一种四足仿生钢筋绑扎机器人
本技术属于建筑和机械设备,尤其涉及一种四足仿生钢筋绑扎机器人。
背景技术:
1、目前现有的钢筋绑扎机器人基本可以实现钢筋网的智能化、规模化捆扎,且结构新颖、轻巧灵活。其行走机构多为车轮或履带,导致其只能在水平放置或坡度较低的钢筋网上进行绑扎工作,同时其视觉系统多采用单目摄像头,导致其只能针对单层钢筋网进行绑扎工作,然而钢筋绑扎施工现场复杂多变,多存在坡度大于25度的斜坡以及圆形的隧道双层钢筋网,该种情况下的钢筋绑扎工作只能依靠人力去完成,存在一定的安全风险。因此,针对上述设备无法在坡度较高的钢筋网以及圆形的隧道钢筋网施工现场工作的问题,亟需得到解决,以改善设备的使用场景,增加设备的适应性与实用性,同时提高设备工作的安全性。
2、专利公开号为cn217902290u,名称为一种钢筋绑扎机器人感知与智能控制系统的专利申请,钢筋绑扎机器人在上层钢筋和下层钢筋组成的钢筋网上移动并进行钢筋交叉节点的绑扎;该钢筋绑扎机器人感知与智能控制系统包括:机架,在机架上安装有上筋行走机构、下筋行走机构、钢筋绑扎机、直流减速电机、树莓派单目摄像头、红外激光测距传感器和超声波测距传感器,在机架内部设置有树莓派、树莓派拓展模块、微处理器;树莓派分别与树莓派拓展模块与微处理器通信,树莓派连接树莓派单目摄像头,树莓派拓展模块上连接红外激光测距传感器和超声波测距传感器。该专利申请能够控制钢筋绑扎机器人通过车轮移动进行钢筋节点的绑扎,但该专利申请无法适用于坡度大于25度的斜坡钢筋网,且不适用于双层钢筋网。
技术实现思路
1、为了克服上述现有技术中存在的问题,本实用新型的目的在于提供一种四足仿生钢筋绑扎机器人,通过四足爬行组件实现大角度钢筋网的爬行工作,并通过传动机构控制钢筋绑扎机实现钢筋的精准绑扎。
2、为实现上述目的,本实用新型采用的技术方案是:
3、一种四足仿生钢筋绑扎机器人,包括:
4、机体,所述机体的中央设置有通孔,所述机体的底部安装有双目相机;
5、传动机构,所述传动机构安装在所述机体的通孔中,所述传动机构具有滑动部件;
6、钢筋绑扎机,所述钢筋绑扎机安装在所述传动机构的滑动部件上;
7、四个四足爬行组件,四个所述四足爬行组件分别设置在所述机体的四个边角处;
8、其中,所述钢筋绑扎机能够沿垂直于所述机体通孔的方向上下移动;所述四足爬行组件包括第一旋转舵机,所述第一旋转舵机固定在机体上,所述第一旋转舵机转动连接有旋转支撑模块,所述旋转支撑模块上安装有第二旋转舵机,所述第二旋转舵机转动连接有关节模块,所述关节模块上安装有第三旋转舵机,所述第三旋转舵机转动连接有夹爪;所述第二旋转舵机的旋转轴的轴向与所述第一旋转舵机的旋转轴的轴向垂直;所述第三旋转舵机的旋转轴的轴向与所述第二旋转舵机的旋转轴的轴向平行。
9、可选的,所述第一旋转舵机的旋转轴的轴向与所述钢筋绑扎机的运动方向相平行。
10、可选的,所述第一旋转舵机上安装有与所述旋转支撑模块连接的第一法兰盘,所述第二旋转舵机上安装有与所述关节模块连接的第二法兰盘。
11、可选的,所述传动机构包括旋转步进电机,所述旋转步进电机上安装有动力齿轮,所述动力齿轮的两侧啮合连接有第一传动齿轮和第二传动齿轮;所述第一传动齿轮上固定有第一丝杆,所述第二传动齿轮上固定有第二丝杆,所述第一丝杆与所述第二丝杆上均套接有滑动部件。
