一种自移式机器人的制作方法
本技术涉及机器人设备领域,更具体地说,涉及一种自移式机器人。
背景技术:
1、自移式机器人一般为轮式或类人机器人,携带各种传感器,通过编程实现自主移动,在日常生活中也存在着机器人,利用机器人取代人工进行工作,例如在车间中,机器人承担着转送物料的作用,根据需求的不同,机器人的形状也各异。
2、基于上述,本发明人发现:现有自移式机器人功能单一,只具备转送物料的功能,实用性相对较低,另外,机器人转送物料途中,由于是利于滚轮实现移动,且周围不具备限位措施,导致转送物料时机器人会出现晃动或损坏,进而影响传送物料的效率,于是,有鉴于此,针对现有的结构予以研究改良,提供一种自移式机器人,以期达到具有更佳实用价值性的目的。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本实用新型的目的在于提供一种自移式机器人,它可以实现防止自移式机器人功能单一,只具备转送物料的功能,实用性相对较低,另外,机器人转送物料途中,由于是利于滚轮实现移动,且周围不具备限位措施,导致转送物料时机器人会出现晃动或损坏,进而影响转送物料效率的问题。
3、2.技术方案
4、为解决上述问题,本实用新型采用如下的技术方案。
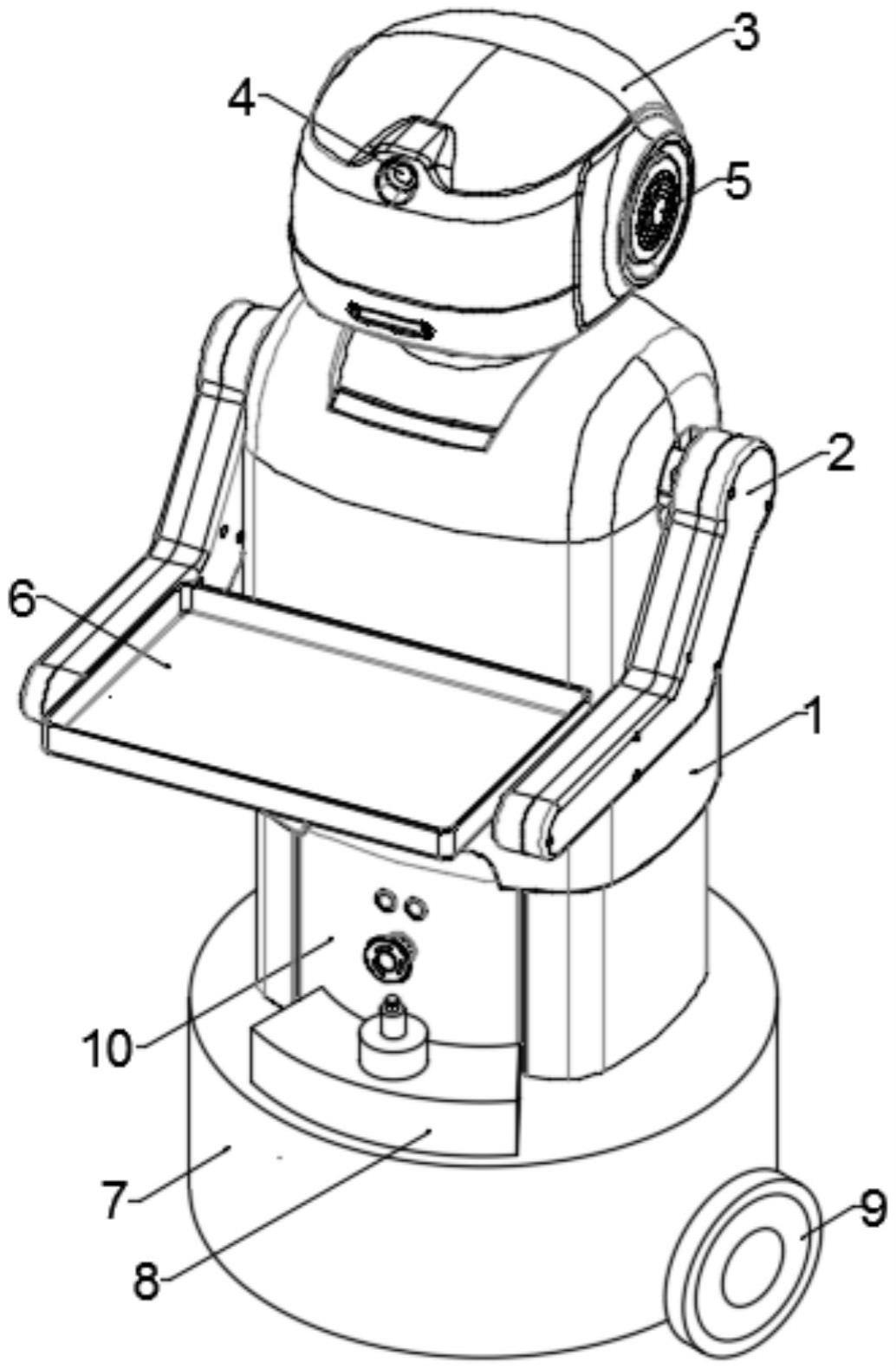
5、一种自移式机器人,包括机器人主体,所述机器人主体的一侧活动连接有机械手臂,且机器人主体的上方固定连接有控制器,所述控制器的一侧设置有摄像头,且控制器的外表壁固定连接有扩音器,所述机械手臂的一侧卡接设有置物盘,所述机器人主体的下方固定连接有底盘,所述底盘的上方固定连接有功能箱,且底盘的外侧设置有滚轮,所述机器人主体的外表壁固定连接有控制面板,所述滚轮的一侧设置有转轴,所述转轴的一侧活动连接有轴套,所述轴套的下方固定连接有限位筒,所述限位筒的下方设置有吸尘盘,所述吸尘盘的上方固定连接有螺纹杆,且吸尘盘的下方设置有吸附网垫。
6、进一步的,两组所述机械手臂于机器人主体的两侧相对称。
7、进一步的,所述置物盘与机械手臂采用卡接方式连接。
8、进一步的,所述置物盘的下方对称设有卡座,所述卡座的内侧设有凹口,所述凹口与机械手臂的尺寸相适配。
9、进一步的,所述底盘的下方设有半弧稳定座,所述半弧稳定座的下方设有升降座,且半弧稳定座的内侧设有供升降座升降的镂空层。
10、进一步的,所述功能箱包含抽液管、按压件、喷头,所述轴套的尺寸与转轴的尺寸相适配。
11、进一步的,所述螺纹杆的尺寸与限位筒的尺寸相适配,且螺纹杆与限位筒螺纹连接。
12、3.有益效果
13、相比于现有技术,本实用新型的优点在于:
14、(1)本方案,通过设置功能箱可对进入车间的工作人员进行消毒,利用吸尘盘配合吸附网垫可吸附地面上的灰尘,再利用螺纹杆与限位筒螺纹连接可实现吸尘盘的快速拆装,功能较多,实用性高。
15、(2)本方案,通过设置两组半弧稳定座固定于底盘的下方,利用多组可自动上下移动的升降座,可有效的保证机器人移动至需要物料位置的稳定性,即有效的解决了机器人整体的稳定性,还可保证机器人不会因为稳定性倒塌而损坏。
