一种助力机械臂的制作方法
本技术涉及铜箔生产,具体为一种助力机械臂。
背景技术:
1、机械臂是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械臂机器各自的优点;机械臂是最早出现的工业机器人,也是最早出现的现代机器人,它可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、现有板式换热器用铜箔冲压件的自动下料机械手装置,直接对铜箔冲压件进行挤压抓取,挤压力过大会使铜箔冲压件变形,加压力过小铜箔冲压件在移动过程中会掉落,从而导致次品率增大、抓取速度慢、抓取不稳定的现象发生。
技术实现思路
1、本实用新型的目的在于提供一种助力机械臂,以解决上述背景技术中提出的现有板式换热器用铜箔冲压件的自动下料机械手装置,直接对铜箔冲压件进行挤压抓取,挤压力过大会使铜箔冲压件变形,加压力过小铜箔冲压件在移动过程中会掉落,从而导致次品率增大、抓取速度慢、抓取不稳定的现象发生的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种助力机械臂,包括支撑板,所述支撑板顶面上安装有机械臂本体,所述支撑板底端固定有若干个呈矩阵式排布的支撑柱,还包括:
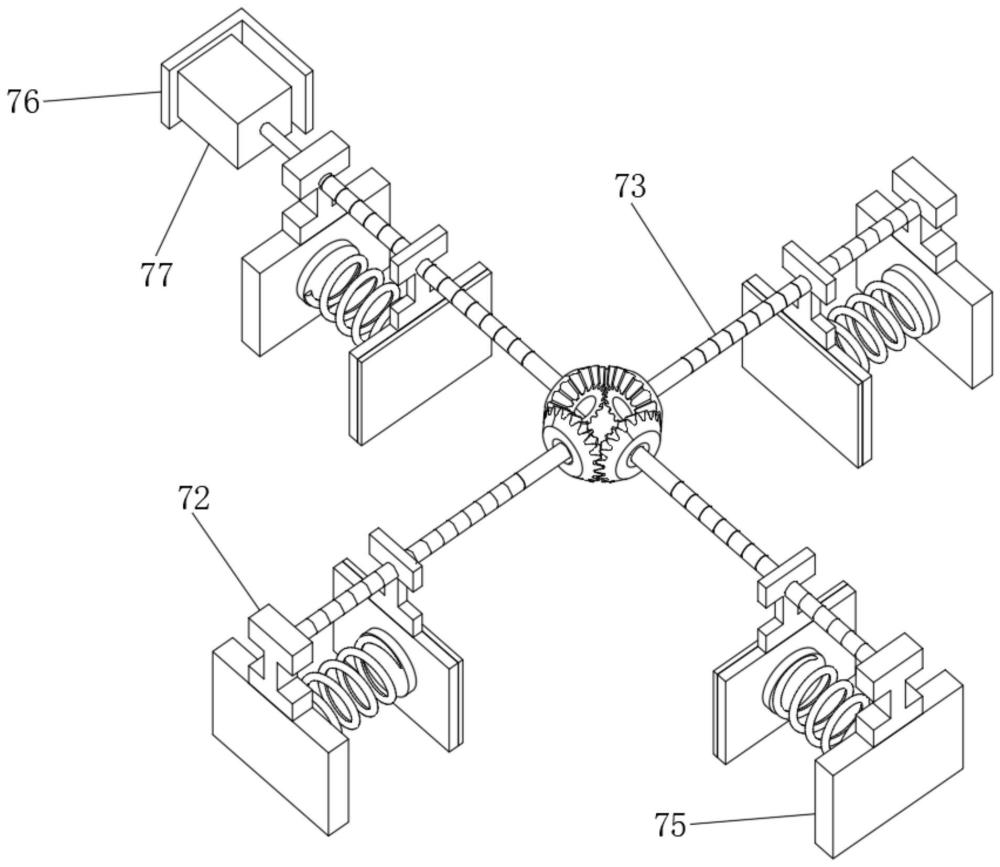
4、夹持机构,设置在机械臂本体连接端底面上,用于对铜箔冲压件进行夹持,所述夹持机构包括固定在机械臂本体连接端底面上的安装板,所述安装板底面设有四个呈环形等间距排布的导向槽,所述安装板内部靠近中间位置处设有放置槽,所述夹持机构还包括与安装板转动连接的四个转杆、与同侧转杆同轴连接且位于安装板表面同侧导向槽内部的四个螺杆、与同侧螺杆螺纹连接且与安装板表面同侧导向槽滑动连接的四个导向块,所述转杆的外壁上同轴连接有位于安装板内部放置槽内且相互垂直啮合的四个锥齿轮,所述夹持机构还包括固定在同侧导向块底端的四个移动板、位于同侧移动板靠近锥齿轮一侧的四个夹板、安装在夹板与同侧移动板之间的四个弹簧、固定在同侧夹板顶面上且与安装板表面同侧导向槽滑动连接的四个滑块,且所述螺杆贯穿同侧滑块,所述夹持机构还包括位于安装板一侧的电机、与电机输出轴同轴连接且与同侧螺杆同轴固定的转轴,所述转轴贯穿安装板侧壁并延伸至安装板表面同侧导向槽内。
5、优选的,所述支撑柱底端固定有底板,且所述底板底端安装有万向轮。
6、优选的,所述支撑板的右侧表面固定有两个牵引板,且两个所述牵引板分别位于支撑板右侧表面靠近前后两端处。
7、优选的,所述安装板表面导向槽的纵向剖面形状呈工字型,且所述滑块、导向块的形状均呈与安装板表面导向槽形状相适配的工字型。
8、优选的,所述弹簧与同侧移动板以及同侧夹板之间均固定有垫片,且所述垫片与同侧弹簧焊接固定在一起。
9、优选的,所述夹持机构还包括固定在同侧夹板靠近锥齿轮一侧表面的防护板,且所述防护板的厚度为2-4cm。
