抓取所述清扫机器人。
12、作为本实用新型进一步改进的技术方案,所述抓取装置还包括导向组件,所述导向组件包括导向座和导向杆,所述导向座设置于所述支架的底部,所述导向杆与所述支架平行,所述导向杆穿过所述导向座并与所述挡板连接。
13、为实现上述目的,本实用新型采用如下技术方案:
14、本实用新型揭示了一种光伏清扫系统,所述光伏清扫系统包括行走车辆、机械臂、光伏清扫机器人及如上述所述的抓取装置,所述机械臂安装于所述行走车辆,所述抓取装置安装于所述机械臂远离所述行走车辆的一端,所述抓取装置能够抓取所述光伏清扫机器人移动。
15、作为本实用新型进一步改进的技术方案,所述光伏清扫机器人包括两个安装梁及设置于所述两个安装梁之间且与两个所述安装梁连接的连接件,所述驱动件能够驱动所述挡板移动至所述连接件的底部并抓取所述光伏清扫机器人。
16、作为本实用新型进一步改进的技术方案,所述连接件为两个,两个所述连接件分别安装于所述两个安装梁的顶部。
17、相较于现有技术,本实用新型的有益效果在于:
18、本实用新型揭示了一种抓取装置,用于抓取光伏清扫机器人。抓取装置包括支架、驱动件以及挡板,驱动件设置于支架,挡板安装于支架,通过将挡板与驱动件的驱动端连接,挡板能够在驱动件的驱动下直线伸缩移动,从而使得当挡板处于相对与支架的伸出状态时,挡板能够抓取光伏清扫机器人,防止清扫机器人在搬运的过程中脱落,提高了光伏清扫系统的清扫效率,降低了人工成本。
技术特征:
1.一种抓取装置,用于抓取光伏清扫机器人(200),其特征在于,所述抓取装置包括:
2.如权利要求1所述的抓取装置,其特征在于:所述抓取装置还包括磁吸组件(4),所述磁吸组件(4)安装于所述支架(1),用于吸附并搬运所述光伏清扫机器人(200)。
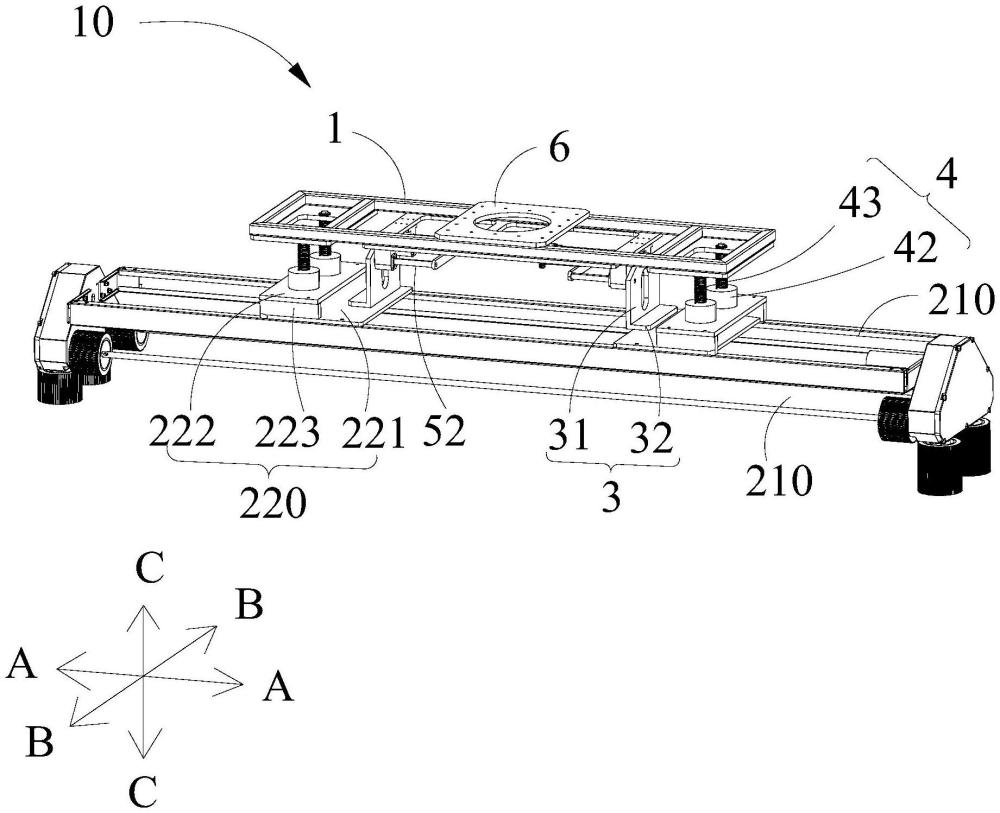
3.如权利要求2所述的抓取装置,其特征在于:所述磁吸组件(4)包括连接杆(41)、磁铁(42)及弹簧(43),所述弹簧(43)套设在所述连接杆(41)上,所述磁铁(42)设置于所述连接杆(41)的末端。
4.如权利要求1所述的抓取装置,其特征在于:所述驱动件(2)包括电机(21)、本体(22)及能够相对所述本体(22)伸缩的伸缩杆(23),所述挡板(3)安装于所述伸缩杆(23)远离所述电机(21)的端部。