技术特征:
1.一种自移式机器人,包括机器人主体(1),其特征在于:所述机器人主体(1)的一侧活动连接有机械手臂(2),且机器人主体(1)的上方固定连接有控制器(3),所述控制器(3)的一侧设置有摄像头(4),且控制器(3)的外表壁固定连接有扩音器(5),所述机械手臂(2)的一侧卡接设有置物盘(6),所述机器人主体(1)的下方固定连接有底盘(7),所述底盘(7)的上方固定连接有功能箱(8),且底盘(7)的外侧设置有滚轮(9),所述机器人主体(1)的外表壁固定连接有控制面板(10),所述滚轮(9)的一侧设置有转轴(11),所述转轴(11)的一侧活动连接有轴套(12),所述轴套(12)的下方固定连接有限位筒(13),所述限位筒(13)的下方设置有吸尘盘(14),所述吸尘盘(14)的上方固定连接有螺纹杆(15),且吸尘盘(14)的下方设置有吸附网垫(16)。
2.根据权利要求1所述的一种自移式机器人,其特征在于:两组所述机械手臂(2)于机器人主体(1)的两侧相对称。
3.根据权利要求1所述的一种自移式机器人,其特征在于:所述置物盘(6)与机械手臂(2)采用卡接方式连接。
4.根据权利要求1所述的一种自移式机器人,其特征在于:所述置物盘(6)的下方对称设有卡座(61),所述卡座(61)的内侧设有凹口(62),所述凹口(62)与机械手臂(2)的尺寸相适配。
5.根据权利要求1所述的一种自移式机器人,其特征在于:所述底盘(7)的下方设有半弧稳定座(71),所述半弧稳定座(71)的下方设有升降座(72),且半弧稳定座(71)的内侧设有供升降座(72)升降的镂空层。
6.根据权利要求1所述的一种自移式机器人,其特征在于:所述功能箱(8)包含抽液管、按压件、喷头,所述轴套(12)的尺寸与转轴(11)的尺寸相适配。
7.根据权利要求1所述的一种自移式机器人,其特征在于:所述螺纹杆(15)的尺寸与限位筒(13)的尺寸相适配,且螺纹杆(15)与限位筒(13)螺纹连接。
技术总结
本技术公开了一种自移式机器人,属于机器人设备领域,一种自移式机器人,包括机器人主体,所述机器人主体的一侧活动连接有机械手臂,且机器人主体的上方固定连接有控制器,所述控制器的一侧设置有摄像头,且控制器的外表壁固定连接有扩音器,所述机械手臂的一侧卡接设有置物盘,所述机器人主体的下方固定连接有底盘,所述底盘的上方固定连接有功能箱,且底盘的外侧设置有滚轮,所述机器人主体的外表壁固定连接有控制面板;通过设置功能箱可对进入者进行消毒,利用吸尘盘配合吸附网垫可吸附地面上的灰尘,再利用螺纹杆与限位筒螺纹连接可实现吸尘盘的快速拆装,功能较多,实用性高。
技术研发人员:庞守恩,孙振行,徐龙生,杨纪冲
受保护的技术使用者:山东省凯麟环保设备股份有限公司
技术研发日:20230619
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!