10、优选的,所述夹持机构还包括固定在安装板外壁上且形状呈l字型的固定板、固定在固定板竖板端靠近安装板一侧表面的保护盒,所述电机固定在固定板竖板端靠近安装板的一侧表面且位于保护盒内部,且所述转轴贯穿保护盒靠近安装板的一侧外壁。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过设置机械臂本体以及夹持机构从而可以对铜箔冲压件进行辅助夹持,通过设置夹持机构可以对铜箔冲压件进行稳定地夹持,且通过设置四个弹簧、四个夹板以及四个防护板从而可以防止铜箔冲压件变形;
13、2、本实用新型中夹持机构还包括固定在同侧夹板靠近锥齿轮一侧表面的防护板,且所述防护板的厚度为2-4cm,可以对铜箔冲压件的外壁进行防护。
技术特征:
1.一种助力机械臂,包括支撑板(1),其特征在于:所述支撑板(1)顶面上安装有机械臂本体(2),所述支撑板(1)底端固定有若干个呈矩阵式排布的支撑柱(3),还包括:
2.根据权利要求1所述的助力机械臂,其特征在于:所述支撑柱(3)底端固定有底板(4),且所述底板(4)底端安装有万向轮(5)。
3.根据权利要求1所述的助力机械臂,其特征在于:所述支撑板(1)的右侧表面固定有两个牵引板(6),且两个所述牵引板(6)分别位于支撑板(1)右侧表面靠近前后两端处。
4.根据权利要求1所述的助力机械臂,其特征在于:所述安装板(71)表面导向槽的纵向剖面形状呈工字型,且所述滑块(714)、导向块(72)的形状均呈与安装板(71)表面导向槽形状相适配的工字型。
5.根据权利要求1所述的助力机械臂,其特征在于:所述弹簧(711)与同侧移动板(75)以及同侧夹板(713)之间均固定有垫片(712),且所述垫片(712)与同侧弹簧(711)焊接固定在一起。
6.根据权利要求1所述的助力机械臂,其特征在于:所述夹持机构(7)还包括固定在同侧夹板(713)靠近锥齿轮(79)一侧表面的防护板(715),且所述防护板(715)的厚度为2-4cm。
7.根据权利要求1所述的助力机械臂,其特征在于:所述夹持机构(7)还包括固定在安装板(71)外壁上且形状呈l字型的固定板(76)、固定在固定板(76)竖板端靠近安装板(71)一侧表面的保护盒(77),所述电机(78)固定在固定板(76)竖板端靠近安装板(71)的一侧表面且位于保护盒(77)内部,且所述转轴(710)贯穿保护盒(77)靠近安装板(71)的一侧外壁。
技术总结
本技术涉及铜箔生产技术领域,具体为一种助力机械臂,包括支撑板,支撑板顶面上安装有机械臂本体,支撑板底端固定有若干个呈矩阵式排布的支撑柱,还包括:夹持机构,设置在机械臂本体连接端底面上,用于对铜箔冲压件进行夹持,夹持机构包括固定在机械臂本体连接端底面上的安装板,安装板底面设有四个呈环形等间距排布的导向槽,安装板内部靠近中间位置处设有放置槽,夹持机构还包括与安装板转动连接的四个转杆;本技术通过设置机械臂本体以及夹持机构可以对铜箔冲压件进行辅助夹持,通过设置夹持机构可以对铜箔冲压件进行稳定的夹持,且通过设置四个弹簧、四个夹板以及四个防护板从而可以防止铜箔冲压件变形。
技术研发人员:徐诗琴,徐岳圣,龙智
受保护的技术使用者:湖北钧正智能设备股份有限公司
技术研发日:20230619
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!