12、可选的,所述机体上固定有定位圆台,所述传动机构一端固定在所述定位圆台上,另一端设置在所述机体的通孔中,所述旋转步进电机固定在所述定位圆台顶部,所述定位圆台的顶部与所述第一传动齿轮之间、所述定位圆台的顶部与所述第二传动齿轮之间均转动连接。
13、可选的,所述滑动部件包括第一滑块、第二滑块和绑扎机连接块,所述第一滑块套接在所述第一丝杆上,所述第二滑块套接在所述第二丝杆上,所述绑扎机连接块的一侧与所述第一滑块连接,另一侧与所述第二滑块连接,所述绑扎机连接块与所述钢筋绑扎机固定连接。
14、可选的,所述夹爪包括夹爪机座,所述夹爪机座上固定有用于控制夹爪开合的夹爪舵机,所述夹爪机座底部安装有两个导轨,两个所述导轨上均滑动安装有活动爪头,所述活动爪头底部固定安装有用于夹紧钢筋的钢筋手爪。
15、可选的,两个所述导轨所在平面与所述第三旋转舵机的旋转轴的轴向平行。
16、可选的,所述活动爪头上固定安装有齿条,所述夹爪舵机上安装有夹爪驱动齿轮,两个所述齿条均与所述夹爪驱动齿轮啮合,且两个所述导轨相互平行,所述夹爪驱动齿轮设置在两个所述导轨之间。
17、可选的,两个所述导轨关于所述夹爪驱动齿轮对称。
18、与现有技术相比,本实用新型具有以下有益效果:
19、本实用新型的一种四足仿生钢筋绑扎机器人,通过传动机构的设置,可以对钢筋绑扎机的上下移动距离进行调整,使得钢筋绑扎机对绑扎点进行精准的绑扎工作,以保证绑扎工作的稳定性。本实用新型的底部设置有双面摄像头,能够准确判定钢筋的位置。本实用新型通过四足爬行组件和夹爪的设置,可以模仿动物走路,通过控制四足爬行组件和夹爪的配合,带动机体在钢筋网施工现场规则移动。本实用新型的四足爬行组件设置有三个独立旋转的第一舵机、第二舵机和第三舵机。所述第二旋转舵机的旋转轴的轴向与所述第一旋转舵机的旋转轴的轴向垂直;所述第三旋转舵机的旋转轴的轴向与所述第二旋转舵机的旋转轴的轴向平行。通过第一舵机、第二舵机和第三舵机的配合,能够实现带动整个设备在复杂环境下正常工作,完成旋转和伸缩动作。通过夹爪的设置,可以在行走过程中夹紧钢筋,从而保证设备在坡度大于25度的斜坡以及圆形的隧道双层钢筋网施工现场正常工作,保证绑扎机器人的适应性、实用性以及安全性。
20、进一步,本实用新型的传动机构通过旋转步进电机带动齿轮组件以及丝杆转动,能够精准控制钢筋绑扎机的运动。
21、进一步,本实用新型的传动机构的外侧设置了定位圆台,可以对传动机构以及钢筋绑扎机进行保护。
技术特征:
1.一种四足仿生钢筋绑扎机器人,其特征在于,包括:
2.根据权利要求1所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述第一旋转舵机(601)的旋转轴的轴向与所述钢筋绑扎机(5)的运动方向相平行。
3.根据权利要求1所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述第一旋转舵机(601)上安装有与所述旋转支撑模块(603)连接的第一法兰盘(602),所述第二旋转舵机(604)上安装有与所述关节模块(606)连接的第二法兰盘(605)。
4.根据权利要求1所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述传动机构(4)包括旋转步进电机(401),所述旋转步进电机(401)上安装有动力齿轮(410),所述动力齿轮(410)的两侧啮合连接有第一传动齿轮(402)和第二传动齿轮(409);所述第一传动齿轮(402)上固定有第一丝杆(403),所述第二传动齿轮(409)上固定有第二丝杆(408),所述第一丝杆(403)与所述第二丝杆(408)上均套接有滑动部件。