5.如权利要求4所述的抓取装置,其特征在于:所述驱动件(2)的数量为两个且相对设置,两个所述伸缩杆(23)的伸缩方向相反,所述挡板(3)的数量为两个,所述挡板(3)与所述伸缩杆(23)一一对应设置。
6.如权利要求4所述的抓取装置,其特征在于:所述挡板(3)包括第一板(31)和第二板(32),所述第一板(31)与所述第二板(32)垂直,所述第一板(31)与所述伸缩杆(23)连接,所述第二板(32)能够抓取所述清扫机器人(200)。
7.如权利要求1所述的抓取装置,其特征在于:所述抓取装置还包括导向组件(5),所述导向组件(5)包括导向座(51)和导向杆(52),所述导向座(51)设置于所述支架(1)的底部,所述导向杆(52)与所述支架(1)平行,所述导向杆(52)穿过所述导向座(51)并与所述挡板(3)连接。
8.一种光伏清扫系统,其特征在于:所述光伏清扫系统包括行走车辆、机械臂、光伏清扫机器人(200)及如权利要求1-7任一项所述的抓取装置,所述机械臂安装于所述行走车辆,所述抓取装置安装于所述机械臂远离所述行走车辆的一端,所述抓取装置能够抓起所述光伏清扫机器人(200)移动。
9.如权利要求8所述的光伏清扫系统,其特征在于:所述光伏清扫机器人(200)包括两个安装梁(210)及设置于所述两个安装梁(210)之间且与两个所述安装梁(210)连接的连接件(220),所述驱动件(2)能够驱动所述挡板(3)移动至所述连接件(220)的底部并抓取所述光伏清扫机器人(200)。
10.如权利要求9所述的光伏清扫系统,其特征在于:所述连接件(220)为两个,两个所述连接件(220)分别安装于所述两个安装梁(210)的顶部。
技术总结
本技术揭示了一种抓取装置,用于抓取光伏清扫机器人。所述抓取装置包括支架、驱动件以及挡板。所述驱动件设置于所述支架。所述挡板安装于所述支架。所述挡板与所述驱动件的驱动端连接,所述驱动件能够在所述驱动件的驱动下直线伸缩移动,当所述挡板处于伸出状态时,所述挡板能够抓取所述光伏清扫机器人。本技术还揭示了一种光伏清扫系统。如此设置,能够防止光伏清扫机器人在搬运的过程中从空中脱落。
技术研发人员:刘林保,吕清涛
受保护的技术使用者:湖州丽天智能科技有限公司
技术研发日:20230619
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!