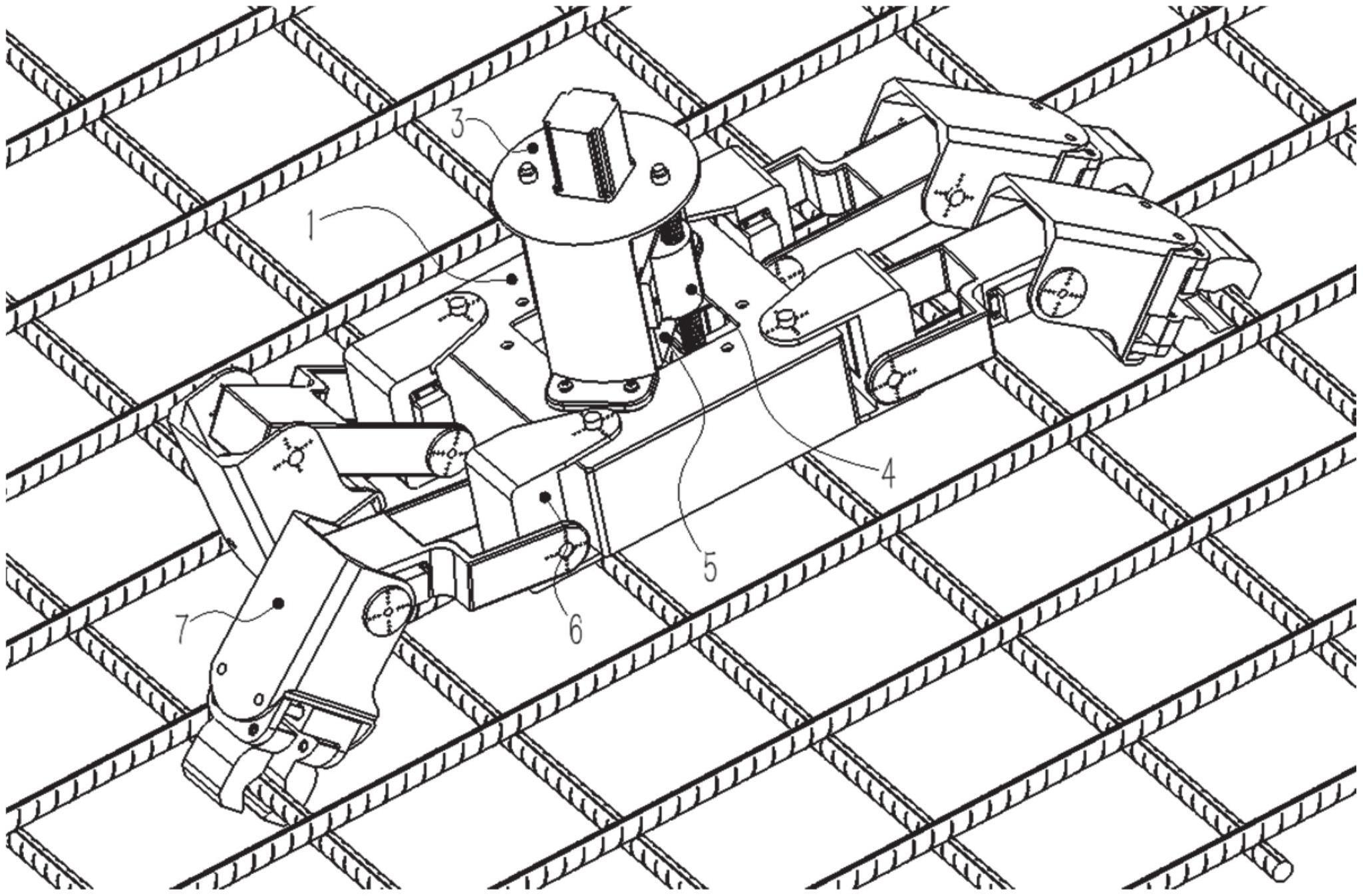
5.根据权利要求4所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述机体(1)上固定有定位圆台(3),所述传动机构(4)一端固定在所述定位圆台(3)上,另一端设置在所述机体(1)的通孔中,所述旋转步进电机(401)固定在所述定位圆台(3)顶部,所述定位圆台(3)的顶部与所述第一传动齿轮(402)之间、所述定位圆台(3)的顶部与所述第二传动齿轮(409)之间均转动连接。
6.根据权利要求4所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述滑动部件包括第一滑块(404)、第二滑块(407)和绑扎机连接块(405),所述第一滑块(404)套接在所述第一丝杆(403)上,所述第二滑块(407)套接在所述第二丝杆(408)上,所述绑扎机连接块(405)的一侧与所述第一滑块(404)连接,另一侧与所述第二滑块(407)连接,所述绑扎机连接块(405)与所述钢筋绑扎机(5)固定连接。
7.根据权利要求1所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述夹爪(7)包括夹爪机座(701),所述夹爪机座(701)上固定有用于控制夹爪(7)开合的夹爪舵机(702),所述夹爪机座(701)底部安装有两个导轨(703),两个所述导轨(703)上均滑动安装有活动爪头(704),所述活动爪头(704)底部固定安装有用于夹紧钢筋的钢筋手爪(705)。
8.根据权利要求7所述的一种四足仿生钢筋绑扎机器人,其特征在于,两个所述导轨(703)所在平面与所述第三旋转舵机(607)的旋转轴的轴向平行。
9.根据权利要求7所述的一种四足仿生钢筋绑扎机器人,其特征在于,所述活动爪头(704)上固定安装有齿条(706),所述夹爪舵机(702)上安装有夹爪驱动齿轮(707),两个所述齿条(706)均与所述夹爪驱动齿轮(707)啮合,且两个所述导轨(703)相互平行,所述夹爪驱动齿轮(707)设置在两个所述导轨(703)之间。
10.根据权利要求9所述的一种四足仿生钢筋绑扎机器人,其特征在于,两个所述导轨(703)关于所述夹爪驱动齿轮(707)对称。
技术总结
本技术公开了一种四足仿生钢筋绑扎机器人,机体的底部安装有双目相机;传动机构安装在机体的通孔中,传动机构具有滑动部件;钢筋绑扎机安装在传动机构的滑动部件上;四个四足爬行组件分别设置在机体的四个边角处;第一旋转舵机固定在机体上,第一旋转舵机转动连接有旋转支撑模块,旋转支撑模块上安装有第二旋转舵机,第二旋转舵机转动连接有关节模块,关节模块上安装有第三旋转舵机,第三旋转舵机连接有夹爪。本技术通过传动机构可以使钢筋绑扎机对绑扎点进行精准的绑扎工作。通过舵机的配合,能够实现完成旋转和伸缩动作。通过夹爪的设置,可以保证设备在坡度大于25度的斜坡以及圆形的隧道双层钢筋网施工现场正常工作。
技术研发人员:成彬,赵彬兵
受保护的技术使用者:西安建筑科技大学
技术研发日:20230621
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!